
















 Lar
LarIntel RealSense apresenta navegação autônoma para robôs humanóides na GTC
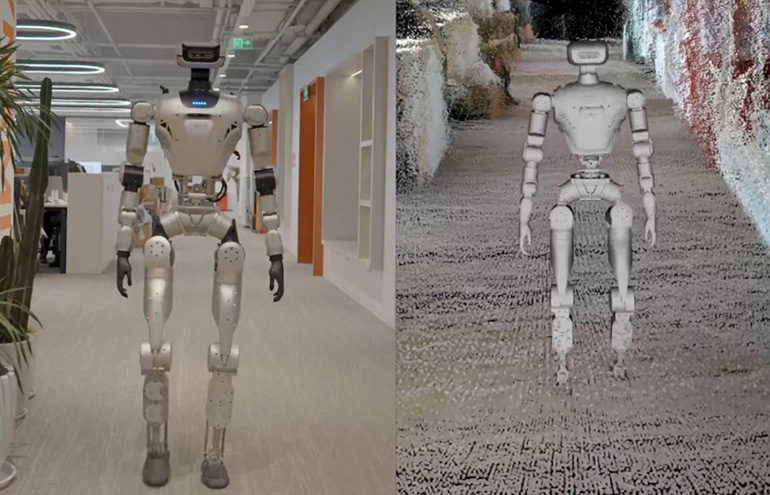
A LimX demonstra navegação segura com câmeras RealSense e o NVIDIA CuVSLAM. Fonte: RealSense
À medida que os robôs humanóides passam de protótipos para aplicações práticas, a percepção confiável torna-se fundamental para a segurança, e não apenas para o desempenho. A RealSense enfatizou esse ponto na NVIDIA GTC nesta semana, apresentando recursos avançados de navegação desenvolvidos com a LimX Dynamics.
“Os humanóides operam em espaços tridimensionais complexos ao lado de pessoas, em ambientes que estão em constante mudança”, disse Nadav Orbach, CEO da RealSense. “Para que os robôs trabalhem com segurança junto a humanos, seus sistemas de percepção devem fazer mais do que apenas processar dados brutos de sensores. Eles precisam funcionar como um córtex visual, permitindo localização precisa, prevenção de obstáculos, compreensão do terreno e movimentos estáveis e previsíveis em ambientes não estruturados.”
Criada a partir da Intel Corp. no ano passado, a RealSense fornece câmeras de profundidade e sistemas de visão para robôs móveis autônomos (AMRs), humanóides e diversas aplicações em automação industrial, saúde e controle de acesso. A empresa sediada em Cupertino, Califórnia, afirmou que sua tecnologia de percepção permite que máquinas e IA física naveguem e interajam com o mundo humano de forma confiável e inteligente.
RealSense oferece “córtex visual” para robôs humanóides
“As câmeras, a percepção avançada e o software de raciocínio que dão visão aos robôs são mais do que apenas ferramentas de navegação ou execução de tarefas”, explicou a RealSense. “Eles funcionam como o córtex visual para humanóides, permitindo que se movam, trabalhem e operem de forma eficaz em ambientes humanos.”
A empresa afirma que sua demonstração de navegação autônoma de humanóides na GTC em San Jose, Califórnia, é uma novidade no setor. A LimX Dynamics planeja mostrar como a percepção de profundidade 3D densa permite que robôs com pernas localizem, mapeiem e naveguem de forma autônoma com segurança e previsibilidade.
Seu sistema utiliza câmeras de profundidade RealSense com vSLAM (localização e mapeamento visuais simultâneos), integradas à odometria do NVIDIA CuVSLAM. O NVIDIA Isaac Lab acelerou o desenvolvimento dessa pilha de tecnologia, fornecendo um ambiente digital de alta fidelidade para aprendizado por reforço e treinamento de políticas.
