
















 首頁
首頁英特爾 RealSense 於 GTC 大會首度展示自主導航類人型機器人
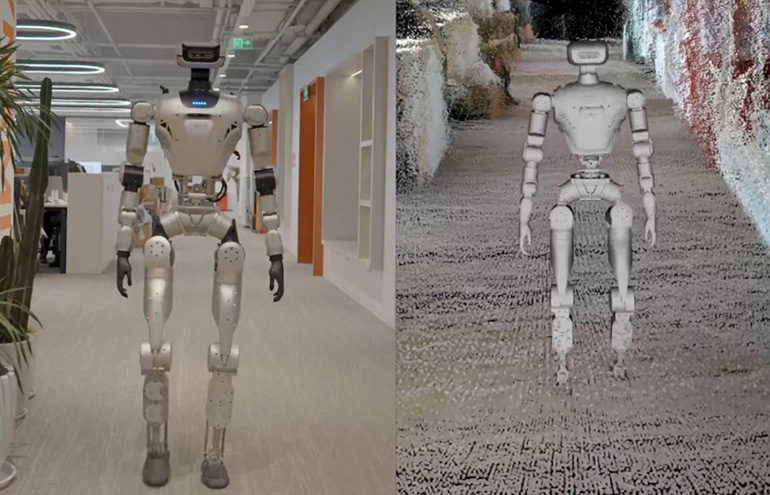
LimX 透過 RealSense 攝影機與 NVIDIA CuVSLAM 展示安全導航技術。來源:RealSense
隨著人形機器人從原型機邁向實際應用,可靠的感知能力已不僅關乎性能,更成為安全性的關鍵。RealSense在本週的 NVIDIA GTC 大會上特別強調了這一點,並展示了與 LimX Dynamics 共同開發的先進導航能力。
「人形機器人需在複雜的三維空間中與人類並肩運作,且所處環境不斷變化,」RealSense 執行長 Nadav Orbach 表示。「若要讓機器人能安全地與人類協作,其感知系統必須超越單純處理原始感測器資料的層面。它們需要像視覺皮質一樣運作,才能在非結構化環境中實現精確定位、避障、地形理解,以及穩定且可預測的移動。」
RealSense 去年從英特爾(Intel Corp.)分拆出來,為自主移動機器人(AMR)、類人型機器人,以及工業自動化、醫療保健和門禁控制等各類應用提供深度相機和視覺系統。這家總部位於加州庫比蒂諾的公司表示,其感知技術能讓機器和實體人工智慧可靠且智慧地在人類世界中導航並進行互動。
RealSense 為類人型機器人提供「視覺皮質」
「賦予機器人視覺的相機、先進感知及推理軟體,不僅是導航或任務執行的工具,」RealSense 解釋道。「它們是類人型機器人的視覺皮質,使其能在人類環境中有效移動、工作及運作。」
該公司聲稱,其在加州聖荷西 GTC 大會上展示的自主類人型機器人導航技術,是業界首創。LimX Dynamics 計畫展示高密度 3D 深度感知技術如何讓腿式機器人能夠安全且可預測地進行定位、建圖與自主導航。
該系統採用搭載 vSLAM(視覺同步定位與建圖)技術的 RealSense 深度相機,並整合 NVIDIA CuVSLAM 的里程計技術。NVIDIA Isaac Lab 加速了這套技術疊層的開發進程,為強化學習與策略訓練提供了高保真度的數位環境。
總部位於中國深圳的 LimX Dynamics 表示,這種「模擬優先」的方法有助於彌合「模擬與現實」之間的鴻溝,使其類人型機器人能在 NVIDIA GTC 實體亮相前,以經證實的安全性掌握複雜的 3D 操作。
類人型機器人需要三維空間導航能力
RealSense 指出,輪式機器人通常在可預測的平坦平面移動,並以速度和效率為優先考量——機器人吸塵器便是最佳例證。
然而,該公司指出,類人型機器人和四足機器人面臨著更大的挑戰。它們在完整的 3D 空間中進行導航,這涉及接觸點的變化和非線性運動。這需要穩定的腳部定位和持續的環境感知能力。
「僅靠編碼器測距與 2D 雷射雷達(LIDAR)——這類技術通常應用於輪式機器人——缺乏實現穩定且安全移動所需的全面 3D 感知能力,」RealSense 強調。「迄今為止,這項限制已阻礙了機器人的部署,迫使許多多足機器人必須依賴遙控操作、近距離監督,或僅能在嚴格受控的環境中運作。」
編者註:RealSense 首席行銷長 Mike Nielsen 將於 2026 年機器人峰會暨博覽會上,參與以「類人型機器人現況」為題的主題座談。
LimX Dynamics 將展示更安全的機器人發展路徑
