
















 首頁
首頁振動監測可提升移動機器人在不平坦地形上的穩定性

無人地面載具(UGV)可借助振動感測器在崎嶇地形中行駛。來源:ckybe, AI,經由 Adobe Stock
幾年前,在一次實地測試中,我們有一輛中型無人地面載具(UGV)試圖攀爬一片看似無害的崎嶇地面。地形並不極端——只是些鬆散的石頭、一點塵土,以及一個緩坡。看起來根本無需擔心。
爬到半山腰時,機器人停了下來。接著其中一個車輪微微下陷,底盤向前傾斜,在任何人來得及介入之前,它便翻倒了。
奇怪的是?攝影機畫面看起來很正常。雷達也未偵測到任何重大危險。根據數據,這條路徑理應是「安全的」。
然而,機器人比我們更早察覺到異狀。只是它無法將這種感覺轉化為實際行動。
這種機器人所「看見」與實際「體感」之間的脫節,正是移動機器人在不平坦地面上維持穩定的核心難題。
在現實世界中,地形往往具有欺騙性。某個表面看似堅實,但在承重時卻可能變得鬆散如粉末;岩石可能隱藏在薄薄的土壤層之下;即使是淺淺的車轍,也可能重新分配載荷,足以將無人地面載具(UGV)推過其傾覆臨界點。而一旦發生傾覆,復原過程往往難以順利。
當今的導航系統仍主要依賴視覺驅動。相機、雷射雷達(LiDAR)和同步定位與映射(SLAM)技術雖能出色地進行地圖建構,卻無法預知地面在行駛通過時的實際反應。這正是系統失效的根源。
振動監測提供了一種不同的解決方案。機器人不再僅依賴外部感知,而是開始傾聽自身狀態。每一次顛簸、微小打滑與衝擊都會產生數據。當你認真對待這些訊號時,它們便能轉化為預測依據。
試想一個人走在鬆散的碎石上。你不會用視覺分析每一步,而是透過感覺。腳下細微的變化會告訴你何時該放慢腳步、調整平衡,或是改變方向。
這正是我們致力於賦予機器人的感知能力。
以下內容並非理論探討,而是基於實務經驗:如何擷取振動數據、這些數據揭示了什麼,以及如何運用它們來確保機器人在地面狀況難以預測時仍能保持穩定。
為何振動訊號對穩定性至關重要
讓我們從工程師常問的一個根本問題開始:振動究竟如何影響穩定性?
簡短的答案是:振動不僅影響穩定性——更揭示了穩定性。
每當車輪與地面接觸時,都會產生一股作用力。這股作用力並非恆定不變,而是會隨著地面是堅硬、鬆軟、不平整或正在移動而產生變化。這些變化會以振動的形式傳遞至機器人全身。
若忽略這些訊號,它們僅是雜訊;若加以分析,它們便成為洞見。
在一次越野測試中,我們駕駛同一台機器人穿越三種地表:緊實的泥土、鬆散的礫石,以及鬆軟的沙地。從視覺上來看,這三種地表似乎都難以駕馭。但它們的振動特徵卻截然不同。
在壓實的泥土上,訊號穩定——振幅低且波形平穩。
在礫石路面,訊號變得混亂,伴隨著尖銳的突波與高頻顫動。
在沙地上,一切都變慢了。訊號變得沉重,幾乎有些遲滯,伴隨著明顯的低頻振盪。這種區別至關重要。
高頻尖峰通常代表撞擊——撞上岩石、碎石或硬質邊緣。這些瞬間可能突然改變載荷分布,並引發不穩定。
低頻振盪雖較為隱晦,但同樣危險。它們往往預示著支撐力的喪失,例如車輪下陷或打滑。你不會感受到突如其來的顫動;相反地,穩定性會逐漸被侵蝕。
關鍵在於:你往往在目睹這些現象之前,便已感受到其影響。
我們在探測車測試中曾遇到這種情況。某段地形看似平坦,是因為埋藏的岩石被薄薄一層沙子覆蓋。攝影機顯示地面平坦,雷射測距儀也偵測到光滑的表面。
但慣性測量單元(IMU)卻揭示了另一種狀況。車輪一碾過隱藏的岩石,振動訊號便立即出現高頻尖峰。這提供了早期預警——在機器人開始失穩之前。
這就是振動感測的威力。它不依賴於能見度,不受光線或塵埃影響,而是真實反映了接觸時的物理狀態。
在嚴苛的環境中,這往往是唯一重要的真相。
振動監測的核心感測器
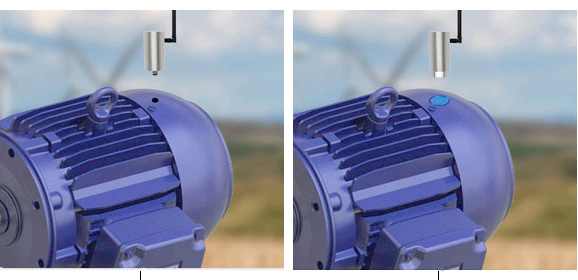
若說振動是訊號,感測器便是您的耳朵。如同任何感測系統,感測器的安裝位置與品質的重要性,往往超乎多數人的想像。
