
















 Maison
Maison
Intel RealSense présente un robot humanoïde capable de se déplacer de manière autonome lors de la GTC
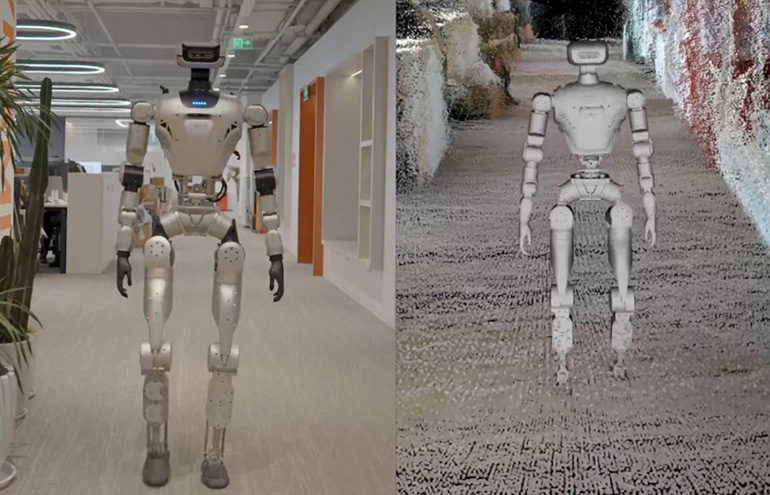
LimX fait la démonstration d'une navigation sécurisée grâce aux caméras RealSense et à NVIDIA CuVSLAM. Source : RealSense
Alors que les robots humanoïdes passent du stade de prototypes à celui d'applications pratiques, une perception fiable devient essentielle pour la sécurité, et pas seulement pour les performances. RealSense a insisté sur ce point lors de la conférence NVIDIA GTC cette semaine, en présentant des capacités de navigation avancées développées avec LimX Dynamics.
« Les humanoïdes évoluent dans des espaces tridimensionnels complexes aux côtés des humains, au sein d’environnements en constante évolution », a déclaré Nadav Orbach, PDG de RealSense. « Pour que les robots puissent travailler en toute sécurité avec les humains, leurs systèmes de perception doivent faire plus que simplement traiter les données brutes des capteurs. Ils doivent fonctionner comme un cortex visuel, permettant une localisation précise, l’évitement d’obstacles, la compréhension du terrain et des mouvements stables et prévisibles dans des environnements non structurés. »
Issue d’une scission d’Intel Corp. l’année dernière, RealSense fournit des caméras de profondeur et des systèmes de vision pour les robots mobiles autonomes (AMR), les humanoïdes et diverses applications dans l’automatisation industrielle, les soins de santé et le contrôle d’accès. La société basée à Cupertino, en Californie, a déclaré que sa technologie de perception permet aux machines et à l’IA physique de naviguer et d’interagir avec le monde humain de manière fiable et intelligente.
RealSense propose un « cortex visuel » pour les robots humanoïdes
« Les caméras, la perception avancée et les logiciels de raisonnement qui dotent les robots de la vue sont bien plus que de simples outils de navigation ou d’exécution de tâches », a expliqué RealSense. « Ils font office de cortex visuel pour les humanoïdes, leur permettant de se déplacer, de travailler et d’opérer efficacement dans des environnements humains. »
La société affirme que sa démonstration de navigation autonome d’humanoïdes lors de la GTC à San Jose, en Californie, est une première dans le secteur. LimX Dynamics prévoit de montrer comment la perception de profondeur 3D dense permet aux robots à pattes de se localiser, de cartographier et de naviguer de manière autonome, en toute sécurité et de manière prévisible.
Leur système utilise des caméras de profondeur RealSense avec vSLAM (localisation et cartographie visuelles simultanées), intégrées à l’odométrie de NVIDIA CuVSLAM. NVIDIA Isaac Lab a accéléré le développement de cette pile technologique, en fournissant un environnement numérique haute fidélité pour l’apprentissage par renforcement et l’entraînement des politiques.
