
















 Hogar
Hogar
Intel RealSense presenta en la GTC un sistema de navegación autónomo para robots humanoides
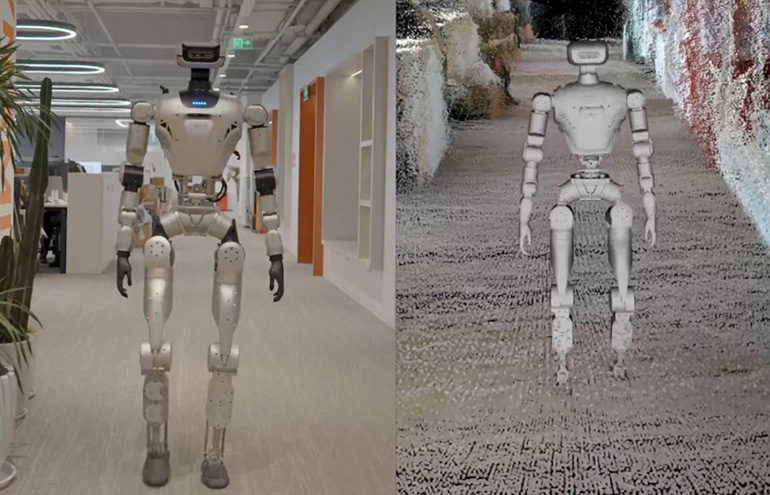
LimX demuestra una navegación segura con cámaras RealSense y NVIDIA CuVSLAM. Fuente: RealSense
A medida que los robots humanoides pasan de ser prototipos a aplicaciones prácticas, una percepción fiable se vuelve fundamental para la seguridad, no solo para el rendimiento. RealSense hizo hincapié en este punto en la NVIDIA GTC de esta semana, mostrando capacidades avanzadas de navegación desarrolladas con LimX Dynamics.
«Los humanoides operan en espacios tridimensionales complejos junto a personas, en entornos que cambian constantemente», afirmó Nadav Orbach, director ejecutivo de RealSense. «Para que los robots trabajen de forma segura con los humanos, sus sistemas de percepción deben hacer algo más que procesar datos brutos de los sensores. Deben funcionar como una corteza visual, permitiendo una localización precisa, la evitación de obstáculos, la comprensión del terreno y un movimiento estable y predecible en entornos no estructurados».
RealSense, que se escindió de Intel Corp. el año pasado, ofrece cámaras de profundidad y sistemas de visión para robots móviles autónomos (AMR), humanoides y diversas aplicaciones en automatización industrial, atención sanitaria y control de acceso. La empresa, con sede en Cupertino (California), afirmó que su tecnología de percepción permite a las máquinas y a la IA física navegar e interactuar con el mundo humano de forma fiable e inteligente.
RealSense ofrece una «corteza visual» para robots humanoides
«Las cámaras, la percepción avanzada y el software de razonamiento que dotan de visión a los robots son más que simples herramientas de navegación o de ejecución de tareas», explicó RealSense. «Sirven como corteza visual para los humanoides, permitiéndoles moverse, trabajar y operar de forma eficaz en entornos humanos».
La empresa afirma que su demostración de navegación autónoma de humanoides en la GTC de San José, California, es una primicia en el sector. LimX Dynamics tiene previsto mostrar cómo la percepción de profundidad 3D densa permite a los robots con patas localizarse, cartografiar y navegar de forma autónoma con seguridad y previsibilidad.
Su sistema utiliza cámaras de profundidad RealSense con vSLAM (localización y cartografía simultáneas visuales), integradas con la odometría de NVIDIA CuVSLAM. NVIDIA Isaac Lab aceleró el desarrollo de esta pila tecnológica, proporcionando un entorno digital de alta fidelidad para el aprendizaje por refuerzo y el entrenamiento de políticas.