合作夥伴表示,他們將展示 RealSense 的高密度深度感知技術,結合 NVIDIA 視覺里程計與 cuVSLAM,如何提供場景理解、定位、建圖及導航功能。這使 LimX 的人形機器人能夠在 3D 空間中安全運作。
具體而言,他們闡述了更安全的機器人技術應具備以下要素:
精準的定位與建圖,確保機器人隨時掌握自身位置與周遭環境。避開與人員及移動物體的碰撞。透過對地形、邊緣及高度變化的 3D 感知,實現防跌倒與穩定行走。可預測且符合人類直覺的動作,將突然停下或不規則修正的情況降至最低。「高密度 3D 感知技術也解鎖了過去難以安全執行的全新行為,」RealSense 解釋道。「這些包括樓梯導航、路緣與高度偵測、穿越不平坦地形,以及在共享空間中進行動態障礙物避讓。先進的路徑規劃讓機器人能夠適應不斷變化的狀況,例如移動中的推車、位移的托盤,或是進入其路徑的人員。」
RealSense 表示,LimX Dynamics 的示範凸顯了該公司在更廣泛的機器人生態系統中日益擴大的角色。該公司指出其在深度感測領域十年的創新成果,包括針對近距離與中距離感測所優化的主動式立體視覺技術,以及成熟的軟體開發套件 (SDK) 生態系統。
此外,RealSense 表示,該公司已協助機器人團隊更高效地進行原型開發與規模化生產,並正加速推動類人型系統安全自主駕駛技術的發展。
相關文章
 Nvidia 的 OpenClaw 變體或許能解決其最大的挑戰:安全性
Nvidia 執行長黃仁勳認為,每家公司都需要一套 OpenClaw 策略——而 Nvidia 已準備好提供這項解決方案。在週一的 GTC 主題演講中,黃仁勳宣布 NVIDIA 已打造出 NemoClaw,這是一個源自廣受歡迎的本地 AI 自主代理程式(OpenClaw)的企業級平台。這個開源平台本質上是整合了企業級安全與隱私功能的 OpenClaw。根據 Nvidia 的說法,目標是將 Open
五角大樓與英偉達、微軟和亞馬遜網路服務公司簽訂了協議,以便在機密網路中部署人工智慧技術。
在此前與谷歌、SpaceX和OpenAI達成協議之後,美國國防部於週五宣佈,它現已與Nvidia、微軟、亞馬遜網路服務和Reflection AI簽訂了合同,這些公司將會將其人工智慧技術和模型部署在保密網路上,用於“合法的操作用途”。宣告中還指出:“這些協議加速了將美國軍隊建設成為以人工智慧為核心作戰力量的程序,並將增強我們的戰士在所有戰爭領域保持決策優勢的能力。”這些協議的簽署,正值五角大樓試圖在與Anthropic就使用條款發生爭議後,多元化其人工智慧供應商的選擇。五角大樓希望無限制地使
Nvidia GTC 發表 NemoClaw、機器人奧拉夫,以及一兆美元的豪賭
正在載入播放器……執行長黃仁勳本週身穿招牌皮夾克登上 Nvidia GTC 大會的舞台,發表了一場長達兩小時半的主題演說。他在演說中預測,至 2027 年人工智慧晶片銷售額將達到 1 兆美元,並宣稱每家公司都需要一套「OpenClaw 策略」,最後則以一段語無倫次的 Olaf 機器人表演作為結尾,甚至不得不切斷其麥克風。 訊息不言而喻:Nvidia 希望成為一切的基石,從 AI 訓練到自動駕駛汽車
相關專題推薦
商業
Nvidia 的 OpenClaw 變體或許能解決其最大的挑戰:安全性
