
















 Heim
Heim
Intel RealSense präsentiert auf der GTC die selbststeuernde Navigation für humanoide Roboter
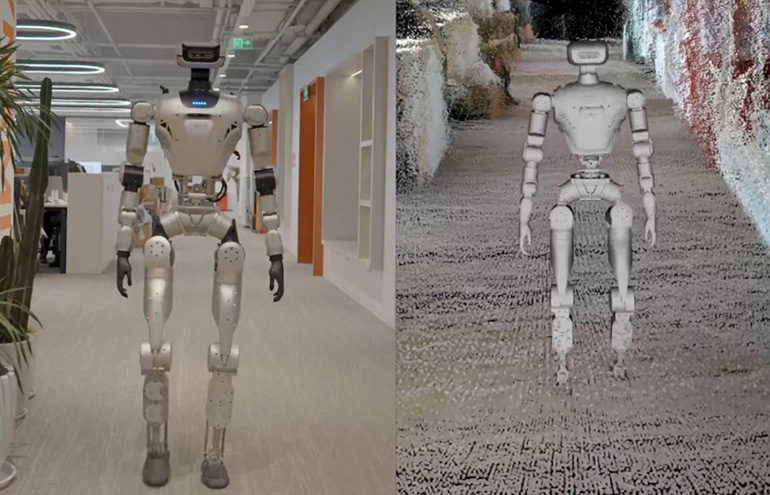
LimX demonstriert sichere Navigation mit RealSense-Kameras und NVIDIA CuVSLAM. Quelle: RealSense
Da humanoide Roboter den Übergang von Prototypen zu praktischen Anwendungen vollziehen, wird eine zuverlässige Wahrnehmung nicht nur für die Leistung, sondern auch für die Sicherheit entscheidend. RealSense betonte diesen Punkt diese Woche auf der NVIDIA GTC und präsentierte fortschrittliche Navigationsfähigkeiten, die gemeinsam mit LimX Dynamics entwickelt wurden.
„Humanoide agieren in komplexen, dreidimensionalen Räumen neben Menschen, in Umgebungen, die sich ständig verändern“, sagte Nadav Orbach, CEO von RealSense. „Damit Roboter sicher mit Menschen zusammenarbeiten können, müssen ihre Wahrnehmungssysteme mehr leisten als nur die Verarbeitung von Rohdaten der Sensoren. Sie müssen wie ein visueller Kortex funktionieren und präzise Lokalisierung, Hindernisvermeidung, Geländeverständnis sowie stabile, vorhersehbare Bewegungen in unstrukturierten Umgebungen ermöglichen.“
RealSense, das im vergangenen Jahr aus Intel Corp. ausgegliedert wurde, bietet Tiefenkameras und Bildverarbeitungssysteme für autonome mobile Roboter (AMRs), humanoide Roboter sowie verschiedene Anwendungen in den Bereichen Industrieautomation, Gesundheitswesen und Zugangskontrolle an. Das in Cupertino, Kalifornien, ansässige Unternehmen erklärte, dass seine Wahrnehmungstechnologie es Maschinen und physischer KI ermöglicht, sich zuverlässig und intelligent in der menschlichen Welt zu bewegen und mit ihr zu interagieren.
RealSense bietet „visuellen Kortex“ für humanoide Roboter
„Die Kameras, die fortschrittliche Wahrnehmungs- und Schlussfolgerungssoftware, die Robotern das Sehen ermöglichen, sind mehr als nur Werkzeuge zur Navigation oder zur Ausführung von Aufgaben“, erklärte RealSense. „Sie dienen als visueller Kortex für Humanoide und ermöglichen es ihnen, sich in menschlichen Umgebungen effektiv zu bewegen, zu arbeiten und zu agieren.“
Das Unternehmen behauptet, dass seine Demonstration der autonomen humanoiden Navigation auf der GTC in San Jose, Kalifornien, eine Branchenneuheit ist. LimX Dynamics plant zu zeigen, wie eine dichte 3D-Tiefenwahrnehmung es Laufrobotern ermöglicht, sich sicher und vorhersehbar zu lokalisieren, zu kartieren und autonom zu navigieren.