LimX Dynamics, con sede en Shenzhen (China), afirmó que este enfoque centrado en la simulación ayudó a salvar la brecha entre «la simulación y la realidad», permitiendo a su humanoide dominar maniobras 3D complejas con seguridad verificada antes de su debut físico en NVIDIA GTC.
Los humanoides necesitan navegar por espacios 3D
Los robots con ruedas suelen moverse sobre un plano predecible y llano, dando prioridad a la velocidad y la eficiencia; los robots aspiradores son un ejemplo paradigmático, según RealSense.
Sin embargo, los humanoides y los cuadrúpedos plantean un reto mucho mayor, señaló la empresa. Se desplazan por espacios totalmente 3D, lo que implica puntos de contacto cambiantes y movimientos no lineales. Esto exige una colocación estable de los pies y una conciencia constante del entorno.
«La odometría basada únicamente en encoders y el lidar 2D, que se utilizan habitualmente en los robots con ruedas, carecen de la percepción 3D completa necesaria para un movimiento estable y seguro», afirma RealSense. «Hasta ahora, esta limitación ha restringido su implementación, lo que ha obligado a muchos robots con patas a depender de la teleoperación, una supervisión estrecha o entornos estrictamente controlados».
Nota del editor: Mike Nielsen, director de marketing de RealSense, participará en una mesa redonda sobre «El estado de los humanoides» en la Robotics Summit & Expo 2026.
LimX Dynamics demostrará un camino más seguro para la robótica
Los socios afirmaron que demostrarán cómo la percepción de profundidad densa de RealSense, combinada con la odometría visual de NVIDIA y cuVSLAM, proporciona comprensión de la escena, localización, cartografía y navegación. Esto permite que el humanoide de LimX opere de forma segura en el espacio 3D.
En términos prácticos, destacaron que una robótica más segura implica:
Localización y cartografía precisas, garantizando que el robot conozca siempre su posición y su entorno. Evitación de colisiones con personas y objetos en movimiento. Prevención de caídas y locomoción estable mediante la percepción 3D del terreno, los bordes y los cambios de altura. Movimiento predecible y comprensible para los humanos, minimizando las paradas bruscas o las correcciones erráticas.«La percepción 3D densa también permite nuevos comportamientos que históricamente han sido difíciles de ejecutar con seguridad», explicó RealSense. «Entre ellos se incluyen la navegación por escaleras, la detección de bordillos y desniveles, el desplazamiento por terrenos irregulares y la evitación dinámica de obstáculos en espacios compartidos. La planificación avanzada de rutas permite a los robots adaptarse a condiciones cambiantes, como carros en movimiento, palés que se desplazan o personas que se cruzan en su camino».
RealSense afirmó que la demostración de LimX Dynamics pone de relieve su papel cada vez más importante en el ecosistema robótico en general. La empresa destacó una década de innovación en la detección de profundidad, incluida la tecnología estéreo activa optimizada para la detección de corto y medio alcance, y un ecosistema maduro de kits de desarrollo de software (SDK).
Además, RealSense afirmó que ha ayudado a los equipos de robótica a crear prototipos y escalar de forma más eficiente, y que está acelerando el desarrollo de la autonomía segura para los sistemas humanoides.
Artículo relacionado
 La variante OpenClaw de Nvidia podría resolver su mayor reto: la seguridad
El director ejecutivo de Nvidia, Jensen Huang, cree que todas las empresas necesitan una estrategia OpenClaw, y Nvidia está preparada para ofrecerla.Durante su discurso inaugural en la GTC el lunes, H
El Pentágono firma acuerdos con Nvidia, Microsoft y AWS para implementar inteligencia artificial en redes clasificadas.