Nvidia 執行長黃仁勳認為,每家公司都需要一套 OpenClaw 策略——而 Nvidia 已準備好提供這項解決方案。在週一的 GTC 主題演講中,黃仁勳宣布 NVIDIA 已打造出 NemoClaw,這是一個源自廣受歡迎的本地 AI 自主代理程式(OpenClaw)的企業級平台。這個開源平台本質上是整合了企業級安全與隱私功能的 OpenClaw。根據 Nvidia 的說法,目標是將 Open
五角大樓與英偉達、微軟和亞馬遜網路服務公司簽訂了協議,以便在機密網路中部署人工智慧技術。
在此前與谷歌、SpaceX和OpenAI達成協議之後,美國國防部於週五宣佈,它現已與Nvidia、微軟、亞馬遜網路服務和Reflection AI簽訂了合同,這些公司將會將其人工智慧技術和模型部署在保密網路上,用於“合法的操作用途”。宣告中還指出:“這些協議加速了將美國軍隊建設成為以人工智慧為核心作戰力量的程序,並將增強我們的戰士在所有戰爭領域保持決策優勢的能力。”這些協議的簽署,正值五角大樓試圖在與Anthropic就使用條款發生爭議後,多元化其人工智慧供應商的選擇。五角大樓希望無限制地使
Nvidia GTC 發表 NemoClaw、機器人奧拉夫,以及一兆美元的豪賭
正在載入播放器……執行長黃仁勳本週身穿招牌皮夾克登上 Nvidia GTC 大會的舞台,發表了一場長達兩小時半的主題演說。他在演說中預測,至 2027 年人工智慧晶片銷售額將達到 1 兆美元,並宣稱每家公司都需要一套「OpenClaw 策略」,最後則以一段語無倫次的 Olaf 機器人表演作為結尾,甚至不得不切斷其麥克風。 訊息不言而喻:Nvidia 希望成為一切的基石,從 AI 訓練到自動駕駛汽車
相關專題推薦
商業
 頂尖 AI 定價優化軟體:追蹤競爭對手並自動調整商店價格
頂尖 AI 定價優化軟體:追蹤競爭對手並自動調整商店價格
立即在 XIX.AI 探索 2026 年最佳 AI 定價優化軟體。我們精心挑選的清單收錄了備受好評、能徹底改變遊戲規則的工具,這些工具不僅能追蹤競爭對手,還能自動調整您的商店價格,以實現利潤最大化。透過實際測試,比較免費與付費方案的差異。立即掌握您的定價優勢。
 10 個工具
10 個工具
 xix.ai
代碼
最佳 AI 程式碼審查工具:自動化確保程式碼整潔度,並重構舊版儲存庫檔案
xix.ai
代碼
最佳 AI 程式碼審查工具:自動化確保程式碼整潔度,並重構舊版儲存庫檔案
立即在 XIX.AI 探索 2026 年最佳 AI 程式碼審查工具。我們精心挑選的清單收錄了備受好評、能徹底改變遊戲規則的工具,可自動確保程式碼符合規範,並重構舊版儲存庫檔案。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即掌握您的 AI 競爭優勢。
10 個工具
xix.ai
文字轉語音
專為閱讀障礙設計的頂尖 AI 語音合成應用程式:協助學生提升學習與閱讀效率
探索 2026 年最新精選、專為閱讀障礙者設計的頂級 AI 語音合成(TTS)應用程式。我們的專家評比將免費與付費工具進行對照,重點介紹能提升閱讀效率與學習成效的強大功能。發掘這些必試且能帶來革命性改變的解決方案,釋放學生的潛能。立即前往 XIX.AI 展開您的探索之旅。
10 個工具
xix.ai
漫畫創作
少年漫畫頂尖 AI 生成器:打造高張力動作場面與能量特效
立即前往 XIX.AI,探索 2026 年最優秀的少年漫畫 AI 生成工具。我們精心挑選的頂級清單,匯集了能打造高張力動作場面與動態能量特效的強大工具。透過實際測試,比較免費與付費選項的差異。釋放您的創作潛能,今天就開始打造史詩級漫畫吧!