A LimX Dynamics, com sede em Shenzhen, na China, afirmou que essa abordagem centrada na simulação ajudou a preencher a lacuna entre “simulação e realidade”, permitindo que seu humanóide dominasse manobras 3D complexas com segurança comprovada antes de sua estreia física na NVIDIA GTC.
Os humanóides precisam de navegação em espaços 3D
Robôs com rodas normalmente se movem em um plano previsível e plano, priorizando velocidade e eficiência — aspiradores robóticos são um excelente exemplo, de acordo com a RealSense.
No entanto, os humanóides e os quadrúpedes representam um desafio muito maior, observou a empresa. Eles navegam em espaços 3D completos, o que envolve pontos de contato variáveis e movimentos não lineares. Isso exige um posicionamento estável dos pés e uma percepção ambiental constante.
“A odometria baseada apenas em encoders e o lidar 2D, comumente usados em robôs com rodas, carecem da percepção 3D abrangente necessária para um movimento estável e seguro”, afirmou a RealSense. “Até agora, essa limitação restringiu a implantação, forçando muitos robôs com pernas a depender de teleoperação, supervisão rigorosa ou ambientes estritamente controlados.”
Nota do editor: Mike Nielsen, diretor de marketing da RealSense, participará de um painel principal sobre “O estado dos humanóides” na Robotics Summit & Expo 2026.
LimX Dynamics demonstrará um caminho mais seguro para a robótica
Os parceiros afirmaram que demonstrarão como a percepção de profundidade densa da RealSense, combinada com a odometria visual da NVIDIA e o cuVSLAM, proporciona compreensão da cena, localização, mapeamento e navegação. Isso permite que o humanóide da LimX opere com segurança no espaço 3D.
Em termos práticos, eles destacaram que uma robótica mais segura envolve:
Localização e mapeamento precisos, garantindo que o robô sempre saiba sua posição e o ambiente ao redor.Prevenção de colisões com pessoas e objetos em movimento.Prevenção de quedas e locomoção estável por meio da percepção 3D do terreno, bordas e mudanças de altura.Movimentos previsíveis e compreensíveis para humanos, minimizando paradas bruscas ou correções erráticas.“A percepção 3D densa também possibilita novos comportamentos que historicamente têm sido difíceis de executar com segurança”, explicou a RealSense. “Isso inclui navegação em escadas, detecção de meio-fio e elevação, travessia de terrenos irregulares e prevenção dinâmica de obstáculos em espaços compartilhados. O planejamento avançado de trajetória permite que os robôs se adaptem a condições variáveis, como carrinhos em movimento, paletes em deslocamento ou pessoas entrando em seu caminho.”
A RealSense afirmou que a demonstração da LimX Dynamics destaca seu papel cada vez mais importante no ecossistema mais amplo da robótica. A empresa destacou uma década de inovação em sensoriamento de profundidade, incluindo tecnologia estéreo ativa otimizada para sensoriamento de curto e médio alcance, e um ecossistema maduro de kits de desenvolvimento de software (SDK).
Além disso, a RealSense afirmou que tem auxiliado equipes de robótica na prototipagem e na escalabilidade de forma mais eficiente e está acelerando o desenvolvimento de autonomia segura para sistemas humanóides.
Artigo relacionado
 A variante OpenClaw da Nvidia pode resolver seu maior desafio: a segurança
O CEO da Nvidia, Jensen Huang, acredita que toda empresa precisa de uma estratégia OpenClaw — e a Nvidia está pronta para fornecê-la.Durante sua palestra na GTC na segunda-feira, Huang anunciou que a
O Pentágono assinou acordos com a Nvidia, a Microsoft e a AWS para implementar inteligência artificial em redes confidenciais.