Ihr System nutzt RealSense-Tiefenkameras mit vSLAM (Visual Simultaneous Localization and Mapping), integriert mit der Odometrie von NVIDIA CuVSLAM. Das NVIDIA Isaac Lab beschleunigte die Entwicklung dieses Technologie-Stacks und stellte eine hochauflösende digitale Umgebung für verstärktes Lernen und Policy-Training bereit.
Das in Shenzhen, China, ansässige Unternehmen LimX Dynamics erklärte, dass dieser „Simulation-first“-Ansatz dazu beigetragen habe, die Lücke zwischen „Simulation und Realität“ zu schließen, sodass sein Humanoid komplexe 3D-Manöver mit nachgewiesener Sicherheit meistern konnte, bevor er auf der NVIDIA GTC erstmals physisch vorgestellt wurde.
Humanoide benötigen Navigation für 3D-Räume
Roboter auf Rädern bewegen sich in der Regel auf einer vorhersehbaren, ebenen Fläche und legen dabei Wert auf Geschwindigkeit und Effizienz – Roboterstaubsauger sind laut RealSense ein Paradebeispiel dafür.
Humanoide und Vierbeiner stellen jedoch eine weitaus größere Herausforderung dar, so das Unternehmen. Sie navigieren in vollständigen 3D-Räumen, was wechselnde Kontaktpunkte und nichtlineare Bewegungen mit sich bringt. Dies erfordert eine stabile Fußstellung und ständige Umgebungswahrnehmung.
„Odometrie nur mit Encodern und 2D-Lidar, die üblicherweise bei Radrobotern zum Einsatz kommen, verfügen nicht über die umfassende 3D-Wahrnehmung, die für stabile und sichere Bewegungen erforderlich ist“, erklärte RealSense. „Bislang hat diese Einschränkung den Einsatz eingeschränkt und viele Laufroboter dazu gezwungen, auf Fernsteuerung, enge Überwachung oder streng kontrollierte Umgebungen angewiesen zu sein.“
Anmerkung der Redaktion: Mike Nielsen, CMO bei RealSense, wird an einer Keynote-Podiumsdiskussion zum Thema „The State of Humanoids“ auf dem Robotics Summit & Expo 2026 teilnehmen.
LimX Dynamics demonstriert einen sichereren Weg für die Robotik
Die Partner gaben bekannt, dass sie demonstrieren werden, wie die dichte Tiefenwahrnehmung von RealSense in Kombination mit der visuellen Odometrie von NVIDIA und cuVSLAM Szenenverständnis, Lokalisierung, Kartierung und Navigation ermöglicht. Dies ermöglicht es dem Humanoiden von LimX, sicher im 3D-Raum zu agieren.
In der Praxis umfasst sicherere Robotik laut ihrer Darstellung:
Genaue Lokalisierung und Kartierung, damit der Roboter stets seine Position und Umgebung kennt. Kollisionsvermeidung mit Menschen und sich bewegenden Objekten. Sturzprävention und stabile Fortbewegung durch 3D-Wahrnehmung von Gelände, Kanten und Höhenunterschieden. Vorhersehbare, für Menschen nachvollziehbare Bewegungen, die plötzliche Stopps oder unvorhersehbare Korrekturen minimieren.„Dichte 3D-Wahrnehmung eröffnet zudem neue Verhaltensweisen, deren sichere Ausführung bisher schwierig war“, erklärte RealSense. „Dazu gehören Treppennavigation, die Erkennung von Bordsteinen und Höhenunterschieden, das Bewegen auf unebenem Gelände sowie die dynamische Hindernisvermeidung in gemeinsam genutzten Räumen. Dank fortschrittlicher Wegplanung können sich Roboter an wechselnde Bedingungen anpassen, wie beispielsweise fahrende Wagen, sich verschiebende Paletten oder Personen, die ihren Weg kreuzen.“
RealSense erklärte, die LimX Dynamics-Demonstration unterstreiche die wachsende Rolle des Unternehmens im breiteren Robotik-Ökosystem. Das Unternehmen verwies auf ein Jahrzehnt der Innovation im Bereich der Tiefenerfassung, einschließlich aktiver Stereotechnologie, die für die Nah- und Mittelbereichserfassung optimiert ist, sowie eines ausgereiften Software Development Kit (SDK)-Ökosystems.