Basée à Shenzhen, en Chine, LimX Dynamics a déclaré que cette approche axée sur la simulation avait permis de combler le fossé entre « simulation et réalité », permettant à son humanoïde de maîtriser des manœuvres 3D complexes avec une sécurité vérifiée avant ses débuts physiques lors de la conférence NVIDIA GTC.
Les humanoïdes ont besoin de navigation dans des espaces 3D
Les robots à roues se déplacent généralement sur un plan plat et prévisible, en privilégiant la vitesse et l'efficacité — les aspirateurs robotisés en sont un excellent exemple, selon RealSense.
Cependant, les humanoïdes et les quadrupèdes représentent un défi bien plus grand, a noté l’entreprise. Ils se déplacent dans des espaces 3D complets, ce qui implique des points de contact changeants et des mouvements non linéaires. Cela exige un placement stable des pieds et une conscience constante de l’environnement.
« L'odométrie par encodeur seul et le lidar 2D, couramment utilisés pour les robots à roues, ne disposent pas de la perception 3D complète nécessaire à un mouvement stable et sûr », affirme RealSense. « Jusqu'à présent, cette limitation a freiné le déploiement, obligeant de nombreux robots à pattes à recourir à la téléopération, à une supervision étroite ou à des environnements strictement contrôlés. »
Note de la rédaction : Mike Nielsen, directeur marketing chez RealSense, participera à une table ronde sur « L'état des humanoïdes » lors du 2026 Robotics Summit & Expo.
LimX Dynamics va présenter une voie plus sûre pour la robotique
Les partenaires ont déclaré qu’ils démontreraient comment la perception de profondeur dense de RealSense, combinée à l’odométrie visuelle de NVIDIA et à cuVSLAM, permet la compréhension de la scène, la localisation, la cartographie et la navigation. Cela permet à l’humanoïde de LimX d’évoluer en toute sécurité dans un espace 3D.
Concrètement, ils ont souligné qu'une robotique plus sûre implique :
Une localisation et une cartographie précises, garantissant que le robot connaît toujours sa position et son environnement.L'évitement des collisions avec les personnes et les objets en mouvement.La prévention des chutes et une locomotion stable grâce à une perception 3D du terrain, des bords et des changements de hauteur.Des mouvements prévisibles et compréhensibles par l'humain, minimisant les arrêts brusques ou les corrections erratiques.« La perception 3D dense ouvre également la voie à de nouveaux comportements qui ont toujours été difficiles à exécuter en toute sécurité », a expliqué RealSense. « Il s’agit notamment de la navigation dans les escaliers, de la détection des bordures et des dénivelés, de la traversée de terrains accidentés et de l’évitement dynamique d’obstacles dans les espaces partagés. La planification avancée des trajectoires permet aux robots de s’adapter à des conditions changeantes, telles que des chariots en mouvement, des palettes qui se déplacent ou des personnes qui entrent sur leur chemin. »
RealSense a déclaré que la démonstration de LimX Dynamics met en évidence son rôle croissant dans l’écosystème robotique au sens large. La société a souligné une décennie d’innovation en matière de détection de profondeur, notamment la technologie stéréo active optimisée pour la détection à courte et moyenne portée, ainsi qu’un écosystème mature de kits de développement logiciel (SDK).
De plus, RealSense a déclaré avoir aidé les équipes de robotique à prototyper et à mettre à l'échelle leurs projets plus efficacement, et accélérer le développement d'une autonomie sûre pour les systèmes humanoïdes.
Article connexe
 La variante OpenClaw de Nvidia pourrait résoudre son plus grand défi : la sécurité
Jensen Huang, PDG de Nvidia, estime que chaque entreprise a besoin d'une stratégie OpenClaw — et Nvidia est prête à la fournir.Lors de son discours d'ouverture de la GTC lundi, M. Huang a an
Le Pentagone signe des accords avec Nvidia, Microsoft et AWS pour déployer l’intelligence artificielle sur les réseaux classés.