Após alcançar acordos anteriores com a Google, a SpaceX e a OpenAI, o Departamento de Defesa dos EUA anunciou na sexta-feira que assinou contratos com a Nvidia, a Microsoft, a Amazon Web Services e a Reflection AI para utilizar suas tecnologias e mod
A Nvidia GTC apresenta o NemoClaw, o robô Olaf e uma aposta de US$ 1 trilhão
Carregando o player…O CEO Jensen Huang subiu ao palco na conferência GTC da Nvidia nesta semana, vestindo sua jaqueta de couro característica, para proferir uma palestra de duas horas e meia, projetan
Recomendações de tópicos especiais relacionados
Criação de quadrinhos
A variante OpenClaw da Nvidia pode resolver seu maior desafio: a segurança
O CEO da Nvidia, Jensen Huang, acredita que toda empresa precisa de uma estratégia OpenClaw — e a Nvidia está pronta para fornecê-la.Durante sua palestra na GTC na segunda-feira, Huang anunciou que a
O Pentágono assinou acordos com a Nvidia, a Microsoft e a AWS para implementar inteligência artificial em redes confidenciais.
Após alcançar acordos anteriores com a Google, a SpaceX e a OpenAI, o Departamento de Defesa dos EUA anunciou na sexta-feira que assinou contratos com a Nvidia, a Microsoft, a Amazon Web Services e a Reflection AI para utilizar suas tecnologias e mod
A Nvidia GTC apresenta o NemoClaw, o robô Olaf e uma aposta de US$ 1 trilhão
Carregando o player…O CEO Jensen Huang subiu ao palco na conferência GTC da Nvidia nesta semana, vestindo sua jaqueta de couro característica, para proferir uma palestra de duas horas e meia, projetan
Recomendações de tópicos especiais relacionados
Criação de quadrinhos
 Os melhores geradores de IA para mangás shonen: crie sequências de ação cheias de adrenalina e efeitos de energia
Os melhores geradores de IA para mangás shonen: crie sequências de ação cheias de adrenalina e efeitos de energia
Descubra os melhores geradores de IA para mangás shonen de 2026 no XIX.AI. Nossa lista selecionada e com as melhores avaliações apresenta ferramentas poderosas para criar sequências de ação cheias de adrenalina e efeitos dinâmicos de energia. Compare opções gratuitas e pagas com testes práticos. Liberte seu potencial criativo e comece a criar mangás épicos hoje mesmo!
 15 ferramentas
15 ferramentas
 xix.ai
Negócios
Os melhores aplicativos de controle de despesas com IA: digitalize recibos e categorize automaticamente as despesas corporativas
xix.ai
Negócios
Os melhores aplicativos de controle de despesas com IA: digitalize recibos e categorize automaticamente as despesas corporativas
Os melhores gerenciadores de despesas com IA de 2026: as ferramentas mais bem avaliadas para digitalizar recibos e categorizar despesas corporativas automaticamente. Descubra soluções poderosas e revolucionárias para uma gestão de despesas sem esforço, um acompanhamento financeiro preciso e uma conformidade simplificada. Nossa comparação, cuidadosamente selecionada e atualizada semanalmente, entre opções gratuitas e pagas ajuda você a encontrar a solução ideal. Aproveite ao máximo as vantagens da IA com as recomendações dos especialistas da XIX.AI.
10 ferramentas
xix.ai
Negócios
As melhores ferramentas de recrutamento com IA: analise currículos e automatize o agendamento de entrevistas com candidatos
Descubra as melhores ferramentas de recrutamento com IA de 2026 no XIX.AI. Nossa lista selecionada apresenta soluções poderosas e revolucionárias para a triagem de currículos e a automação do agendamento de entrevistas com candidatos. Compare opções gratuitas e pagas com testes práticos e rankings atualizados semanalmente. Encontre o seu assistente de contratação ideal e otimize seu processo de recrutamento hoje mesmo!
10 ferramentas
xix.ai
Produtividade
Treinadores de bem-estar e concentração com IA: controle o esgotamento e aumente os níveis de energia mental
Descubra os melhores coaches de bem-estar pessoal e concentração com IA de 2026 no XIX.AI. Nossos rankings selecionados apresentam ferramentas de ponta e revolucionárias para lidar com o esgotamento e aumentar a energia mental. Compare opções gratuitas e pagas com informações reais. Descubra hoje mesmo o caminho para atingir o máximo de produtividade e bem-estar.