Darüber hinaus erklärte RealSense, dass es Robotik-Teams bei der effizienteren Prototypenentwicklung und Skalierung unterstützt und die Entwicklung sicherer Autonomie für humanoide Systeme beschleunigt.
Verwandter Artikel
 Nvidias OpenClaw-Variante könnte die größte Herausforderung lösen: die Sicherheit
Jensen Huang, CEO von Nvidia, ist der Ansicht, dass jedes Unternehmen eine OpenClaw-Strategie benötigt – und Nvidia ist bereit, diese bereitzustellen.Während seiner GTC-Keynote am Montag kündigte Huan
Das Pentagon schließt Vereinbarungen mit Nvidia, Microsoft und AWS ab, um KI in gesicherten Netzwerken einzusetzen.
Nachdem zuvor Einigungen mit Google, SpaceX und OpenAI erreicht worden waren, gab das US-Verteidigungsministerium am Freitag bekannt, dass es nun auch Vereinbarungen mit Nvidia, Microsoft, Amazon Web Services und Reflection AI unterzeichnet hat, um d
Nvidia stellt auf der GTC NemoClaw, den Roboter Olaf und eine 1-Billionen-Dollar-Wette vor
Der Player wird geladen…CEO Jensen Huang betrat diese Woche in seiner charakteristischen Lederjacke die Bühne der GTC-Konferenz von Nvidia, um eine zweieinhalbstündige Keynote zu halten, in der er bis
Empfehlungen zu verwandten Spezialthemen
Geschäft
Nvidias OpenClaw-Variante könnte die größte Herausforderung lösen: die Sicherheit
Jensen Huang, CEO von Nvidia, ist der Ansicht, dass jedes Unternehmen eine OpenClaw-Strategie benötigt – und Nvidia ist bereit, diese bereitzustellen.Während seiner GTC-Keynote am Montag kündigte Huan
Das Pentagon schließt Vereinbarungen mit Nvidia, Microsoft und AWS ab, um KI in gesicherten Netzwerken einzusetzen.
Nachdem zuvor Einigungen mit Google, SpaceX und OpenAI erreicht worden waren, gab das US-Verteidigungsministerium am Freitag bekannt, dass es nun auch Vereinbarungen mit Nvidia, Microsoft, Amazon Web Services und Reflection AI unterzeichnet hat, um d
Nvidia stellt auf der GTC NemoClaw, den Roboter Olaf und eine 1-Billionen-Dollar-Wette vor
Der Player wird geladen…CEO Jensen Huang betrat diese Woche in seiner charakteristischen Lederjacke die Bühne der GTC-Konferenz von Nvidia, um eine zweieinhalbstündige Keynote zu halten, in der er bis
Empfehlungen zu verwandten Spezialthemen
Geschäft
 Die besten KI-basierten Spesenabrechnungsprogramme: Quittungen scannen und Geschäftsausgaben automatisch kategorisieren
Die besten KI-basierten Spesenabrechnungsprogramme: Quittungen scannen und Geschäftsausgaben automatisch kategorisieren
Die besten KI-basierten Spesenmanager 2026: Erstklassige Tools zum Scannen von Belegen und zur automatischen Kategorisierung von Unternehmensausgaben. Entdecken Sie leistungsstarke, bahnbrechende Lösungen für müheloses Spesenmanagement, präzise Finanzüberwachung und optimierte Compliance. Unser sorgfältig zusammengestellter, wöchentlich aktualisierter Vergleich zwischen kostenlosen und kostenpflichtigen Optionen hilft Ihnen dabei, die perfekte Lösung zu finden. Nutzen Sie Ihren KI-Vorteil mit den Expertenempfehlungen von XIX.AI.