Después de haber alcanzado acuerdos previamente con Google, SpaceX y OpenAI, el Departamento de Defensa de los Estados Unidos anunció el viernes que ha firmado contratos con Nvidia, Microsoft, Amazon Web Services y Reflection AI para utilizar sus tec
La GTC de Nvidia presenta NemoClaw, el robot Olaf y una apuesta de un billón de dólares
Cargando el reproductor…El director ejecutivo Jensen Huang subió al escenario en la conferencia GTC de Nvidia celebrada esta semana con su característica chaqueta de cuero para pronunciar un discurso
Recomendaciones de temas especiales relacionados
Creación de cómics
La variante OpenClaw de Nvidia podría resolver su mayor reto: la seguridad
El director ejecutivo de Nvidia, Jensen Huang, cree que todas las empresas necesitan una estrategia OpenClaw, y Nvidia está preparada para ofrecerla.Durante su discurso inaugural en la GTC el lunes, H
El Pentágono firma acuerdos con Nvidia, Microsoft y AWS para implementar inteligencia artificial en redes clasificadas.
Después de haber alcanzado acuerdos previamente con Google, SpaceX y OpenAI, el Departamento de Defensa de los Estados Unidos anunció el viernes que ha firmado contratos con Nvidia, Microsoft, Amazon Web Services y Reflection AI para utilizar sus tec
La GTC de Nvidia presenta NemoClaw, el robot Olaf y una apuesta de un billón de dólares
Cargando el reproductor…El director ejecutivo Jensen Huang subió al escenario en la conferencia GTC de Nvidia celebrada esta semana con su característica chaqueta de cuero para pronunciar un discurso
Recomendaciones de temas especiales relacionados
Creación de cómics
 Los mejores generadores de IA para manga shonen: crea secuencias de acción trepidantes y efectos de energía
Los mejores generadores de IA para manga shonen: crea secuencias de acción trepidantes y efectos de energía
Descubre los mejores generadores de IA para manga shonen de 2026 en XIX.AI. Nuestra lista, cuidadosamente seleccionada y con las mejores valoraciones, incluye potentes herramientas para crear secuencias de acción trepidantes y efectos energéticos dinámicos. Compara las opciones gratuitas con las de pago mediante pruebas reales. ¡Libera tu potencial creativo y empieza a crear manga épico hoy mismo!
 15 herramientas
15 herramientas
 xix.ai
Negocio
Los mejores gestores de gastos con IA: escanea recibos y clasifica automáticamente los gastos de la empresa
xix.ai
Negocio
Los mejores gestores de gastos con IA: escanea recibos y clasifica automáticamente los gastos de la empresa
Los mejores gestores de gastos con IA de 2026: las herramientas mejor valoradas para escanear recibos y clasificar automáticamente los gastos de la empresa. Descubre soluciones potentes y revolucionarias para una gestión de gastos sin esfuerzo, un seguimiento financiero preciso y un cumplimiento normativo optimizado. Nuestra comparativa, seleccionada y actualizada semanalmente, entre opciones gratuitas y de pago te ayuda a encontrar la que mejor se adapta a tus necesidades. Aprovecha al máximo las ventajas de la IA con las recomendaciones de los expertos de XIX.AI.
10 herramientas
xix.ai
Negocio
Las mejores herramientas de selección de personal basadas en IA: filtrar currículos y automatizar la programación de entrevistas con los candidatos
Descubre las mejores herramientas de selección de personal basadas en IA de 2026 en XIX.AI. Nuestra lista, cuidadosamente seleccionada, incluye soluciones potentes y revolucionarias para la selección de currículos y la automatización de la programación de entrevistas con los candidatos. Compara las opciones gratuitas con las de pago gracias a pruebas reales y a clasificaciones que se actualizan semanalmente. ¡Encuentra tu asistente de selección de personal ideal y optimiza tu proceso de selección hoy mismo!
10 herramientas
xix.ai
Productividad
Entrenadores personales de bienestar y concentración basados en IA: controla el agotamiento y aumenta tus niveles de energía mental
Descubre los mejores entrenadores personales de bienestar y concentración basados en IA de 2026 en XIX.AI. Nuestras clasificaciones, cuidadosamente seleccionadas, incluyen herramientas revolucionarias y de primera categoría para gestionar el agotamiento y potenciar la energía mental. Compara las opciones gratuitas con las de pago gracias a información basada en casos reales. Descubre hoy mismo el camino hacia la máxima productividad y el bienestar.
