
















 首页
首页英特尔RealSense在GTC大会上首次展示自主导航类人机器人
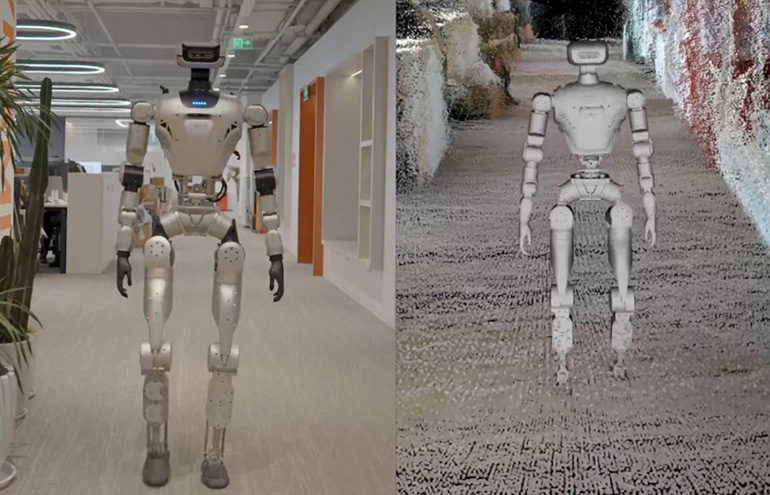
LimX 展示了利用 RealSense 相机和 NVIDIA CuVSLAM 实现的安全导航。来源:RealSense
随着类人机器人从原型机向实际应用转型,可靠的感知能力不仅关乎性能,更对安全性至关重要。RealSense在本周的NVIDIA GTC大会上强调了这一点,并展示了与LimX Dynamics合作开发的先进导航能力。
“人形机器人在复杂的三维空间中与人类协同工作,所处的环境时刻都在变化,”RealSense首席执行官纳达夫·奥尔巴赫(Nadav Orbach)表示。“为了让机器人能与人类安全共处,其感知系统必须超越单纯处理原始传感器数据的范畴。它们需要像视觉皮层一样运作,从而实现精准定位、避障、地形理解,并在非结构化环境中保持稳定且可预测的运动。”
RealSense 于去年从英特尔公司分拆出来,为自主移动机器人(AMR)、类人机器人以及工业自动化、医疗保健和门禁控制等领域的各种应用提供深度摄像头和视觉系统。这家总部位于加利福尼亚州库比蒂诺的公司表示,其感知技术使机器和物理人工智能能够可靠且智能地在人类世界中导航并与之互动。
RealSense为类人机器人提供“视觉皮层”
“赋予机器人视觉能力的摄像头、先进感知及推理软件,绝不仅仅是导航或任务执行工具,”RealSense解释道,“它们相当于类人机器人的视觉皮层,使其能够在人类环境中有效移动、工作和运作。”
该公司声称,其在加利福尼亚州圣何塞举行的GTC大会上展示的类人机器人自主导航技术是业界首创。LimX Dynamics计划展示高密度3D深度感知技术如何使腿式机器人能够安全且可预测地进行定位、建图和自主导航。
该系统采用搭载vSLAM(视觉同步定位与建图)技术的RealSense深度摄像头,并整合了NVIDIA CuVSLAM的里程计功能。NVIDIA Isaac Lab加速了该技术栈的开发,为强化学习和策略训练提供了高保真数字环境。
总部位于中国深圳的 LimX Dynamics 表示,这种“模拟优先”的方法有助于弥合“模拟到现实”的鸿沟,使其类人机器人能在 NVIDIA GTC 大会上进行实体首秀之前,在经过安全验证的前提下掌握复杂的 3D 操作。
类人机器人需要三维空间导航
RealSense指出,轮式机器人通常在可预测的平面上移动,优先考虑速度和效率——扫地机器人便是典型代表。
然而,该公司指出,类人机器人和四足机器人面临的挑战要大得多。它们在完整的3D空间中导航,这涉及接触点的变化和非线性运动。这要求脚部放置稳定并持续感知环境。
“仅依赖编码器的里程计和2D激光雷达——这些通常用于轮式机器人的技术——缺乏实现稳定安全运动所需的全面3D感知能力,”RealSense强调。“迄今为止,这一局限性一直制约着机器人的部署,迫使许多多足机器人不得不依赖遥控操作、近距离监督或严格受控的环境。”
编者按:RealSense首席营销官Mike Nielsen将参加2026年机器人峰会暨博览会上关于“类人机器人现状”的主题论坛。
LimX Dynamics将展示更安全的机器人发展路径