10 ferramentas
xix.ai
chatbot
Os melhores chatbots românticos com IA: construa relacionamentos duradouros com personalidades consistentes
Descubra os melhores chatbots românticos com IA de 2026 para construir relacionamentos genuínos e duradouros. Nossa lista selecionada apresenta personalidades marcantes e consistentes, comparações entre versões gratuitas e pagas, além de testes práticos. Encontre seu companheiro ideal e comece a construir seu relacionamento hoje mesmo no XIX.AI.
10 ferramentas
xix.ai
Educação e Aprendizagem
Os melhores mentores em ciência de dados e inteligência artificial: domínio avançado em SQL, Pandas e fluxos de trabalho de aprendizado de máquina
Descubra os melhores mentores em ciência de dados com IA para 2026, que o ajudarão a dominar SQL, Pandas e fluxos de trabalho de aprendizado de máquina. Conheça nossa seleção cuidadosamente elaborada e altamente avaliada no XIX.AI para obter orientações poderosas e revolucionárias. Compare opções gratuitas e pagas com informações valiosas da prática real. Domine a ciência de dados hoje mesmo.
10 ferramentas
xix.ai

 Comentários (0)
Comentários (0)
A LimX demonstra navegação segura com câmeras RealSense e o NVIDIA CuVSLAM. Fonte: RealSense
À medida que os robôs humanóides passam de protótipos para aplicações práticas, a percepção confiável torna-se fundamental para a segurança, e não apenas para o desempenho. A RealSense enfatizou esse ponto na NVIDIA GTC nesta semana, apresentando recursos avançados de navegação desenvolvidos com a LimX Dynamics.
“Os humanóides operam em espaços tridimensionais complexos ao lado de pessoas, em ambientes que estão em constante mudança”, disse Nadav Orbach, CEO da RealSense. “Para que os robôs trabalhem com segurança junto a humanos, seus sistemas de percepção devem fazer mais do que apenas processar dados brutos de sensores. Eles precisam funcionar como um córtex visual, permitindo localização precisa, prevenção de obstáculos, compreensão do terreno e movimentos estáveis e previsíveis em ambientes não estruturados.”
Criada a partir da Intel Corp. no ano passado, a RealSense fornece câmeras de profundidade e sistemas de visão para robôs móveis autônomos (AMRs), humanóides e diversas aplicações em automação industrial, saúde e controle de acesso. A empresa sediada em Cupertino, Califórnia, afirmou que sua tecnologia de percepção permite que máquinas e IA física naveguem e interajam com o mundo humano de forma confiável e inteligente.
RealSense oferece “córtex visual” para robôs humanóides
“As câmeras, a percepção avançada e o software de raciocínio que dão visão aos robôs são mais do que apenas ferramentas de navegação ou execução de tarefas”, explicou a RealSense. “Eles funcionam como o córtex visual para humanóides, permitindo que se movam, trabalhem e operem de forma eficaz em ambientes humanos.”
A empresa afirma que sua demonstração de navegação autônoma de humanóides na GTC em San Jose, Califórnia, é uma novidade no setor. A LimX Dynamics planeja mostrar como a percepção de profundidade 3D densa permite que robôs com pernas localizem, mapeiem e naveguem de forma autônoma com segurança e previsibilidade.
Seu sistema utiliza câmeras de profundidade RealSense com vSLAM (localização e mapeamento visuais simultâneos), integradas à odometria do NVIDIA CuVSLAM. O NVIDIA Isaac Lab acelerou o desenvolvimento dessa pilha de tecnologia, fornecendo um ambiente digital de alta fidelidade para aprendizado por reforço e treinamento de políticas.
A LimX Dynamics, com sede em Shenzhen, na China, afirmou que essa abordagem centrada na simulação ajudou a preencher a lacuna entre “simulação e realidade”, permitindo que seu humanóide dominasse manobras 3D complexas com segurança comprovada antes de sua estreia física na NVIDIA GTC.