Après avoir précédemment conclu des accords avec Google, SpaceX et OpenAI, le Département de la Défense américain a annoncé vendredi qu’il avait signé des contrats avec Nvidia, Microsoft, Amazon Web Services et Reflection AI pour mettre en œuvre leur
La conférence GTC de Nvidia dévoile NemoClaw, le robot Olaf et un pari d'un billion de dollars
Chargement du lecteur…Le PDG Jensen Huang est monté sur scène cette semaine lors de la conférence GTC de Nvidia, vêtu de sa veste en cuir emblématique, pour prononcer un discours de deux heures et dem
Recommandations de sujets spéciaux liés
Création de bande dessinée
La variante OpenClaw de Nvidia pourrait résoudre son plus grand défi : la sécurité
Jensen Huang, PDG de Nvidia, estime que chaque entreprise a besoin d'une stratégie OpenClaw — et Nvidia est prête à la fournir.Lors de son discours d'ouverture de la GTC lundi, M. Huang a an
Le Pentagone signe des accords avec Nvidia, Microsoft et AWS pour déployer l’intelligence artificielle sur les réseaux classés.
Après avoir précédemment conclu des accords avec Google, SpaceX et OpenAI, le Département de la Défense américain a annoncé vendredi qu’il avait signé des contrats avec Nvidia, Microsoft, Amazon Web Services et Reflection AI pour mettre en œuvre leur
La conférence GTC de Nvidia dévoile NemoClaw, le robot Olaf et un pari d'un billion de dollars
Chargement du lecteur…Le PDG Jensen Huang est monté sur scène cette semaine lors de la conférence GTC de Nvidia, vêtu de sa veste en cuir emblématique, pour prononcer un discours de deux heures et dem
Recommandations de sujets spéciaux liés
Création de bande dessinée
 Les meilleurs générateurs IA pour les mangas shonen : créez des séquences d'action survoltées et des effets d'énergie
Les meilleurs générateurs IA pour les mangas shonen : créez des séquences d'action survoltées et des effets d'énergie
Découvrez les meilleurs générateurs IA de mangas shonen de 2026 sur XIX.AI. Notre sélection triée sur le volet comprend des outils performants pour créer des séquences d'action à couper le souffle et des effets d'énergie dynamiques. Comparez les options gratuites et payantes grâce à des tests concrets. Libérez votre potentiel créatif et commencez dès aujourd'hui à créer des mangas épiques !
 15 outils
15 outils
 xix.ai
Entreprise
Les meilleurs outils de suivi des dépenses basés sur l'IA : numérisez vos reçus et classez automatiquement les dépenses de l'entreprise
xix.ai
Entreprise
Les meilleurs outils de suivi des dépenses basés sur l'IA : numérisez vos reçus et classez automatiquement les dépenses de l'entreprise
Les meilleurs outils de gestion des dépenses basés sur l'IA en 2026 : les outils les mieux notés pour numériser vos reçus et classer automatiquement les dépenses de votre entreprise. Découvrez des solutions puissantes et révolutionnaires pour une gestion des dépenses sans effort, un suivi financier précis et une conformité simplifiée. Notre comparatif, mis à jour chaque semaine, qui oppose les options gratuites aux options payantes, vous aide à trouver la solution qui vous convient le mieux. Tirez pleinement parti de l'IA grâce aux recommandations d'experts de XIX.AI.
10 outils
xix.ai
Entreprise
Les meilleurs outils de recrutement basés sur l'IA : triez les CV et automatisez la planification des entretiens avec les candidats
Découvrez les meilleurs outils de recrutement basés sur l'IA de 2026 sur XIX.AI. Notre sélection propose des solutions performantes et révolutionnaires pour l'analyse des CV et l'automatisation de la planification des entretiens avec les candidats. Comparez les options gratuites et payantes grâce à des tests concrets et à des classements mis à jour chaque semaine. Trouvez l'assistant de recrutement idéal et optimisez votre processus de recrutement dès aujourd'hui !
10 outils
xix.ai
Productivité
Coaches IA dédiés au bien-être et à la concentration : gérer l'épuisement professionnel et booster son énergie mentale
Découvrez sur XIX.AI les meilleurs coachs IA de 2026 spécialisés dans le bien-être personnel et la concentration. Notre classement, soigneusement établi, présente les outils les mieux notés et les plus innovants pour gérer le surmenage et booster votre énergie mentale. Comparez les options gratuites et payantes grâce à des avis concrets. Ouvrez-vous dès aujourd’hui la voie vers une productivité et un bien-être optimaux.