15 個工具
xix.ai
商業
最佳 AI 支出追蹤工具:掃描收據並自動分類公司開支
2026 年最新最佳 AI 報銷管理工具:備受好評的解決方案,可自動掃描收據並分類企業支出。探索強大且顛覆傳統的解決方案,助您輕鬆管理報銷、精準追蹤財務,並簡化合規流程。我們精心整理並每週更新的免費與付費方案比較指南,將協助您找到最合適的選擇。透過 XIX.AI 的專家精選,釋放您的 AI 優勢。
10 個工具
xix.ai
商業
最佳 AI 招聘工具:篩選履歷與自動化安排候選人面試
在 XIX.AI 探索 2026 年最新且評價最高的 AI 招聘工具。我們精心挑選的清單收錄了強大且具顛覆性的解決方案,可協助篩選履歷並自動化安排候選人面試。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即找到最適合您的招聘助手,並優化您的招聘流程!
10 個工具
xix.ai

 評論 (0)
0/500
評論 (0)
0/500
LimX 透過 RealSense 攝影機與 NVIDIA CuVSLAM 展示安全導航技術。來源:RealSense
隨著人形機器人從原型機邁向實際應用,可靠的感知能力已不僅關乎性能,更成為安全性的關鍵。RealSense在本週的 NVIDIA GTC 大會上特別強調了這一點,並展示了與 LimX Dynamics 共同開發的先進導航能力。
「人形機器人需在複雜的三維空間中與人類並肩運作,且所處環境不斷變化,」RealSense 執行長 Nadav Orbach 表示。「若要讓機器人能安全地與人類協作,其感知系統必須超越單純處理原始感測器資料的層面。它們需要像視覺皮質一樣運作,才能在非結構化環境中實現精確定位、避障、地形理解,以及穩定且可預測的移動。」
RealSense 去年從英特爾(Intel Corp.)分拆出來,為自主移動機器人(AMR)、類人型機器人,以及工業自動化、醫療保健和門禁控制等各類應用提供深度相機和視覺系統。這家總部位於加州庫比蒂諾的公司表示,其感知技術能讓機器和實體人工智慧可靠且智慧地在人類世界中導航並進行互動。
RealSense 為類人型機器人提供「視覺皮質」
「賦予機器人視覺的相機、先進感知及推理軟體,不僅是導航或任務執行的工具,」RealSense 解釋道。「它們是類人型機器人的視覺皮質,使其能在人類環境中有效移動、工作及運作。」
該公司聲稱,其在加州聖荷西 GTC 大會上展示的自主類人型機器人導航技術,是業界首創。LimX Dynamics 計畫展示高密度 3D 深度感知技術如何讓腿式機器人能夠安全且可預測地進行定位、建圖與自主導航。
該系統採用搭載 vSLAM(視覺同步定位與建圖)技術的 RealSense 深度相機,並整合 NVIDIA CuVSLAM 的里程計技術。NVIDIA Isaac Lab 加速了這套技術疊層的開發進程,為強化學習與策略訓練提供了高保真度的數位環境。
總部位於中國深圳的 LimX Dynamics 表示,這種「模擬優先」的方法有助於彌合「模擬與現實」之間的鴻溝,使其類人型機器人能在 NVIDIA GTC 實體亮相前,以經證實的安全性掌握複雜的 3D 操作。
類人型機器人需要三維空間導航能力
RealSense 指出,輪式機器人通常在可預測的平坦平面移動,並以速度和效率為優先考量——機器人吸塵器便是最佳例證。
然而,該公司指出,類人型機器人和四足機器人面臨著更大的挑戰。它們在完整的 3D 空間中進行導航,這涉及接觸點的變化和非線性運動。這需要穩定的腳部定位和持續的環境感知能力。
「僅靠編碼器測距與 2D 雷射雷達(LIDAR)——這類技術通常應用於輪式機器人——缺乏實現穩定且安全移動所需的全面 3D 感知能力,」RealSense 強調。「迄今為止,這項限制已阻礙了機器人的部署,迫使許多多足機器人必須依賴遙控操作、近距離監督,或僅能在嚴格受控的環境中運作。」