双方合作伙伴表示,将演示 RealSense 的高密度深度感知技术如何与 NVIDIA 的视觉里程计及 cuVSLAM 技术相结合,实现场景理解、定位、建图和导航。这使得 LimX 的人形机器人能够在三维空间中安全运行。
具体而言,他们指出更安全的机器人技术包括:
精准的定位与建图,确保机器人始终掌握自身位置及周边环境。与人员及移动物体的碰撞规避。通过三维感知地形、边缘及高度变化,实现防跌倒与稳定行走。可预测且符合人类直觉的运动模式,最大限度减少突然停止或异常修正。“高密度3D感知技术还解锁了历史上难以安全执行的新行为,”RealSense解释道。“这些包括楼梯导航、路缘和高度检测、不平坦地形的穿越,以及在共享空间中的动态障碍物避让。先进的路径规划使机器人能够适应不断变化的条件,例如移动的推车、位移的托盘,或进入其路径的人员。”
RealSense表示,LimX Dynamics的演示凸显了其在更广泛的机器人生态系统中日益扩大的作用。该公司强调了其在深度感知领域十年的创新成果,包括针对近距离和中距离感知优化的主动立体视觉技术,以及成熟的软件开发工具包(SDK)生态系统。
此外,RealSense 表示,其已协助机器人团队更高效地进行原型设计和规模化生产,并正在加速类人机器人系统安全自主能力的开发。
相关文章
 英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
相关专题推荐
文字转语音
英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
相关专题推荐
文字转语音
 专为阅读障碍设计的顶级AI语音合成应用:助力学生提升学习与阅读效率
专为阅读障碍设计的顶级AI语音合成应用:助力学生提升学习与阅读效率
探索2026年最新精选的高评分AI语音合成(TTS)应用,专为阅读障碍者提供支持。我们的专家评级对比了免费与付费工具,重点介绍了能够提升阅读效率和学习效果的强大功能。探索这些必试的、具有革命性意义的解决方案,释放学生的潜能。立即访问XIX.AI,开启您的探索之旅。
 10 个工具
10 个工具
 xix.ai
漫画创作
少年漫画顶级AI生成器:打造高能动作场面与特效
xix.ai
漫画创作
少年漫画顶级AI生成器:打造高能动作场面与特效
在 XIX.AI 探索 2026 年最优秀的少年漫画 AI 生成工具。我们精心筛选的这份高评分清单汇集了强大的工具,助您创作充满张力的动作场面和动态能量特效。通过实际测试对比免费与付费选项。释放您的创作潜能,立即开始创作史诗级漫画吧!
15 个工具
xix.ai
商业
最佳 AI 费用追踪工具:扫描收据并自动分类企业开支
2026年最新最佳AI报销管理工具:广受好评的解决方案,可自动扫描收据并分类企业支出。探索这些功能强大、颠覆传统的解决方案,助您轻松管理报销、精准追踪财务并简化合规流程。我们精心整理并每周更新的免费与付费选项对比指南,助您找到最适合的工具。通过XIX.AI的专家精选,释放您的AI优势。
10 个工具
xix.ai
商业
最佳人工智能招聘工具:筛选简历并自动安排候选人面试
在 XIX.AI 上探索 2026 年最新、评价最高的人工智能招聘工具。我们精心筛选的清单汇集了功能强大、颠覆传统的解决方案,可帮助您筛选简历并自动安排候选人面试。通过实际测试和每周更新的排名,对比免费与付费选项。立即找到最适合您的招聘助手,优化您的招聘流程!