核心部分,您需要運用三種元件:加速度計、陀螺儀以及慣性測量單元(IMU)。
加速度計承擔了主要工作。它們測量三軸方向的線性加速度,既能捕捉衝擊,也能記錄持續性振動。若車輪撞上岩石,加速度計會立即偵測到;若底盤產生震盪,同樣會被記錄下來。
陀螺儀則提供了另一層次的功能。它們追蹤角運動——即滾轉、俯仰和偏航。這能讓你知道機器人是否開始傾斜,或是以可能導致翻倒的方式旋轉。
將這兩者結合,便構成了一個慣性測量單元(IMU)。大多數現代系統都依賴 IMU,因為它們能提供完整的運動圖像。
但實際經驗表明,感測器的安裝位置與感測器本身同樣重要。
將 IMU 安裝在質量中心是標準做法,且有其道理。這能為整體運動提供穩定的參考基準。然而,若僅此而已,您將錯失關鍵細節。
在崎嶇地形上,大部分的動態變化都發生在車輪處。我們透過在更靠近輪組的位置添加次級加速度計,取得了更佳的結果。這些加速度計能捕捉到局部衝擊,而這些衝擊並不會完全傳遞到底盤中心。
另一個常見的錯誤是「軟性安裝」。這看似微不足道,實則影響重大。若感測器支架即使僅有輕微彎曲,你所測量的就不再是真實的振動——而是經過濾波的版本。這將導致錯誤的結論。
採樣率是另一項實務考量。對多數移動機器人而言,100 至 500 Hz 的範圍已足夠。若過低,會錯失關鍵事件;若過高,則會增加處理負載卻無實質效益。
至於硬體方面,無需採用特殊元件。許多可靠的加速度計感測器既能應對嚴苛環境,又不致超出預算。校準與一致性才是更關鍵的因素。
即時振動處理技術
原始振動數據往往雜亂無章。若您曾直接將IMU的數據繪製成圖,便會明白我的意思——那看起來就像是雜訊。
訣竅不在於將其完全淨化,而在於進行適度處理以揭示其中規律。
第一步是濾波。馬達、變速箱,甚至結構共振都會引入自身的振動。若不處理這些干擾,它們將淹沒地形信號。
我們通常先使用帶通濾波器,以隔離地形交互作用發生的頻率範圍。接著,若存在已知的噪聲源(例如以固定頻率運轉的馬達),我們會套用陷波濾波器來移除它。
我曾見過案例,僅僅一個簡單的陷波濾波器,就能將無法使用的數據轉化為清晰的地形特徵。一旦訊號變得可用,便進入分析階段。
時域分析能顯示訊號的演變過程,但頻域分析才是真正有趣的部分。透過 FFT,您可以精確觀察能量集中於何處。
不同地形會留下獨特的指紋。礫石會將能量分散至高頻段;草地則集中於中頻範圍;沙地則會將所有頻段向低頻偏移並加以衰減。
接著,你便從中提取特徵。不需要數十個——只需幾個有意義的即可。均方根振幅、頻譜功率,或許還有方差。通常這樣就足夠了。
我們曾僅憑這幾個特徵建構出一個簡單的地形分類器,在低速行駛時便達到了近 90% 的準確度。沒有花俏的技術——沒有深度學習。僅憑乾淨的數據與良好的特徵選擇。
關鍵啟示是什麼?你未必總需要複雜的模型。你需要的是優質的訊號。
三軸振動感測器的不同連接方式。來源:ATO
透過振動數據預測穩定性
這正是事情變得有趣之處。多數系統都是在失穩發生後才做出反應。屆時,你已經陷入困境。振動監測讓你能從被動反應轉向主動預測。
傳統上,工程師依賴穩定裕度或力分布模型等指標。這些方法在受控環境下效果良好,但當地形行為發生不可預測的變化時,便難以應對。
振動數據填補了這項缺口。與其純粹透過模型估算力值,不如從實際交互作用中推斷。這使得您的穩定性評估更貼近現實。
近期,基於機器學習的方法在此領域逐漸受到重視。將加速度、角速度和速度數據輸入模型,系統便會輸出一個穩定性評分。
令人驚豔的是,這些模型的泛化能力極佳。
在一項測試中,我們先在草地、碎石和泥土上訓練模型,隨後將其應用於從未接觸過的混合地形。其表現依然出色——雖非完美,但已具實用價值。
實際上,這使得「閘控」等行為成為可能。
我們有一台配備小型機械臂的無人地面載具(UGV)。當振動強度超過閾值時,系統會自動暫停機械臂的動作。僅憑這項機制,就成功避免了數起險些翻覆的事故。
此處的關鍵不在於模型本身,而在於穩定性已從事後檢核轉變為持續監控的對象。