編者註:RealSense 首席行銷長 Mike Nielsen 將於 2026 年機器人峰會暨博覽會上,參與以「類人型機器人現況」為題的主題座談。
LimX Dynamics 將展示更安全的機器人發展路徑
合作夥伴表示,他們將展示 RealSense 的高密度深度感知技術,結合 NVIDIA 視覺里程計與 cuVSLAM,如何提供場景理解、定位、建圖及導航功能。這使 LimX 的人形機器人能夠在 3D 空間中安全運作。
具體而言,他們闡述了更安全的機器人技術應具備以下要素:
精準的定位與建圖,確保機器人隨時掌握自身位置與周遭環境。避開與人員及移動物體的碰撞。透過對地形、邊緣及高度變化的 3D 感知,實現防跌倒與穩定行走。可預測且符合人類直覺的動作,將突然停下或不規則修正的情況降至最低。「高密度 3D 感知技術也解鎖了過去難以安全執行的全新行為,」RealSense 解釋道。「這些包括樓梯導航、路緣與高度偵測、穿越不平坦地形,以及在共享空間中進行動態障礙物避讓。先進的路徑規劃讓機器人能夠適應不斷變化的狀況,例如移動中的推車、位移的托盤,或是進入其路徑的人員。」
RealSense 表示,LimX Dynamics 的示範凸顯了該公司在更廣泛的機器人生態系統中日益擴大的角色。該公司指出其在深度感測領域十年的創新成果,包括針對近距離與中距離感測所優化的主動式立體視覺技術,以及成熟的軟體開發套件 (SDK) 生態系統。
此外,RealSense 表示,該公司已協助機器人團隊更高效地進行原型開發與規模化生產,並正加速推動類人型系統安全自主駕駛技術的發展。










 Nvidia 的 OpenClaw 變體或許能解決其最大的挑戰:安全性
Nvidia 執行長黃仁勳認為,每家公司都需要一套 OpenClaw 策略——而 Nvidia 已準備好提供這項解決方案。在週一的 GTC 主題演講中,黃仁勳宣布 NVIDIA 已打造出 NemoClaw,這是一個源自廣受歡迎的本地 AI 自主代理程式(OpenClaw)的企業級平台。這個開源平台本質上是整合了企業級安全與隱私功能的 OpenClaw。根據 Nvidia 的說法,目標是將 Open
Nvidia 的 OpenClaw 變體或許能解決其最大的挑戰:安全性
Nvidia 執行長黃仁勳認為,每家公司都需要一套 OpenClaw 策略——而 Nvidia 已準備好提供這項解決方案。在週一的 GTC 主題演講中,黃仁勳宣布 NVIDIA 已打造出 NemoClaw,這是一個源自廣受歡迎的本地 AI 自主代理程式(OpenClaw)的企業級平台。這個開源平台本質上是整合了企業級安全與隱私功能的 OpenClaw。根據 Nvidia 的說法,目標是將 Open
 五角大樓與英偉達、微軟和亞馬遜網路服務公司簽訂了協議,以便在機密網路中部署人工智慧技術。
在此前與谷歌、SpaceX和OpenAI達成協議之後,美國國防部於週五宣佈,它現已與Nvidia、微軟、亞馬遜網路服務和Reflection AI簽訂了合同,這些公司將會將其人工智慧技術和模型部署在保密網路上,用於“合法的操作用途”。宣告中還指出:“這些協議加速了將美國軍隊建設成為以人工智慧為核心作戰力量的程序,並將增強我們的戰士在所有戰爭領域保持決策優勢的能力。”這些協議的簽署,正值五角大樓試圖在與Anthropic就使用條款發生爭議後,多元化其人工智慧供應商的選擇。五角大樓希望無限制地使
五角大樓與英偉達、微軟和亞馬遜網路服務公司簽訂了協議,以便在機密網路中部署人工智慧技術。