 10 Tools
10 Tools
 xix.ai
Geschäft
Die besten KI-Tools für die Personalbeschaffung: Lebensläufe prüfen und die Terminplanung für Vorstellungsgespräche automatisieren
xix.ai
Geschäft
Die besten KI-Tools für die Personalbeschaffung: Lebensläufe prüfen und die Terminplanung für Vorstellungsgespräche automatisieren
Entdecken Sie auf XIX.AI die besten KI-Tools für die Personalbeschaffung des Jahres 2026. Unsere sorgfältig zusammengestellte Liste umfasst leistungsstarke, bahnbrechende Lösungen für die Sichtung von Lebensläufen und die automatisierte Terminplanung für Vorstellungsgespräche. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von Praxistests und wöchentlich aktualisierten Rankings. Finden Sie Ihren perfekten Assistenten für die Personalbeschaffung und optimieren Sie noch heute Ihren Rekrutierungsprozess!
10 Tools
xix.ai
Produktivität
KI-Coaches für persönliches Wohlbefinden und Konzentration: Burnout bewältigen und die geistige Energie steigern
Entdecken Sie auf XIX.AI die besten KI-basierten Coaches für persönliches Wohlbefinden und Konzentration des Jahres 2026. Unsere sorgfältig zusammengestellte Rangliste umfasst erstklassige, bahnbrechende Tools zur Bewältigung von Burnout und zur Steigerung der mentalen Energie. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von Erfahrungsberichten aus der Praxis. Schlagen Sie noch heute den Weg zu höchster Produktivität und Wohlbefinden ein.
10 Tools
xix.ai
Chatbot
Die besten KI-basierten Romantik-Chatbots: Bauen Sie langfristige Beziehungen mit beständiger Persönlichkeit auf
Entdecken Sie die besten KI-Romantik-Chatbots des Jahres 2026, mit denen Sie echte, langfristige Beziehungen aufbauen können. Unsere sorgfältig zusammengestellte Liste bietet Ihnen überzeugende, konsistente Persönlichkeiten, Vergleiche zwischen kostenlosen und kostenpflichtigen Angeboten sowie Tests aus der Praxis. Finden Sie Ihren perfekten Begleiter und legen Sie noch heute bei XIX.AI los.
10 Tools
xix.ai
Bildung und Lernen
Die besten AI-Datenwissenschafts-Mentoren: Beherrschen Sie SQL, Pandas und Arbeitsabläufe für maschinelles Lernen.
Entdecken Sie die besten AI-Data-Science-Mentoren von 2026, um SQL, Pandas und ML-Arbeitsabläufe zu meistern. Erfahren Sie mehr über unsere hochbewerteten, sorgfältig ausgewählten Angebote bei XIX.AI – für effektive und bahnbrechende Anleitung. Vergleichen Sie kostenlose und bezahlte Optionen mit praktischen Einblicken aus der Praxis. Entfalten Sie Ihr Potenzial in der Data Science noch heute.
10 Tools
xix.ai
Chatbot
Die besten KI-Flirt- und Konversationstrainer: Steigere dein soziales Charisma und dein Selbstvertrauen in Echtzeit
Entdecken Sie auf XIX.AI die besten KI-Flirt- und Konversationstrainer des Jahres 2026. Unsere sorgfältig zusammengestellte, erstklassige Auswahl hilft Ihnen dabei, Ihr soziales Charisma und Ihr Selbstvertrauen in Echtzeit zu stärken. Entdecken Sie unverzichtbare, bahnbrechende Tools mit Vergleichen zwischen kostenlosen und kostenpflichtigen Angeboten sowie wöchentlich aktualisierten Rankings. Schaffen Sie sich noch heute einen sozialen Vorsprung.
10 Tools
xix.ai

 Kommentare (0)
Kommentare (0)
LimX demonstriert sichere Navigation mit RealSense-Kameras und NVIDIA CuVSLAM. Quelle: RealSense
Da humanoide Roboter den Übergang von Prototypen zu praktischen Anwendungen vollziehen, wird eine zuverlässige Wahrnehmung nicht nur für die Leistung, sondern auch für die Sicherheit entscheidend. RealSense betonte diesen Punkt diese Woche auf der NVIDIA GTC und präsentierte fortschrittliche Navigationsfähigkeiten, die gemeinsam mit LimX Dynamics entwickelt wurden.