提升平衡能力的控制策略
一旦您信任振動數據,便可開始將其應用於控制。最簡單的方法是速度適應——這也是最有效的方法之一。當振動增加時,減速。僅此而已。
聽起來很基礎,但之所以有效,是因為大多數不穩定問題都與速度成正比。降低速度意味著動態力道減小,讓系統有更多時間做出反應。
除此之外,您還能將振動數據導入控制迴路中。例如,PID 控制器若能獲得反映干擾程度的額外輸入,將能發揮更大效益。這有助於減少振盪並改善響應。
感測器融合同樣發揮著作用。單純的振動數據雖已相當有力,但若結合里程計或視覺回饋,其可靠性將更上一層樓。
我們觀察到的一項實用改進,來自於消除內部雜訊。透過過濾掉內部元件產生的機械振動,控制系統變得明顯更平順——抖動減少,平衡性更佳。
有時,穩定性的提升並非來自增加複雜度,而是來自消除雜訊。
實作挑戰與解決方案
當然,這些並非即插即用。雜訊是最大的挑戰。並非所有振動都有用。有些來自馬達,有些來自結構,有些來自環境。目標是在不丟失重要資訊的前提下,將訊號與雜訊分離。

一款用於機器人與無人機的小型 IMU 感測器。來源:ATO
感測器漂移是另一個問題,尤其是陀螺儀。微小的誤差會隨時間累積。這正是卡爾曼濾波等感測器融合技術變得至關重要的原因。
此外還有變異性問題。只要改變機器人的速度或載重,其振動特徵也會隨之改變。若系統未針對此進行設計,性能便會迅速下降。
唯一的真正解決方案就是測試——不是受控的實驗室測試,而是真實地形、真實環境、真實的邊界案例。這才是系統真正展現實力的時刻。
機器人需要感知地面
若要歸納一個核心要點,那就是:機器人需要「感知」地面,而不僅是「看見」地面。
移動機器人在崎嶇地形上的穩定性,無法僅靠更精準的地圖來解決。這需要機器與環境之間建立更深層的連結。
振動監測正是建立這種連結的關鍵。它能將撞擊、打滑及細微位移轉化為可用的數據,讓機器人得以預判問題,而非僅是被動應對。在一個失誤便可能導致任務終止的環境中,這將產生決定性的差異。
這項技術並非遙不可及。一套穩固的慣性測量單元(IMU)配置、周詳的資料處理,以及實地測試,便能助你走得很遠。接下來,就是不斷迭代。
因為地形總會給你帶來意外。目標是確保你的機器人不會被意外困住太久。
 關於作者
關於作者
Faisal Mahmood 是一位資深數位行銷與科技內容策略專家,在人工智慧、軟體開發及 SEO 導向內容領域擁有豐富經驗。他專精於撰寫經過深度研究、基於事實的文章,協助開發者、企業及技術團隊理解人工智慧驅動工具的最新趨勢、編碼最佳實踐以及安全軟體開發。
馬哈茂德致力於為全球讀者架起新興科技與實務洞見之間的橋樑。聯絡方式:[email protected]。
相關文章
 Github Copilot的基於令牌的計費方式引發了開發者的強烈不滿
微軟GitHub Copilot的黃金時代可能即將結束,尤其是對個人使用者而言。該公司正從統一的訂閱費模式轉向基於代幣的計費方式,這可能會大幅增加使用成本。雖然大型企業或許還能承受這種變化,但小型企業和自由職業者可能會發現新的收費機制讓他們的月預算難以承受。這些變更將於6月1日正式生效,屆時使用者將按照工作中消耗的代幣數量來支付費用,而不再是按每次請求收取固定費用。一些開發者受到這一財務變動的影響,在Reddit和X平臺上表達了他們對這種看似過高的成本增加的擔憂。一位Redditor最近寫道:“
SpaceX的IPO申請檔案重點體現了其在衛星網際網路和人工智慧領域的發展雄心
在為即將進行的IPO提交的S-1註冊檔案中,SpaceX公佈了一系列令人矚目的業務資料,這些資料凸顯了其在航空航天通訊和人工智慧領域的強大實力:Starlink使用者數突破1000萬:截至2026年第一季度,全球付費Starlink使用者數量已達到1030萬,這一數字在過去一年內翻了一番。這一增長充分證明了作為全球最大的近地軌道衛星星座,Starlink在寬頻和行動通訊領域的領先地位。目前該衛星網路由大約9600顆衛星組成,這些衛星佔在軌所有活躍衛星總數的65%。Grok與X人工智慧生態體系:通