Os humanóides precisam de navegação em espaços 3D
Robôs com rodas normalmente se movem em um plano previsível e plano, priorizando velocidade e eficiência — aspiradores robóticos são um excelente exemplo, de acordo com a RealSense.
No entanto, os humanóides e os quadrúpedes representam um desafio muito maior, observou a empresa. Eles navegam em espaços 3D completos, o que envolve pontos de contato variáveis e movimentos não lineares. Isso exige um posicionamento estável dos pés e uma percepção ambiental constante.
“A odometria baseada apenas em encoders e o lidar 2D, comumente usados em robôs com rodas, carecem da percepção 3D abrangente necessária para um movimento estável e seguro”, afirmou a RealSense. “Até agora, essa limitação restringiu a implantação, forçando muitos robôs com pernas a depender de teleoperação, supervisão rigorosa ou ambientes estritamente controlados.”
Nota do editor: Mike Nielsen, diretor de marketing da RealSense, participará de um painel principal sobre “O estado dos humanóides” na Robotics Summit & Expo 2026.
LimX Dynamics demonstrará um caminho mais seguro para a robótica
Os parceiros afirmaram que demonstrarão como a percepção de profundidade densa da RealSense, combinada com a odometria visual da NVIDIA e o cuVSLAM, proporciona compreensão da cena, localização, mapeamento e navegação. Isso permite que o humanóide da LimX opere com segurança no espaço 3D.
Em termos práticos, eles destacaram que uma robótica mais segura envolve:
Localização e mapeamento precisos, garantindo que o robô sempre saiba sua posição e o ambiente ao redor.Prevenção de colisões com pessoas e objetos em movimento.Prevenção de quedas e locomoção estável por meio da percepção 3D do terreno, bordas e mudanças de altura.Movimentos previsíveis e compreensíveis para humanos, minimizando paradas bruscas ou correções erráticas.“A percepção 3D densa também possibilita novos comportamentos que historicamente têm sido difíceis de executar com segurança”, explicou a RealSense. “Isso inclui navegação em escadas, detecção de meio-fio e elevação, travessia de terrenos irregulares e prevenção dinâmica de obstáculos em espaços compartilhados. O planejamento avançado de trajetória permite que os robôs se adaptem a condições variáveis, como carrinhos em movimento, paletes em deslocamento ou pessoas entrando em seu caminho.”
A RealSense afirmou que a demonstração da LimX Dynamics destaca seu papel cada vez mais importante no ecossistema mais amplo da robótica. A empresa destacou uma década de inovação em sensoriamento de profundidade, incluindo tecnologia estéreo ativa otimizada para sensoriamento de curto e médio alcance, e um ecossistema maduro de kits de desenvolvimento de software (SDK).
Além disso, a RealSense afirmou que tem auxiliado equipes de robótica na prototipagem e na escalabilidade de forma mais eficiente e está acelerando o desenvolvimento de autonomia segura para sistemas humanóides.










 A variante OpenClaw da Nvidia pode resolver seu maior desafio: a segurança
O CEO da Nvidia, Jensen Huang, acredita que toda empresa precisa de uma estratégia OpenClaw — e a Nvidia está pronta para fornecê-la.Durante sua palestra na GTC na segunda-feira, Huang anunciou que a
A variante OpenClaw da Nvidia pode resolver seu maior desafio: a segurança
O CEO da Nvidia, Jensen Huang, acredita que toda empresa precisa de uma estratégia OpenClaw — e a Nvidia está pronta para fornecê-la.Durante sua palestra na GTC na segunda-feira, Huang anunciou que a
 O Pentágono assinou acordos com a Nvidia, a Microsoft e a AWS para implementar inteligência artificial em redes confidenciais.