10 个工具
xix.ai
生产率
AI个人健康与专注力教练:缓解倦怠,提升精神能量
立即访问 XIX.AI,探索 2026 年最优秀的 AI 个人健康与专注力教练。我们的精选排行榜汇集了广受好评、具有颠覆性意义的工具,助您缓解倦怠、提升精神能量。通过真实案例分析,对比免费与付费选项。立即开启通往巅峰生产力和身心健康的道路。
10 个工具
xix.ai
聊天机器人
备受好评的AI浪漫聊天机器人:凭借稳定的个性建立长期关系
探索2026年最新、评价最高的人工智能浪漫聊天机器人,助您建立真实而长久的联系。我们的精选清单涵盖了功能强大且性格鲜明的聊天机器人,并提供了免费与付费版本的对比分析以及实际测试结果。在XIX.AI上找到您的完美伴侣,立即开始建立联系吧。
10 个工具
xix.ai

 评论 (0)
0/500
评论 (0)
0/500
LimX 展示了利用 RealSense 相机和 NVIDIA CuVSLAM 实现的安全导航。来源:RealSense
随着类人机器人从原型机向实际应用转型,可靠的感知能力不仅关乎性能,更对安全性至关重要。RealSense在本周的NVIDIA GTC大会上强调了这一点,并展示了与LimX Dynamics合作开发的先进导航能力。
“人形机器人在复杂的三维空间中与人类协同工作,所处的环境时刻都在变化,”RealSense首席执行官纳达夫·奥尔巴赫(Nadav Orbach)表示。“为了让机器人能与人类安全共处,其感知系统必须超越单纯处理原始传感器数据的范畴。它们需要像视觉皮层一样运作,从而实现精准定位、避障、地形理解,并在非结构化环境中保持稳定且可预测的运动。”
RealSense 于去年从英特尔公司分拆出来,为自主移动机器人(AMR)、类人机器人以及工业自动化、医疗保健和门禁控制等领域的各种应用提供深度摄像头和视觉系统。这家总部位于加利福尼亚州库比蒂诺的公司表示,其感知技术使机器和物理人工智能能够可靠且智能地在人类世界中导航并与之互动。
RealSense为类人机器人提供“视觉皮层”
“赋予机器人视觉能力的摄像头、先进感知及推理软件,绝不仅仅是导航或任务执行工具,”RealSense解释道,“它们相当于类人机器人的视觉皮层,使其能够在人类环境中有效移动、工作和运作。”
该公司声称,其在加利福尼亚州圣何塞举行的GTC大会上展示的类人机器人自主导航技术是业界首创。LimX Dynamics计划展示高密度3D深度感知技术如何使腿式机器人能够安全且可预测地进行定位、建图和自主导航。
该系统采用搭载vSLAM(视觉同步定位与建图)技术的RealSense深度摄像头,并整合了NVIDIA CuVSLAM的里程计功能。NVIDIA Isaac Lab加速了该技术栈的开发,为强化学习和策略训练提供了高保真数字环境。
总部位于中国深圳的 LimX Dynamics 表示,这种“模拟优先”的方法有助于弥合“模拟到现实”的鸿沟,使其类人机器人能在 NVIDIA GTC 大会上进行实体首秀之前,在经过安全验证的前提下掌握复杂的 3D 操作。
类人机器人需要三维空间导航
RealSense指出,轮式机器人通常在可预测的平面上移动,优先考虑速度和效率——扫地机器人便是典型代表。
然而,该公司指出,类人机器人和四足机器人面临的挑战要大得多。它们在完整的3D空间中导航,这涉及接触点的变化和非线性运动。这要求脚部放置稳定并持续感知环境。
“仅依赖编码器的里程计和2D激光雷达——这些通常用于轮式机器人的技术——缺乏实现稳定安全运动所需的全面3D感知能力,”RealSense强调。“迄今为止,这一局限性一直制约着机器人的部署,迫使许多多足机器人不得不依赖遥控操作、近距离监督或严格受控的环境。”
编者按:RealSense首席营销官Mike Nielsen将参加2026年机器人峰会暨博览会上关于“类人机器人现状”的主题论坛。