阿里巴巴Tuhao M890上市,憑藉三重效能優勢開啟晶片-雲-模型-推理的全棧代理時代
2026年5月20日,在阿里雲峰會上,阿里雲宣佈完成了專為“智慧體時代”設計的全棧技術系統升級。這一變革重塑了整個技術體系——從底層晶片和雲平臺到模型與推理方案。此次升級使阿里雲成為一家能夠讓大量智慧體實現24/7連續執行的“AI工廠”,從而超越了單純為人類使用者提供服務的範疇。1. 核心基礎:騰迅振武M890晶片與超級節點伺服器此次升級的核心是騰迅推出的新一代AI晶片——振武M890,該晶片集訓練與推理功能於一體。效能提升:M890擁有144GB的記憶體,其效能是前代產品振武810E的三倍。
相關專題推薦
動畫創作
Github Copilot的基於令牌的計費方式引發了開發者的強烈不滿
微軟GitHub Copilot的黃金時代可能即將結束,尤其是對個人使用者而言。該公司正從統一的訂閱費模式轉向基於代幣的計費方式,這可能會大幅增加使用成本。雖然大型企業或許還能承受這種變化,但小型企業和自由職業者可能會發現新的收費機制讓他們的月預算難以承受。這些變更將於6月1日正式生效,屆時使用者將按照工作中消耗的代幣數量來支付費用,而不再是按每次請求收取固定費用。一些開發者受到這一財務變動的影響,在Reddit和X平臺上表達了他們對這種看似過高的成本增加的擔憂。一位Redditor最近寫道:“
SpaceX的IPO申請檔案重點體現了其在衛星網際網路和人工智慧領域的發展雄心
在為即將進行的IPO提交的S-1註冊檔案中,SpaceX公佈了一系列令人矚目的業務資料,這些資料凸顯了其在航空航天通訊和人工智慧領域的強大實力:Starlink使用者數突破1000萬:截至2026年第一季度,全球付費Starlink使用者數量已達到1030萬,這一數字在過去一年內翻了一番。這一增長充分證明了作為全球最大的近地軌道衛星星座,Starlink在寬頻和行動通訊領域的領先地位。目前該衛星網路由大約9600顆衛星組成,這些衛星佔在軌所有活躍衛星總數的65%。Grok與X人工智慧生態體系:通
阿里巴巴Tuhao M890上市,憑藉三重效能優勢開啟晶片-雲-模型-推理的全棧代理時代
2026年5月20日,在阿里雲峰會上,阿里雲宣佈完成了專為“智慧體時代”設計的全棧技術系統升級。這一變革重塑了整個技術體系——從底層晶片和雲平臺到模型與推理方案。此次升級使阿里雲成為一家能夠讓大量智慧體實現24/7連續執行的“AI工廠”,從而超越了單純為人類使用者提供服務的範疇。1. 核心基礎:騰迅振武M890晶片與超級節點伺服器此次升級的核心是騰迅推出的新一代AI晶片——振武M890,該晶片集訓練與推理功能於一體。效能提升:M890擁有144GB的記憶體,其效能是前代產品振武810E的三倍。
相關專題推薦
動畫創作
 頂級AI故事板生成工具:能夠自動將電影劇本轉化為動態動畫效果
頂級AI故事板生成工具:能夠自動將電影劇本轉化為動態動畫效果
在XIX.AI上,發現2026年最優秀的人工智慧故事板生成工具。我們精心挑選的這些高評分工具能夠自動將劇本轉化為電影風格的動畫效果,從而節省您的時間並提升前期製作效率。透過實際測試和每週更新的排名資訊,您可以瞭解免費選項與付費選項的差異。今天就找到最適合您的創意助手吧!
 10 個工具
10 個工具
 xix.ai
搜索引擎優化
最佳AI重定向與失效連結查詢工具:自動修復爬取錯誤,節省爬取預算
xix.ai
搜索引擎優化
最佳AI重定向與失效連結查詢工具:自動修復爬取錯誤,節省爬取預算
在XIX.AI上,發現2026年最優秀的人工智慧重定向工具和失效連結查詢工具。我們精心挑選的這些高評分工具能夠自動修復爬取錯誤,從而幫助您節省爬取預算。透過實際測試和每週更新的排名資訊,您可以比較免費選項和付費選項,立即找到最適合您的SEO解決方案!