10 herramientas
xix.ai
chatbot
Los mejores chatbots románticos con IA: crea relaciones duraderas con personalidades coherentes
Descubre los mejores chatbots románticos con IA de 2026 para establecer relaciones auténticas y duraderas. Nuestra lista seleccionada incluye personalidades sólidas y coherentes, comparativas entre versiones gratuitas y de pago, y pruebas en situaciones reales. Encuentra a tu compañero ideal y empieza a construir tu relación hoy mismo en XIX.AI.
10 herramientas
xix.ai
Educación y aprendizaje
Los mejores mentores en ciencia de datos y IA: dominan SQL, Pandas y flujos de trabajo de aprendizaje automático.
Descubra a los mejores mentores en ciencia de datos y AI de 2026 para dominar SQL, Pandas y flujos de trabajo de aprendizaje automático. Explore nuestra selección cuidadosamente seleccionada y altamente valorada en XIX.AI para obtener orientación poderosa que cambie completamente la situación. Compare las opciones gratuitas con las pagadas y obtenga información basada en casos reales. Desbloquee su dominio de la ciencia de datos hoy mismo.
10 herramientas
xix.ai

 comentario (0)
0/500
comentario (0)
0/500
LimX demuestra una navegación segura con cámaras RealSense y NVIDIA CuVSLAM. Fuente: RealSense
A medida que los robots humanoides pasan de ser prototipos a aplicaciones prácticas, una percepción fiable se vuelve fundamental para la seguridad, no solo para el rendimiento. RealSense hizo hincapié en este punto en la NVIDIA GTC de esta semana, mostrando capacidades avanzadas de navegación desarrolladas con LimX Dynamics.
«Los humanoides operan en espacios tridimensionales complejos junto a personas, en entornos que cambian constantemente», afirmó Nadav Orbach, director ejecutivo de RealSense. «Para que los robots trabajen de forma segura con los humanos, sus sistemas de percepción deben hacer algo más que procesar datos brutos de los sensores. Deben funcionar como una corteza visual, permitiendo una localización precisa, la evitación de obstáculos, la comprensión del terreno y un movimiento estable y predecible en entornos no estructurados».
RealSense, que se escindió de Intel Corp. el año pasado, ofrece cámaras de profundidad y sistemas de visión para robots móviles autónomos (AMR), humanoides y diversas aplicaciones en automatización industrial, atención sanitaria y control de acceso. La empresa, con sede en Cupertino (California), afirmó que su tecnología de percepción permite a las máquinas y a la IA física navegar e interactuar con el mundo humano de forma fiable e inteligente.
RealSense ofrece una «corteza visual» para robots humanoides
«Las cámaras, la percepción avanzada y el software de razonamiento que dotan de visión a los robots son más que simples herramientas de navegación o de ejecución de tareas», explicó RealSense. «Sirven como corteza visual para los humanoides, permitiéndoles moverse, trabajar y operar de forma eficaz en entornos humanos».
La empresa afirma que su demostración de navegación autónoma de humanoides en la GTC de San José, California, es una primicia en el sector. LimX Dynamics tiene previsto mostrar cómo la percepción de profundidad 3D densa permite a los robots con patas localizarse, cartografiar y navegar de forma autónoma con seguridad y previsibilidad.
Su sistema utiliza cámaras de profundidad RealSense con vSLAM (localización y cartografía simultáneas visuales), integradas con la odometría de NVIDIA CuVSLAM. NVIDIA Isaac Lab aceleró el desarrollo de esta pila tecnológica, proporcionando un entorno digital de alta fidelidad para el aprendizaje por refuerzo y el entrenamiento de políticas.
LimX Dynamics, con sede en Shenzhen (China), afirmó que este enfoque centrado en la simulación ayudó a salvar la brecha entre «la simulación y la realidad», permitiendo a su humanoide dominar maniobras 3D complejas con seguridad verificada antes de su debut físico en NVIDIA GTC.