10 outils
xix.ai
chatbot
Les meilleurs chatbots romantiques basés sur l'IA : nouez des relations durables grâce à des personnalités cohérentes
Découvrez les meilleurs chatbots romantiques basés sur l'IA de 2026, sélectionnés pour vous aider à nouer des relations authentiques et durables. Notre sélection comprend des personnalités fortes et cohérentes, des comparaisons entre versions gratuites et payantes, ainsi que des tests en conditions réelles. Trouvez le compagnon idéal et commencez dès aujourd'hui sur XIX.AI.
10 outils
xix.ai
Éducation et apprentissage
Meilleurs mentors en science des données et intelligence artificielle : maîtrise de SQL, Pandas et des workflows d'apprentissage automatique
Découvrez les meilleurs mentors en sciences des données et en intelligence artificielle pour 2026 afin de maîtriser SQL, Pandas et les workflows d'apprentissage automatique. Explorez notre sélection soigneusement élaborée sur XIX.AI pour bénéficier d'une guidance puissante et révolutionnaire. Comparez les options gratuites et payantes en tenant compte de perspectives pratiques. Développez rapidement vos compétences en sciences des données.
10 outils
xix.ai

 commentaires (0)
commentaires (0)
LimX fait la démonstration d'une navigation sécurisée grâce aux caméras RealSense et à NVIDIA CuVSLAM. Source : RealSense
Alors que les robots humanoïdes passent du stade de prototypes à celui d'applications pratiques, une perception fiable devient essentielle pour la sécurité, et pas seulement pour les performances. RealSense a insisté sur ce point lors de la conférence NVIDIA GTC cette semaine, en présentant des capacités de navigation avancées développées avec LimX Dynamics.
« Les humanoïdes évoluent dans des espaces tridimensionnels complexes aux côtés des humains, au sein d’environnements en constante évolution », a déclaré Nadav Orbach, PDG de RealSense. « Pour que les robots puissent travailler en toute sécurité avec les humains, leurs systèmes de perception doivent faire plus que simplement traiter les données brutes des capteurs. Ils doivent fonctionner comme un cortex visuel, permettant une localisation précise, l’évitement d’obstacles, la compréhension du terrain et des mouvements stables et prévisibles dans des environnements non structurés. »
Issue d’une scission d’Intel Corp. l’année dernière, RealSense fournit des caméras de profondeur et des systèmes de vision pour les robots mobiles autonomes (AMR), les humanoïdes et diverses applications dans l’automatisation industrielle, les soins de santé et le contrôle d’accès. La société basée à Cupertino, en Californie, a déclaré que sa technologie de perception permet aux machines et à l’IA physique de naviguer et d’interagir avec le monde humain de manière fiable et intelligente.
RealSense propose un « cortex visuel » pour les robots humanoïdes
« Les caméras, la perception avancée et les logiciels de raisonnement qui dotent les robots de la vue sont bien plus que de simples outils de navigation ou d’exécution de tâches », a expliqué RealSense. « Ils font office de cortex visuel pour les humanoïdes, leur permettant de se déplacer, de travailler et d’opérer efficacement dans des environnements humains. »
La société affirme que sa démonstration de navigation autonome d’humanoïdes lors de la GTC à San Jose, en Californie, est une première dans le secteur. LimX Dynamics prévoit de montrer comment la perception de profondeur 3D dense permet aux robots à pattes de se localiser, de cartographier et de naviguer de manière autonome, en toute sécurité et de manière prévisible.
Leur système utilise des caméras de profondeur RealSense avec vSLAM (localisation et cartographie visuelles simultanées), intégrées à l’odométrie de NVIDIA CuVSLAM. NVIDIA Isaac Lab a accéléré le développement de cette pile technologique, en fournissant un environnement numérique haute fidélité pour l’apprentissage par renforcement et l’entraînement des politiques.
Basée à Shenzhen, en Chine, LimX Dynamics a déclaré que cette approche axée sur la simulation avait permis de combler le fossé entre « simulation et réalité », permettant à son humanoïde de maîtriser des manœuvres 3D complexes avec une sécurité vérifiée avant ses débuts physiques lors de la conférence NVIDIA GTC.