„Humanoide agieren in komplexen, dreidimensionalen Räumen neben Menschen, in Umgebungen, die sich ständig verändern“, sagte Nadav Orbach, CEO von RealSense. „Damit Roboter sicher mit Menschen zusammenarbeiten können, müssen ihre Wahrnehmungssysteme mehr leisten als nur die Verarbeitung von Rohdaten der Sensoren. Sie müssen wie ein visueller Kortex funktionieren und präzise Lokalisierung, Hindernisvermeidung, Geländeverständnis sowie stabile, vorhersehbare Bewegungen in unstrukturierten Umgebungen ermöglichen.“
RealSense, das im vergangenen Jahr aus Intel Corp. ausgegliedert wurde, bietet Tiefenkameras und Bildverarbeitungssysteme für autonome mobile Roboter (AMRs), humanoide Roboter sowie verschiedene Anwendungen in den Bereichen Industrieautomation, Gesundheitswesen und Zugangskontrolle an. Das in Cupertino, Kalifornien, ansässige Unternehmen erklärte, dass seine Wahrnehmungstechnologie es Maschinen und physischer KI ermöglicht, sich zuverlässig und intelligent in der menschlichen Welt zu bewegen und mit ihr zu interagieren.
RealSense bietet „visuellen Kortex“ für humanoide Roboter
„Die Kameras, die fortschrittliche Wahrnehmungs- und Schlussfolgerungssoftware, die Robotern das Sehen ermöglichen, sind mehr als nur Werkzeuge zur Navigation oder zur Ausführung von Aufgaben“, erklärte RealSense. „Sie dienen als visueller Kortex für Humanoide und ermöglichen es ihnen, sich in menschlichen Umgebungen effektiv zu bewegen, zu arbeiten und zu agieren.“
Das Unternehmen behauptet, dass seine Demonstration der autonomen humanoiden Navigation auf der GTC in San Jose, Kalifornien, eine Branchenneuheit ist. LimX Dynamics plant zu zeigen, wie eine dichte 3D-Tiefenwahrnehmung es Laufrobotern ermöglicht, sich sicher und vorhersehbar zu lokalisieren, zu kartieren und autonom zu navigieren.
Ihr System nutzt RealSense-Tiefenkameras mit vSLAM (Visual Simultaneous Localization and Mapping), integriert mit der Odometrie von NVIDIA CuVSLAM. Das NVIDIA Isaac Lab beschleunigte die Entwicklung dieses Technologie-Stacks und stellte eine hochauflösende digitale Umgebung für verstärktes Lernen und Policy-Training bereit.
Das in Shenzhen, China, ansässige Unternehmen LimX Dynamics erklärte, dass dieser „Simulation-first“-Ansatz dazu beigetragen habe, die Lücke zwischen „Simulation und Realität“ zu schließen, sodass sein Humanoid komplexe 3D-Manöver mit nachgewiesener Sicherheit meistern konnte, bevor er auf der NVIDIA GTC erstmals physisch vorgestellt wurde.
Humanoide benötigen Navigation für 3D-Räume
Roboter auf Rädern bewegen sich in der Regel auf einer vorhersehbaren, ebenen Fläche und legen dabei Wert auf Geschwindigkeit und Effizienz – Roboterstaubsauger sind laut RealSense ein Paradebeispiel dafür.
Humanoide und Vierbeiner stellen jedoch eine weitaus größere Herausforderung dar, so das Unternehmen. Sie navigieren in vollständigen 3D-Räumen, was wechselnde Kontaktpunkte und nichtlineare Bewegungen mit sich bringt. Dies erfordert eine stabile Fußstellung und ständige Umgebungswahrnehmung.
„Odometrie nur mit Encodern und 2D-Lidar, die üblicherweise bei Radrobotern zum Einsatz kommen, verfügen nicht über die umfassende 3D-Wahrnehmung, die für stabile und sichere Bewegungen erforderlich ist“, erklärte RealSense. „Bislang hat diese Einschränkung den Einsatz eingeschränkt und viele Laufroboter dazu gezwungen, auf Fernsteuerung, enge Überwachung oder streng kontrollierte Umgebungen angewiesen zu sein.“
Anmerkung der Redaktion: Mike Nielsen, CMO bei RealSense, wird an einer Keynote-Podiumsdiskussion zum Thema „The State of Humanoids“ auf dem Robotics Summit & Expo 2026 teilnehmen.