10 個工具
xix.ai
視頻創作
播客創作者首選的頂尖 AI 影片製作工具:將音訊波形轉化為引人入勝的談話頭像影片
立即前往 XIX.AI,探索 2026 年最適合播客的頂尖 AI 影片製作工具。我們精心挑選並評選出的這份榜單,收錄了多款強大工具,能輕鬆將您的音訊轉化為引人入勝的談話頭像影片。透過實際測試與每週更新的排行榜,比較免費與付費選項的差異。立即解鎖您的視覺敘事優勢。
10 個工具
xix.ai
聊天機器人
利用這些角色扮演工具,打造屬於你的 AI 愛情故事
探索 2026 年最新、評價最高的 AI 角色扮演工具,打造身臨其境的敘事體驗。XIX.AI 精心整理的清單收錄了多款功能強大、能徹底改變遊戲規則的助手,助您釋放創意敘事潛能並增添情感深度。透過實際測試,比較免費與付費選項的差異。立即展開您的獨特旅程。
10 個工具
xix.ai
文字轉語音
獨立遊戲開發者必備的頂尖 AI 配音工具:為 RPG 與視覺小說節省配音時間
探索 2026 年最適合遊戲開發者的 AI 配音工具!XIX.AI 精心整理的清單收錄了備受好評、能徹底改變遊戲開發模式的解決方案,助您在角色扮演遊戲(RPG)和視覺小說(Visual Novel)的配音製作上節省時間與成本。探索免費與付費版本的比較、實際測試結果,以及每週更新的排行榜。立即找到最適合您的配音工具!
10 個工具
xix.ai
教育與學習
最佳人工智慧間隔重複學習工具:幫助醫學生和法律專業學生最佳化學習計劃
探索由 XIX.AI 精心挑選的 2026 年最佳 AI 間隔重複學習工具。我們推薦的這些極具創新性的工具能幫助醫學和法律專業的學生最佳化學習計劃,從而提高知識記憶效果。透過真實案例測試和每週更新的排名資訊,你可以瞭解免費選項與付費選項之間的差異。現在就開啟你的學習優勢吧!
10 個工具
xix.ai

 評論 (0)
0/500
評論 (0)
0/500
無人地面載具(UGV)可借助振動感測器在崎嶇地形中行駛。來源:ckybe, AI,經由 Adobe Stock
幾年前,在一次實地測試中,我們有一輛中型無人地面載具(UGV)試圖攀爬一片看似無害的崎嶇地面。地形並不極端——只是些鬆散的石頭、一點塵土,以及一個緩坡。看起來根本無需擔心。
爬到半山腰時,機器人停了下來。接著其中一個車輪微微下陷,底盤向前傾斜,在任何人來得及介入之前,它便翻倒了。
奇怪的是?攝影機畫面看起來很正常。雷達也未偵測到任何重大危險。根據數據,這條路徑理應是「安全的」。
然而,機器人比我們更早察覺到異狀。只是它無法將這種感覺轉化為實際行動。
這種機器人所「看見」與實際「體感」之間的脫節,正是移動機器人在不平坦地面上維持穩定的核心難題。
在現實世界中,地形往往具有欺騙性。某個表面看似堅實,但在承重時卻可能變得鬆散如粉末;岩石可能隱藏在薄薄的土壤層之下;即使是淺淺的車轍,也可能重新分配載荷,足以將無人地面載具(UGV)推過其傾覆臨界點。而一旦發生傾覆,復原過程往往難以順利。
當今的導航系統仍主要依賴視覺驅動。相機、雷射雷達(LiDAR)和同步定位與映射(SLAM)技術雖能出色地進行地圖建構,卻無法預知地面在行駛通過時的實際反應。這正是系統失效的根源。
振動監測提供了一種不同的解決方案。機器人不再僅依賴外部感知,而是開始傾聽自身狀態。每一次顛簸、微小打滑與衝擊都會產生數據。當你認真對待這些訊號時,它們便能轉化為預測依據。
試想一個人走在鬆散的碎石上。你不會用視覺分析每一步,而是透過感覺。腳下細微的變化會告訴你何時該放慢腳步、調整平衡,或是改變方向。
這正是我們致力於賦予機器人的感知能力。
以下內容並非理論探討,而是基於實務經驗:如何擷取振動數據、這些數據揭示了什麼,以及如何運用它們來確保機器人在地面狀況難以預測時仍能保持穩定。
為何振動訊號對穩定性至關重要
讓我們從工程師常問的一個根本問題開始:振動究竟如何影響穩定性?