Les humanoïdes ont besoin de navigation dans des espaces 3D
Les robots à roues se déplacent généralement sur un plan plat et prévisible, en privilégiant la vitesse et l'efficacité — les aspirateurs robotisés en sont un excellent exemple, selon RealSense.
Cependant, les humanoïdes et les quadrupèdes représentent un défi bien plus grand, a noté l’entreprise. Ils se déplacent dans des espaces 3D complets, ce qui implique des points de contact changeants et des mouvements non linéaires. Cela exige un placement stable des pieds et une conscience constante de l’environnement.
« L'odométrie par encodeur seul et le lidar 2D, couramment utilisés pour les robots à roues, ne disposent pas de la perception 3D complète nécessaire à un mouvement stable et sûr », affirme RealSense. « Jusqu'à présent, cette limitation a freiné le déploiement, obligeant de nombreux robots à pattes à recourir à la téléopération, à une supervision étroite ou à des environnements strictement contrôlés. »
Note de la rédaction : Mike Nielsen, directeur marketing chez RealSense, participera à une table ronde sur « L'état des humanoïdes » lors du 2026 Robotics Summit & Expo.
LimX Dynamics va présenter une voie plus sûre pour la robotique
Les partenaires ont déclaré qu’ils démontreraient comment la perception de profondeur dense de RealSense, combinée à l’odométrie visuelle de NVIDIA et à cuVSLAM, permet la compréhension de la scène, la localisation, la cartographie et la navigation. Cela permet à l’humanoïde de LimX d’évoluer en toute sécurité dans un espace 3D.
Concrètement, ils ont souligné qu'une robotique plus sûre implique :
Une localisation et une cartographie précises, garantissant que le robot connaît toujours sa position et son environnement.L'évitement des collisions avec les personnes et les objets en mouvement.La prévention des chutes et une locomotion stable grâce à une perception 3D du terrain, des bords et des changements de hauteur.Des mouvements prévisibles et compréhensibles par l'humain, minimisant les arrêts brusques ou les corrections erratiques.« La perception 3D dense ouvre également la voie à de nouveaux comportements qui ont toujours été difficiles à exécuter en toute sécurité », a expliqué RealSense. « Il s’agit notamment de la navigation dans les escaliers, de la détection des bordures et des dénivelés, de la traversée de terrains accidentés et de l’évitement dynamique d’obstacles dans les espaces partagés. La planification avancée des trajectoires permet aux robots de s’adapter à des conditions changeantes, telles que des chariots en mouvement, des palettes qui se déplacent ou des personnes qui entrent sur leur chemin. »
RealSense a déclaré que la démonstration de LimX Dynamics met en évidence son rôle croissant dans l’écosystème robotique au sens large. La société a souligné une décennie d’innovation en matière de détection de profondeur, notamment la technologie stéréo active optimisée pour la détection à courte et moyenne portée, ainsi qu’un écosystème mature de kits de développement logiciel (SDK).
De plus, RealSense a déclaré avoir aidé les équipes de robotique à prototyper et à mettre à l'échelle leurs projets plus efficacement, et accélérer le développement d'une autonomie sûre pour les systèmes humanoïdes.










 La variante OpenClaw de Nvidia pourrait résoudre son plus grand défi : la sécurité
Jensen Huang, PDG de Nvidia, estime que chaque entreprise a besoin d'une stratégie OpenClaw — et Nvidia est prête à la fournir.Lors de son discours d'ouverture de la GTC lundi, M. Huang a an
La variante OpenClaw de Nvidia pourrait résoudre son plus grand défi : la sécurité
Jensen Huang, PDG de Nvidia, estime que chaque entreprise a besoin d'une stratégie OpenClaw — et Nvidia est prête à la fournir.Lors de son discours d'ouverture de la GTC lundi, M. Huang a an
 Le Pentagone signe des accords avec Nvidia, Microsoft et AWS pour déployer l’intelligence artificielle sur les réseaux classés.