LimX Dynamics demonstriert einen sichereren Weg für die Robotik
Die Partner gaben bekannt, dass sie demonstrieren werden, wie die dichte Tiefenwahrnehmung von RealSense in Kombination mit der visuellen Odometrie von NVIDIA und cuVSLAM Szenenverständnis, Lokalisierung, Kartierung und Navigation ermöglicht. Dies ermöglicht es dem Humanoiden von LimX, sicher im 3D-Raum zu agieren.
In der Praxis umfasst sicherere Robotik laut ihrer Darstellung:
Genaue Lokalisierung und Kartierung, damit der Roboter stets seine Position und Umgebung kennt. Kollisionsvermeidung mit Menschen und sich bewegenden Objekten. Sturzprävention und stabile Fortbewegung durch 3D-Wahrnehmung von Gelände, Kanten und Höhenunterschieden. Vorhersehbare, für Menschen nachvollziehbare Bewegungen, die plötzliche Stopps oder unvorhersehbare Korrekturen minimieren.„Dichte 3D-Wahrnehmung eröffnet zudem neue Verhaltensweisen, deren sichere Ausführung bisher schwierig war“, erklärte RealSense. „Dazu gehören Treppennavigation, die Erkennung von Bordsteinen und Höhenunterschieden, das Bewegen auf unebenem Gelände sowie die dynamische Hindernisvermeidung in gemeinsam genutzten Räumen. Dank fortschrittlicher Wegplanung können sich Roboter an wechselnde Bedingungen anpassen, wie beispielsweise fahrende Wagen, sich verschiebende Paletten oder Personen, die ihren Weg kreuzen.“
RealSense erklärte, die LimX Dynamics-Demonstration unterstreiche die wachsende Rolle des Unternehmens im breiteren Robotik-Ökosystem. Das Unternehmen verwies auf ein Jahrzehnt der Innovation im Bereich der Tiefenerfassung, einschließlich aktiver Stereotechnologie, die für die Nah- und Mittelbereichserfassung optimiert ist, sowie eines ausgereiften Software Development Kit (SDK)-Ökosystems.
Darüber hinaus erklärte RealSense, dass es Robotik-Teams bei der effizienteren Prototypenentwicklung und Skalierung unterstützt und die Entwicklung sicherer Autonomie für humanoide Systeme beschleunigt.










 Nvidias OpenClaw-Variante könnte die größte Herausforderung lösen: die Sicherheit
Jensen Huang, CEO von Nvidia, ist der Ansicht, dass jedes Unternehmen eine OpenClaw-Strategie benötigt – und Nvidia ist bereit, diese bereitzustellen.Während seiner GTC-Keynote am Montag kündigte Huan
Nvidias OpenClaw-Variante könnte die größte Herausforderung lösen: die Sicherheit
Jensen Huang, CEO von Nvidia, ist der Ansicht, dass jedes Unternehmen eine OpenClaw-Strategie benötigt – und Nvidia ist bereit, diese bereitzustellen.Während seiner GTC-Keynote am Montag kündigte Huan
 Das Pentagon schließt Vereinbarungen mit Nvidia, Microsoft und AWS ab, um KI in gesicherten Netzwerken einzusetzen.
Nachdem zuvor Einigungen mit Google, SpaceX und OpenAI erreicht worden waren, gab das US-Verteidigungsministerium am Freitag bekannt, dass es nun auch Vereinbarungen mit Nvidia, Microsoft, Amazon Web Services und Reflection AI unterzeichnet hat, um d
Das Pentagon schließt Vereinbarungen mit Nvidia, Microsoft und AWS ab, um KI in gesicherten Netzwerken einzusetzen.