在此前與谷歌、SpaceX和OpenAI達成協議之後,美國國防部於週五宣佈,它現已與Nvidia、微軟、亞馬遜網路服務和Reflection AI簽訂了合同,這些公司將會將其人工智慧技術和模型部署在保密網路上,用於“合法的操作用途”。宣告中還指出:“這些協議加速了將美國軍隊建設成為以人工智慧為核心作戰力量的程序,並將增強我們的戰士在所有戰爭領域保持決策優勢的能力。”這些協議的簽署,正值五角大樓試圖在與Anthropic就使用條款發生爭議後,多元化其人工智慧供應商的選擇。五角大樓希望無限制地使
 Nvidia GTC 發表 NemoClaw、機器人奧拉夫,以及一兆美元的豪賭
正在載入播放器……執行長黃仁勳本週身穿招牌皮夾克登上 Nvidia GTC 大會的舞台,發表了一場長達兩小時半的主題演說。他在演說中預測,至 2027 年人工智慧晶片銷售額將達到 1 兆美元,並宣稱每家公司都需要一套「OpenClaw 策略」,最後則以一段語無倫次的 Olaf 機器人表演作為結尾,甚至不得不切斷其麥克風。 訊息不言而喻:Nvidia 希望成為一切的基石,從 AI 訓練到自動駕駛汽車
Nvidia GTC 發表 NemoClaw、機器人奧拉夫,以及一兆美元的豪賭
正在載入播放器……執行長黃仁勳本週身穿招牌皮夾克登上 Nvidia GTC 大會的舞台,發表了一場長達兩小時半的主題演說。他在演說中預測,至 2027 年人工智慧晶片銷售額將達到 1 兆美元,並宣稱每家公司都需要一套「OpenClaw 策略」,最後則以一段語無倫次的 Olaf 機器人表演作為結尾,甚至不得不切斷其麥克風。 訊息不言而喻:Nvidia 希望成為一切的基石,從 AI 訓練到自動駕駛汽車
立即在 XIX.AI 探索 2026 年最佳 AI 定價優化軟體。我們精心挑選的清單收錄了備受好評、能徹底改變遊戲規則的工具,這些工具不僅能追蹤競爭對手,還能自動調整您的商店價格,以實現利潤最大化。透過實際測試,比較免費與付費方案的差異。立即掌握您的定價優勢。
10 個工具
xix.ai
立即在 XIX.AI 探索 2026 年最佳 AI 程式碼審查工具。我們精心挑選的清單收錄了備受好評、能徹底改變遊戲規則的工具,可自動確保程式碼符合規範,並重構舊版儲存庫檔案。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即掌握您的 AI 競爭優勢。
10 個工具
xix.ai
探索 2026 年最新精選、專為閱讀障礙者設計的頂級 AI 語音合成(TTS)應用程式。我們的專家評比將免費與付費工具進行對照,重點介紹能提升閱讀效率與學習成效的強大功能。發掘這些必試且能帶來革命性改變的解決方案,釋放學生的潛能。立即前往 XIX.AI 展開您的探索之旅。
10 個工具
xix.ai
立即前往 XIX.AI,探索 2026 年最優秀的少年漫畫 AI 生成工具。我們精心挑選的頂級清單,匯集了能打造高張力動作場面與動態能量特效的強大工具。透過實際測試,比較免費與付費選項的差異。釋放您的創作潛能,今天就開始打造史詩級漫畫吧!
15 個工具
xix.ai

2026 年最新最佳 AI 報銷管理工具:備受好評的解決方案,可自動掃描收據並分類企業支出。探索強大且顛覆傳統的解決方案,助您輕鬆管理報銷、精準追蹤財務,並簡化合規流程。我們精心整理並每週更新的免費與付費方案比較指南,將協助您找到最合適的選擇。透過 XIX.AI 的專家精選,釋放您的 AI 優勢。
10 個工具
xix.ai

在 XIX.AI 探索 2026 年最新且評價最高的 AI 招聘工具。我們精心挑選的清單收錄了強大且具顛覆性的解決方案,可協助篩選履歷並自動化安排候選人面試。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即找到最適合您的招聘助手,並優化您的招聘流程!
10 個工具
xix.ai