Após alcançar acordos anteriores com a Google, a SpaceX e a OpenAI, o Departamento de Defesa dos EUA anunciou na sexta-feira que assinou contratos com a Nvidia, a Microsoft, a Amazon Web Services e a Reflection AI para utilizar suas tecnologias e mod
O Pentágono assinou acordos com a Nvidia, a Microsoft e a AWS para implementar inteligência artificial em redes confidenciais.
Após alcançar acordos anteriores com a Google, a SpaceX e a OpenAI, o Departamento de Defesa dos EUA anunciou na sexta-feira que assinou contratos com a Nvidia, a Microsoft, a Amazon Web Services e a Reflection AI para utilizar suas tecnologias e mod
 A Nvidia GTC apresenta o NemoClaw, o robô Olaf e uma aposta de US$ 1 trilhão
Carregando o player…O CEO Jensen Huang subiu ao palco na conferência GTC da Nvidia nesta semana, vestindo sua jaqueta de couro característica, para proferir uma palestra de duas horas e meia, projetan
A Nvidia GTC apresenta o NemoClaw, o robô Olaf e uma aposta de US$ 1 trilhão
Carregando o player…O CEO Jensen Huang subiu ao palco na conferência GTC da Nvidia nesta semana, vestindo sua jaqueta de couro característica, para proferir uma palestra de duas horas e meia, projetan
Descubra os melhores geradores de IA para mangás shonen de 2026 no XIX.AI. Nossa lista selecionada e com as melhores avaliações apresenta ferramentas poderosas para criar sequências de ação cheias de adrenalina e efeitos dinâmicos de energia. Compare opções gratuitas e pagas com testes práticos. Liberte seu potencial criativo e comece a criar mangás épicos hoje mesmo!
15 ferramentas
xix.ai

Os melhores gerenciadores de despesas com IA de 2026: as ferramentas mais bem avaliadas para digitalizar recibos e categorizar despesas corporativas automaticamente. Descubra soluções poderosas e revolucionárias para uma gestão de despesas sem esforço, um acompanhamento financeiro preciso e uma conformidade simplificada. Nossa comparação, cuidadosamente selecionada e atualizada semanalmente, entre opções gratuitas e pagas ajuda você a encontrar a solução ideal. Aproveite ao máximo as vantagens da IA com as recomendações dos especialistas da XIX.AI.
10 ferramentas
xix.ai

Descubra as melhores ferramentas de recrutamento com IA de 2026 no XIX.AI. Nossa lista selecionada apresenta soluções poderosas e revolucionárias para a triagem de currículos e a automação do agendamento de entrevistas com candidatos. Compare opções gratuitas e pagas com testes práticos e rankings atualizados semanalmente. Encontre o seu assistente de contratação ideal e otimize seu processo de recrutamento hoje mesmo!
10 ferramentas
xix.ai

Descubra os melhores coaches de bem-estar pessoal e concentração com IA de 2026 no XIX.AI. Nossos rankings selecionados apresentam ferramentas de ponta e revolucionárias para lidar com o esgotamento e aumentar a energia mental. Compare opções gratuitas e pagas com informações reais. Descubra hoje mesmo o caminho para atingir o máximo de produtividade e bem-estar.
10 ferramentas
xix.ai

Descubra os melhores chatbots românticos com IA de 2026 para construir relacionamentos genuínos e duradouros. Nossa lista selecionada apresenta personalidades marcantes e consistentes, comparações entre versões gratuitas e pagas, além de testes práticos. Encontre seu companheiro ideal e comece a construir seu relacionamento hoje mesmo no XIX.AI.
10 ferramentas
xix.ai

Descubra os melhores mentores em ciência de dados com IA para 2026, que o ajudarão a dominar SQL, Pandas e fluxos de trabalho de aprendizado de máquina. Conheça nossa seleção cuidadosamente elaborada e altamente avaliada no XIX.AI para obter orientações poderosas e revolucionárias. Compare opções gratuitas e pagas com informações valiosas da prática real. Domine a ciência de dados hoje mesmo.
10 ferramentas
xix.ai