Nachdem zuvor Einigungen mit Google, SpaceX und OpenAI erreicht worden waren, gab das US-Verteidigungsministerium am Freitag bekannt, dass es nun auch Vereinbarungen mit Nvidia, Microsoft, Amazon Web Services und Reflection AI unterzeichnet hat, um d
 Nvidia stellt auf der GTC NemoClaw, den Roboter Olaf und eine 1-Billionen-Dollar-Wette vor
Der Player wird geladen…CEO Jensen Huang betrat diese Woche in seiner charakteristischen Lederjacke die Bühne der GTC-Konferenz von Nvidia, um eine zweieinhalbstündige Keynote zu halten, in der er bis
Nvidia stellt auf der GTC NemoClaw, den Roboter Olaf und eine 1-Billionen-Dollar-Wette vor
Der Player wird geladen…CEO Jensen Huang betrat diese Woche in seiner charakteristischen Lederjacke die Bühne der GTC-Konferenz von Nvidia, um eine zweieinhalbstündige Keynote zu halten, in der er bis

Die besten KI-basierten Spesenmanager 2026: Erstklassige Tools zum Scannen von Belegen und zur automatischen Kategorisierung von Unternehmensausgaben. Entdecken Sie leistungsstarke, bahnbrechende Lösungen für müheloses Spesenmanagement, präzise Finanzüberwachung und optimierte Compliance. Unser sorgfältig zusammengestellter, wöchentlich aktualisierter Vergleich zwischen kostenlosen und kostenpflichtigen Optionen hilft Ihnen dabei, die perfekte Lösung zu finden. Nutzen Sie Ihren KI-Vorteil mit den Expertenempfehlungen von XIX.AI.
10 Tools
xix.ai

Entdecken Sie auf XIX.AI die besten KI-Tools für die Personalbeschaffung des Jahres 2026. Unsere sorgfältig zusammengestellte Liste umfasst leistungsstarke, bahnbrechende Lösungen für die Sichtung von Lebensläufen und die automatisierte Terminplanung für Vorstellungsgespräche. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von Praxistests und wöchentlich aktualisierten Rankings. Finden Sie Ihren perfekten Assistenten für die Personalbeschaffung und optimieren Sie noch heute Ihren Rekrutierungsprozess!
10 Tools
xix.ai

Entdecken Sie auf XIX.AI die besten KI-basierten Coaches für persönliches Wohlbefinden und Konzentration des Jahres 2026. Unsere sorgfältig zusammengestellte Rangliste umfasst erstklassige, bahnbrechende Tools zur Bewältigung von Burnout und zur Steigerung der mentalen Energie. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von Erfahrungsberichten aus der Praxis. Schlagen Sie noch heute den Weg zu höchster Produktivität und Wohlbefinden ein.
10 Tools
xix.ai

Entdecken Sie die besten KI-Romantik-Chatbots des Jahres 2026, mit denen Sie echte, langfristige Beziehungen aufbauen können. Unsere sorgfältig zusammengestellte Liste bietet Ihnen überzeugende, konsistente Persönlichkeiten, Vergleiche zwischen kostenlosen und kostenpflichtigen Angeboten sowie Tests aus der Praxis. Finden Sie Ihren perfekten Begleiter und legen Sie noch heute bei XIX.AI los.
10 Tools
xix.ai

Entdecken Sie die besten AI-Data-Science-Mentoren von 2026, um SQL, Pandas und ML-Arbeitsabläufe zu meistern. Erfahren Sie mehr über unsere hochbewerteten, sorgfältig ausgewählten Angebote bei XIX.AI – für effektive und bahnbrechende Anleitung. Vergleichen Sie kostenlose und bezahlte Optionen mit praktischen Einblicken aus der Praxis. Entfalten Sie Ihr Potenzial in der Data Science noch heute.
10 Tools
xix.ai
Entdecken Sie auf XIX.AI die besten KI-Flirt- und Konversationstrainer des Jahres 2026. Unsere sorgfältig zusammengestellte, erstklassige Auswahl hilft Ihnen dabei, Ihr soziales Charisma und Ihr Selbstvertrauen in Echtzeit zu stärken. Entdecken Sie unverzichtbare, bahnbrechende Tools mit Vergleichen zwischen kostenlosen und kostenpflichtigen Angeboten sowie wöchentlich aktualisierten Rankings. Schaffen Sie sich noch heute einen sozialen Vorsprung.
10 Tools
xix.ai