LimX Dynamics将展示更安全的机器人发展路径
双方合作伙伴表示,将演示 RealSense 的高密度深度感知技术如何与 NVIDIA 的视觉里程计及 cuVSLAM 技术相结合,实现场景理解、定位、建图和导航。这使得 LimX 的人形机器人能够在三维空间中安全运行。
具体而言,他们指出更安全的机器人技术包括:
精准的定位与建图,确保机器人始终掌握自身位置及周边环境。与人员及移动物体的碰撞规避。通过三维感知地形、边缘及高度变化,实现防跌倒与稳定行走。可预测且符合人类直觉的运动模式,最大限度减少突然停止或异常修正。“高密度3D感知技术还解锁了历史上难以安全执行的新行为,”RealSense解释道。“这些包括楼梯导航、路缘和高度检测、不平坦地形的穿越,以及在共享空间中的动态障碍物避让。先进的路径规划使机器人能够适应不断变化的条件,例如移动的推车、位移的托盘,或进入其路径的人员。”
RealSense表示,LimX Dynamics的演示凸显了其在更广泛的机器人生态系统中日益扩大的作用。该公司强调了其在深度感知领域十年的创新成果,包括针对近距离和中距离感知优化的主动立体视觉技术,以及成熟的软件开发工具包(SDK)生态系统。
此外,RealSense 表示,其已协助机器人团队更高效地进行原型设计和规模化生产,并正在加速类人机器人系统安全自主能力的开发。










 英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
 五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
 英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
探索2026年最新精选的高评分AI语音合成(TTS)应用,专为阅读障碍者提供支持。我们的专家评级对比了免费与付费工具,重点介绍了能够提升阅读效率和学习效果的强大功能。探索这些必试的、具有革命性意义的解决方案,释放学生的潜能。立即访问XIX.AI,开启您的探索之旅。
10 个工具
xix.ai
在 XIX.AI 探索 2026 年最优秀的少年漫画 AI 生成工具。我们精心筛选的这份高评分清单汇集了强大的工具,助您创作充满张力的动作场面和动态能量特效。通过实际测试对比免费与付费选项。释放您的创作潜能,立即开始创作史诗级漫画吧!
15 个工具
xix.ai

2026年最新最佳AI报销管理工具:广受好评的解决方案,可自动扫描收据并分类企业支出。探索这些功能强大、颠覆传统的解决方案,助您轻松管理报销、精准追踪财务并简化合规流程。我们精心整理并每周更新的免费与付费选项对比指南,助您找到最适合的工具。通过XIX.AI的专家精选,释放您的AI优势。
10 个工具
xix.ai
在 XIX.AI 上探索 2026 年最新、评价最高的人工智能招聘工具。我们精心筛选的清单汇集了功能强大、颠覆传统的解决方案,可帮助您筛选简历并自动安排候选人面试。通过实际测试和每周更新的排名,对比免费与付费选项。立即找到最适合您的招聘助手,优化您的招聘流程!
10 个工具
xix.ai
立即访问 XIX.AI,探索 2026 年最优秀的 AI 个人健康与专注力教练。我们的精选排行榜汇集了广受好评、具有颠覆性意义的工具,助您缓解倦怠、提升精神能量。通过真实案例分析,对比免费与付费选项。立即开启通往巅峰生产力和身心健康的道路。
10 个工具
xix.ai
探索2026年最新、评价最高的人工智能浪漫聊天机器人,助您建立真实而长久的联系。我们的精选清单涵盖了功能强大且性格鲜明的聊天机器人,并提供了免费与付费版本的对比分析以及实际测试结果。在XIX.AI上找到您的完美伴侣,立即开始建立联系吧。
10 个工具
xix.ai