簡短的答案是:振動不僅影響穩定性——更揭示了穩定性。
每當車輪與地面接觸時,都會產生一股作用力。這股作用力並非恆定不變,而是會隨著地面是堅硬、鬆軟、不平整或正在移動而產生變化。這些變化會以振動的形式傳遞至機器人全身。
若忽略這些訊號,它們僅是雜訊;若加以分析,它們便成為洞見。
在一次越野測試中,我們駕駛同一台機器人穿越三種地表:緊實的泥土、鬆散的礫石,以及鬆軟的沙地。從視覺上來看,這三種地表似乎都難以駕馭。但它們的振動特徵卻截然不同。
在壓實的泥土上,訊號穩定——振幅低且波形平穩。
在礫石路面,訊號變得混亂,伴隨著尖銳的突波與高頻顫動。
在沙地上,一切都變慢了。訊號變得沉重,幾乎有些遲滯,伴隨著明顯的低頻振盪。這種區別至關重要。
高頻尖峰通常代表撞擊——撞上岩石、碎石或硬質邊緣。這些瞬間可能突然改變載荷分布,並引發不穩定。
低頻振盪雖較為隱晦,但同樣危險。它們往往預示著支撐力的喪失,例如車輪下陷或打滑。你不會感受到突如其來的顫動;相反地,穩定性會逐漸被侵蝕。
關鍵在於:你往往在目睹這些現象之前,便已感受到其影響。
我們在探測車測試中曾遇到這種情況。某段地形看似平坦,是因為埋藏的岩石被薄薄一層沙子覆蓋。攝影機顯示地面平坦,雷射測距儀也偵測到光滑的表面。
但慣性測量單元(IMU)卻揭示了另一種狀況。車輪一碾過隱藏的岩石,振動訊號便立即出現高頻尖峰。這提供了早期預警——在機器人開始失穩之前。
這就是振動感測的威力。它不依賴於能見度,不受光線或塵埃影響,而是真實反映了接觸時的物理狀態。
在嚴苛的環境中,這往往是唯一重要的真相。
振動監測的核心感測器
若說振動是訊號,感測器便是您的耳朵。如同任何感測系統,感測器的安裝位置與品質的重要性,往往超乎多數人的想像。
核心部分,您需要運用三種元件:加速度計、陀螺儀以及慣性測量單元(IMU)。
加速度計承擔了主要工作。它們測量三軸方向的線性加速度,既能捕捉衝擊,也能記錄持續性振動。若車輪撞上岩石,加速度計會立即偵測到;若底盤產生震盪,同樣會被記錄下來。
陀螺儀則提供了另一層次的功能。它們追蹤角運動——即滾轉、俯仰和偏航。這能讓你知道機器人是否開始傾斜,或是以可能導致翻倒的方式旋轉。
將這兩者結合,便構成了一個慣性測量單元(IMU)。大多數現代系統都依賴 IMU,因為它們能提供完整的運動圖像。
但實際經驗表明,感測器的安裝位置與感測器本身同樣重要。
將 IMU 安裝在質量中心是標準做法,且有其道理。這能為整體運動提供穩定的參考基準。然而,若僅此而已,您將錯失關鍵細節。
在崎嶇地形上,大部分的動態變化都發生在車輪處。我們透過在更靠近輪組的位置添加次級加速度計,取得了更佳的結果。這些加速度計能捕捉到局部衝擊,而這些衝擊並不會完全傳遞到底盤中心。
另一個常見的錯誤是「軟性安裝」。這看似微不足道,實則影響重大。若感測器支架即使僅有輕微彎曲,你所測量的就不再是真實的振動——而是經過濾波的版本。這將導致錯誤的結論。
採樣率是另一項實務考量。對多數移動機器人而言,100 至 500 Hz 的範圍已足夠。若過低,會錯失關鍵事件;若過高,則會增加處理負載卻無實質效益。
至於硬體方面,無需採用特殊元件。許多可靠的加速度計感測器既能應對嚴苛環境,又不致超出預算。校準與一致性才是更關鍵的因素。
即時振動處理技術
原始振動數據往往雜亂無章。若您曾直接將IMU的數據繪製成圖,便會明白我的意思——那看起來就像是雜訊。
訣竅不在於將其完全淨化,而在於進行適度處理以揭示其中規律。
第一步是濾波。馬達、變速箱,甚至結構共振都會引入自身的振動。若不處理這些干擾,它們將淹沒地形信號。
我們通常先使用帶通濾波器,以隔離地形交互作用發生的頻率範圍。接著,若存在已知的噪聲源(例如以固定頻率運轉的馬達),我們會套用陷波濾波器來移除它。
我曾見過案例,僅僅一個簡單的陷波濾波器,就能將無法使用的數據轉化為清晰的地形特徵。一旦訊號變得可用,便進入分析階段。
時域分析能顯示訊號的演變過程,但頻域分析才是真正有趣的部分。透過 FFT,您可以精確觀察能量集中於何處。
不同地形會留下獨特的指紋。礫石會將能量分散至高頻段;草地則集中於中頻範圍;沙地則會將所有頻段向低頻偏移並加以衰減。
接著,你便從中提取特徵。不需要數十個——只需幾個有意義的即可。均方根振幅、頻譜功率,或許還有方差。通常這樣就足夠了。
我們曾僅憑這幾個特徵建構出一個簡單的地形分類器,在低速行駛時便達到了近 90% 的準確度。沒有花俏的技術——沒有深度學習。僅憑乾淨的數據與良好的特徵選擇。
關鍵啟示是什麼?你未必總需要複雜的模型。你需要的是優質的訊號。