Après avoir précédemment conclu des accords avec Google, SpaceX et OpenAI, le Département de la Défense américain a annoncé vendredi qu’il avait signé des contrats avec Nvidia, Microsoft, Amazon Web Services et Reflection AI pour mettre en œuvre leur
Le Pentagone signe des accords avec Nvidia, Microsoft et AWS pour déployer l’intelligence artificielle sur les réseaux classés.
Après avoir précédemment conclu des accords avec Google, SpaceX et OpenAI, le Département de la Défense américain a annoncé vendredi qu’il avait signé des contrats avec Nvidia, Microsoft, Amazon Web Services et Reflection AI pour mettre en œuvre leur
 La conférence GTC de Nvidia dévoile NemoClaw, le robot Olaf et un pari d'un billion de dollars
Chargement du lecteur…Le PDG Jensen Huang est monté sur scène cette semaine lors de la conférence GTC de Nvidia, vêtu de sa veste en cuir emblématique, pour prononcer un discours de deux heures et dem
La conférence GTC de Nvidia dévoile NemoClaw, le robot Olaf et un pari d'un billion de dollars
Chargement du lecteur…Le PDG Jensen Huang est monté sur scène cette semaine lors de la conférence GTC de Nvidia, vêtu de sa veste en cuir emblématique, pour prononcer un discours de deux heures et dem
Découvrez les meilleurs générateurs IA de mangas shonen de 2026 sur XIX.AI. Notre sélection triée sur le volet comprend des outils performants pour créer des séquences d'action à couper le souffle et des effets d'énergie dynamiques. Comparez les options gratuites et payantes grâce à des tests concrets. Libérez votre potentiel créatif et commencez dès aujourd'hui à créer des mangas épiques !
15 outils
xix.ai

Les meilleurs outils de gestion des dépenses basés sur l'IA en 2026 : les outils les mieux notés pour numériser vos reçus et classer automatiquement les dépenses de votre entreprise. Découvrez des solutions puissantes et révolutionnaires pour une gestion des dépenses sans effort, un suivi financier précis et une conformité simplifiée. Notre comparatif, mis à jour chaque semaine, qui oppose les options gratuites aux options payantes, vous aide à trouver la solution qui vous convient le mieux. Tirez pleinement parti de l'IA grâce aux recommandations d'experts de XIX.AI.
10 outils
xix.ai

Découvrez les meilleurs outils de recrutement basés sur l'IA de 2026 sur XIX.AI. Notre sélection propose des solutions performantes et révolutionnaires pour l'analyse des CV et l'automatisation de la planification des entretiens avec les candidats. Comparez les options gratuites et payantes grâce à des tests concrets et à des classements mis à jour chaque semaine. Trouvez l'assistant de recrutement idéal et optimisez votre processus de recrutement dès aujourd'hui !
10 outils
xix.ai

Découvrez sur XIX.AI les meilleurs coachs IA de 2026 spécialisés dans le bien-être personnel et la concentration. Notre classement, soigneusement établi, présente les outils les mieux notés et les plus innovants pour gérer le surmenage et booster votre énergie mentale. Comparez les options gratuites et payantes grâce à des avis concrets. Ouvrez-vous dès aujourd’hui la voie vers une productivité et un bien-être optimaux.
10 outils
xix.ai

Découvrez les meilleurs chatbots romantiques basés sur l'IA de 2026, sélectionnés pour vous aider à nouer des relations authentiques et durables. Notre sélection comprend des personnalités fortes et cohérentes, des comparaisons entre versions gratuites et payantes, ainsi que des tests en conditions réelles. Trouvez le compagnon idéal et commencez dès aujourd'hui sur XIX.AI.
10 outils
xix.ai

Découvrez les meilleurs mentors en sciences des données et en intelligence artificielle pour 2026 afin de maîtriser SQL, Pandas et les workflows d'apprentissage automatique. Explorez notre sélection soigneusement élaborée sur XIX.AI pour bénéficier d'une guidance puissante et révolutionnaire. Comparez les options gratuites et payantes en tenant compte de perspectives pratiques. Développez rapidement vos compétences en sciences des données.
10 outils
xix.ai