Los humanoides necesitan navegar por espacios 3D
Los robots con ruedas suelen moverse sobre un plano predecible y llano, dando prioridad a la velocidad y la eficiencia; los robots aspiradores son un ejemplo paradigmático, según RealSense.
Sin embargo, los humanoides y los cuadrúpedos plantean un reto mucho mayor, señaló la empresa. Se desplazan por espacios totalmente 3D, lo que implica puntos de contacto cambiantes y movimientos no lineales. Esto exige una colocación estable de los pies y una conciencia constante del entorno.
«La odometría basada únicamente en encoders y el lidar 2D, que se utilizan habitualmente en los robots con ruedas, carecen de la percepción 3D completa necesaria para un movimiento estable y seguro», afirma RealSense. «Hasta ahora, esta limitación ha restringido su implementación, lo que ha obligado a muchos robots con patas a depender de la teleoperación, una supervisión estrecha o entornos estrictamente controlados».
Nota del editor: Mike Nielsen, director de marketing de RealSense, participará en una mesa redonda sobre «El estado de los humanoides» en la Robotics Summit & Expo 2026.
LimX Dynamics demostrará un camino más seguro para la robótica
Los socios afirmaron que demostrarán cómo la percepción de profundidad densa de RealSense, combinada con la odometría visual de NVIDIA y cuVSLAM, proporciona comprensión de la escena, localización, cartografía y navegación. Esto permite que el humanoide de LimX opere de forma segura en el espacio 3D.
En términos prácticos, destacaron que una robótica más segura implica:
Localización y cartografía precisas, garantizando que el robot conozca siempre su posición y su entorno. Evitación de colisiones con personas y objetos en movimiento. Prevención de caídas y locomoción estable mediante la percepción 3D del terreno, los bordes y los cambios de altura. Movimiento predecible y comprensible para los humanos, minimizando las paradas bruscas o las correcciones erráticas.«La percepción 3D densa también permite nuevos comportamientos que históricamente han sido difíciles de ejecutar con seguridad», explicó RealSense. «Entre ellos se incluyen la navegación por escaleras, la detección de bordillos y desniveles, el desplazamiento por terrenos irregulares y la evitación dinámica de obstáculos en espacios compartidos. La planificación avanzada de rutas permite a los robots adaptarse a condiciones cambiantes, como carros en movimiento, palés que se desplazan o personas que se cruzan en su camino».
RealSense afirmó que la demostración de LimX Dynamics pone de relieve su papel cada vez más importante en el ecosistema robótico en general. La empresa destacó una década de innovación en la detección de profundidad, incluida la tecnología estéreo activa optimizada para la detección de corto y medio alcance, y un ecosistema maduro de kits de desarrollo de software (SDK).
Además, RealSense afirmó que ha ayudado a los equipos de robótica a crear prototipos y escalar de forma más eficiente, y que está acelerando el desarrollo de la autonomía segura para los sistemas humanoides.










 La variante OpenClaw de Nvidia podría resolver su mayor reto: la seguridad
El director ejecutivo de Nvidia, Jensen Huang, cree que todas las empresas necesitan una estrategia OpenClaw, y Nvidia está preparada para ofrecerla.Durante su discurso inaugural en la GTC el lunes, H
La variante OpenClaw de Nvidia podría resolver su mayor reto: la seguridad
El director ejecutivo de Nvidia, Jensen Huang, cree que todas las empresas necesitan una estrategia OpenClaw, y Nvidia está preparada para ofrecerla.Durante su discurso inaugural en la GTC el lunes, H
 El Pentágono firma acuerdos con Nvidia, Microsoft y AWS para implementar inteligencia artificial en redes clasificadas.
Después de haber alcanzado acuerdos previamente con Google, SpaceX y OpenAI, el Departamento de Defensa de los Estados Unidos anunció el viernes que ha firmado contratos con Nvidia, Microsoft, Amazon Web Services y Reflection AI para utilizar sus tec
El Pentágono firma acuerdos con Nvidia, Microsoft y AWS para implementar inteligencia artificial en redes clasificadas.