三軸振動感測器的不同連接方式。來源:ATO
透過振動數據預測穩定性
這正是事情變得有趣之處。多數系統都是在失穩發生後才做出反應。屆時,你已經陷入困境。振動監測讓你能從被動反應轉向主動預測。
傳統上,工程師依賴穩定裕度或力分布模型等指標。這些方法在受控環境下效果良好,但當地形行為發生不可預測的變化時,便難以應對。
振動數據填補了這項缺口。與其純粹透過模型估算力值,不如從實際交互作用中推斷。這使得您的穩定性評估更貼近現實。
近期,基於機器學習的方法在此領域逐漸受到重視。將加速度、角速度和速度數據輸入模型,系統便會輸出一個穩定性評分。
令人驚豔的是,這些模型的泛化能力極佳。
在一項測試中,我們先在草地、碎石和泥土上訓練模型,隨後將其應用於從未接觸過的混合地形。其表現依然出色——雖非完美,但已具實用價值。
實際上,這使得「閘控」等行為成為可能。
我們有一台配備小型機械臂的無人地面載具(UGV)。當振動強度超過閾值時,系統會自動暫停機械臂的動作。僅憑這項機制,就成功避免了數起險些翻覆的事故。
此處的關鍵不在於模型本身,而在於穩定性已從事後檢核轉變為持續監控的對象。
提升平衡能力的控制策略
一旦您信任振動數據,便可開始將其應用於控制。最簡單的方法是速度適應——這也是最有效的方法之一。當振動增加時,減速。僅此而已。
聽起來很基礎,但之所以有效,是因為大多數不穩定問題都與速度成正比。降低速度意味著動態力道減小,讓系統有更多時間做出反應。
除此之外,您還能將振動數據導入控制迴路中。例如,PID 控制器若能獲得反映干擾程度的額外輸入,將能發揮更大效益。這有助於減少振盪並改善響應。
感測器融合同樣發揮著作用。單純的振動數據雖已相當有力,但若結合里程計或視覺回饋,其可靠性將更上一層樓。
我們觀察到的一項實用改進,來自於消除內部雜訊。透過過濾掉內部元件產生的機械振動,控制系統變得明顯更平順——抖動減少,平衡性更佳。
有時,穩定性的提升並非來自增加複雜度,而是來自消除雜訊。
實作挑戰與解決方案
當然,這些並非即插即用。雜訊是最大的挑戰。並非所有振動都有用。有些來自馬達,有些來自結構,有些來自環境。目標是在不丟失重要資訊的前提下,將訊號與雜訊分離。
一款用於機器人與無人機的小型 IMU 感測器。來源:ATO
感測器漂移是另一個問題,尤其是陀螺儀。微小的誤差會隨時間累積。這正是卡爾曼濾波等感測器融合技術變得至關重要的原因。
此外還有變異性問題。只要改變機器人的速度或載重,其振動特徵也會隨之改變。若系統未針對此進行設計,性能便會迅速下降。
唯一的真正解決方案就是測試——不是受控的實驗室測試,而是真實地形、真實環境、真實的邊界案例。這才是系統真正展現實力的時刻。
機器人需要感知地面
若要歸納一個核心要點,那就是:機器人需要「感知」地面,而不僅是「看見」地面。
移動機器人在崎嶇地形上的穩定性,無法僅靠更精準的地圖來解決。這需要機器與環境之間建立更深層的連結。
振動監測正是建立這種連結的關鍵。它能將撞擊、打滑及細微位移轉化為可用的數據,讓機器人得以預判問題,而非僅是被動應對。在一個失誤便可能導致任務終止的環境中,這將產生決定性的差異。
這項技術並非遙不可及。一套穩固的慣性測量單元(IMU)配置、周詳的資料處理,以及實地測試,便能助你走得很遠。接下來,就是不斷迭代。
因為地形總會給你帶來意外。目標是確保你的機器人不會被意外困住太久。
關於作者
Faisal Mahmood 是一位資深數位行銷與科技內容策略專家,在人工智慧、軟體開發及 SEO 導向內容領域擁有豐富經驗。他專精於撰寫經過深度研究、基於事實的文章,協助開發者、企業及技術團隊理解人工智慧驅動工具的最新趨勢、編碼最佳實踐以及安全軟體開發。
馬哈茂德致力於為全球讀者架起新興科技與實務洞見之間的橋樑。聯絡方式:[email protected]。










 Github Copilot的基於令牌的計費方式引發了開發者的強烈不滿
微軟GitHub Copilot的黃金時代可能即將結束,尤其是對個人使用者而言。該公司正從統一的訂閱費模式轉向基於代幣的計費方式,這可能會大幅增加使用成本。雖然大型企業或許還能承受這種變化,但小型企業和自由職業者可能會發現新的收費機制讓他們的月預算難以承受。這些變更將於6月1日正式生效,屆時使用者將按照工作中消耗的代幣數量來支付費用,而不再是按每次請求收取固定費用。一些開發者受到這一財務變動的影響,在Reddit和X平臺上表達了他們對這種看似過高的成本增加的擔憂。一位Redditor最近寫道:“