Después de haber alcanzado acuerdos previamente con Google, SpaceX y OpenAI, el Departamento de Defensa de los Estados Unidos anunció el viernes que ha firmado contratos con Nvidia, Microsoft, Amazon Web Services y Reflection AI para utilizar sus tec
 La GTC de Nvidia presenta NemoClaw, el robot Olaf y una apuesta de un billón de dólares
Cargando el reproductor…El director ejecutivo Jensen Huang subió al escenario en la conferencia GTC de Nvidia celebrada esta semana con su característica chaqueta de cuero para pronunciar un discurso
La GTC de Nvidia presenta NemoClaw, el robot Olaf y una apuesta de un billón de dólares
Cargando el reproductor…El director ejecutivo Jensen Huang subió al escenario en la conferencia GTC de Nvidia celebrada esta semana con su característica chaqueta de cuero para pronunciar un discurso
Descubre los mejores generadores de IA para manga shonen de 2026 en XIX.AI. Nuestra lista, cuidadosamente seleccionada y con las mejores valoraciones, incluye potentes herramientas para crear secuencias de acción trepidantes y efectos energéticos dinámicos. Compara las opciones gratuitas con las de pago mediante pruebas reales. ¡Libera tu potencial creativo y empieza a crear manga épico hoy mismo!
15 herramientas
xix.ai

Los mejores gestores de gastos con IA de 2026: las herramientas mejor valoradas para escanear recibos y clasificar automáticamente los gastos de la empresa. Descubre soluciones potentes y revolucionarias para una gestión de gastos sin esfuerzo, un seguimiento financiero preciso y un cumplimiento normativo optimizado. Nuestra comparativa, seleccionada y actualizada semanalmente, entre opciones gratuitas y de pago te ayuda a encontrar la que mejor se adapta a tus necesidades. Aprovecha al máximo las ventajas de la IA con las recomendaciones de los expertos de XIX.AI.
10 herramientas
xix.ai

Descubre las mejores herramientas de selección de personal basadas en IA de 2026 en XIX.AI. Nuestra lista, cuidadosamente seleccionada, incluye soluciones potentes y revolucionarias para la selección de currículos y la automatización de la programación de entrevistas con los candidatos. Compara las opciones gratuitas con las de pago gracias a pruebas reales y a clasificaciones que se actualizan semanalmente. ¡Encuentra tu asistente de selección de personal ideal y optimiza tu proceso de selección hoy mismo!
10 herramientas
xix.ai

Descubre los mejores entrenadores personales de bienestar y concentración basados en IA de 2026 en XIX.AI. Nuestras clasificaciones, cuidadosamente seleccionadas, incluyen herramientas revolucionarias y de primera categoría para gestionar el agotamiento y potenciar la energía mental. Compara las opciones gratuitas con las de pago gracias a información basada en casos reales. Descubre hoy mismo el camino hacia la máxima productividad y el bienestar.
10 herramientas
xix.ai

Descubre los mejores chatbots románticos con IA de 2026 para establecer relaciones auténticas y duraderas. Nuestra lista seleccionada incluye personalidades sólidas y coherentes, comparativas entre versiones gratuitas y de pago, y pruebas en situaciones reales. Encuentra a tu compañero ideal y empieza a construir tu relación hoy mismo en XIX.AI.
10 herramientas
xix.ai

Descubra a los mejores mentores en ciencia de datos y AI de 2026 para dominar SQL, Pandas y flujos de trabajo de aprendizaje automático. Explore nuestra selección cuidadosamente seleccionada y altamente valorada en XIX.AI para obtener orientación poderosa que cambie completamente la situación. Compare las opciones gratuitas con las pagadas y obtenga información basada en casos reales. Desbloquee su dominio de la ciencia de datos hoy mismo.
10 herramientas
xix.ai