Github Copilot的基於令牌的計費方式引發了開發者的強烈不滿
微軟GitHub Copilot的黃金時代可能即將結束,尤其是對個人使用者而言。該公司正從統一的訂閱費模式轉向基於代幣的計費方式,這可能會大幅增加使用成本。雖然大型企業或許還能承受這種變化,但小型企業和自由職業者可能會發現新的收費機制讓他們的月預算難以承受。這些變更將於6月1日正式生效,屆時使用者將按照工作中消耗的代幣數量來支付費用,而不再是按每次請求收取固定費用。一些開發者受到這一財務變動的影響,在Reddit和X平臺上表達了他們對這種看似過高的成本增加的擔憂。一位Redditor最近寫道:“
 SpaceX的IPO申請檔案重點體現了其在衛星網際網路和人工智慧領域的發展雄心
在為即將進行的IPO提交的S-1註冊檔案中,SpaceX公佈了一系列令人矚目的業務資料,這些資料凸顯了其在航空航天通訊和人工智慧領域的強大實力:Starlink使用者數突破1000萬:截至2026年第一季度,全球付費Starlink使用者數量已達到1030萬,這一數字在過去一年內翻了一番。這一增長充分證明了作為全球最大的近地軌道衛星星座,Starlink在寬頻和行動通訊領域的領先地位。目前該衛星網路由大約9600顆衛星組成,這些衛星佔在軌所有活躍衛星總數的65%。Grok與X人工智慧生態體系:通
SpaceX的IPO申請檔案重點體現了其在衛星網際網路和人工智慧領域的發展雄心
在為即將進行的IPO提交的S-1註冊檔案中,SpaceX公佈了一系列令人矚目的業務資料,這些資料凸顯了其在航空航天通訊和人工智慧領域的強大實力:Starlink使用者數突破1000萬:截至2026年第一季度,全球付費Starlink使用者數量已達到1030萬,這一數字在過去一年內翻了一番。這一增長充分證明了作為全球最大的近地軌道衛星星座,Starlink在寬頻和行動通訊領域的領先地位。目前該衛星網路由大約9600顆衛星組成,這些衛星佔在軌所有活躍衛星總數的65%。Grok與X人工智慧生態體系:通
 阿里巴巴Tuhao M890上市,憑藉三重效能優勢開啟晶片-雲-模型-推理的全棧代理時代
2026年5月20日,在阿里雲峰會上,阿里雲宣佈完成了專為“智慧體時代”設計的全棧技術系統升級。這一變革重塑了整個技術體系——從底層晶片和雲平臺到模型與推理方案。此次升級使阿里雲成為一家能夠讓大量智慧體實現24/7連續執行的“AI工廠”,從而超越了單純為人類使用者提供服務的範疇。1. 核心基礎:騰迅振武M890晶片與超級節點伺服器此次升級的核心是騰迅推出的新一代AI晶片——振武M890,該晶片集訓練與推理功能於一體。效能提升:M890擁有144GB的記憶體,其效能是前代產品振武810E的三倍。
阿里巴巴Tuhao M890上市,憑藉三重效能優勢開啟晶片-雲-模型-推理的全棧代理時代
2026年5月20日,在阿里雲峰會上,阿里雲宣佈完成了專為“智慧體時代”設計的全棧技術系統升級。這一變革重塑了整個技術體系——從底層晶片和雲平臺到模型與推理方案。此次升級使阿里雲成為一家能夠讓大量智慧體實現24/7連續執行的“AI工廠”,從而超越了單純為人類使用者提供服務的範疇。1. 核心基礎:騰迅振武M890晶片與超級節點伺服器此次升級的核心是騰迅推出的新一代AI晶片——振武M890,該晶片集訓練與推理功能於一體。效能提升:M890擁有144GB的記憶體,其效能是前代產品振武810E的三倍。
在XIX.AI上,發現2026年最優秀的人工智慧故事板生成工具。我們精心挑選的這些高評分工具能夠自動將劇本轉化為電影風格的動畫效果,從而節省您的時間並提升前期製作效率。透過實際測試和每週更新的排名資訊,您可以瞭解免費選項與付費選項的差異。今天就找到最適合您的創意助手吧!
10 個工具
xix.ai
在XIX.AI上,發現2026年最優秀的人工智慧重定向工具和失效連結查詢工具。我們精心挑選的這些高評分工具能夠自動修復爬取錯誤,從而幫助您節省爬取預算。透過實際測試和每週更新的排名資訊,您可以比較免費選項和付費選項,立即找到最適合您的SEO解決方案!
10 個工具
xix.ai

立即前往 XIX.AI,探索 2026 年最適合播客的頂尖 AI 影片製作工具。我們精心挑選並評選出的這份榜單,收錄了多款強大工具,能輕鬆將您的音訊轉化為引人入勝的談話頭像影片。透過實際測試與每週更新的排行榜,比較免費與付費選項的差異。立即解鎖您的視覺敘事優勢。
10 個工具
xix.ai

探索 2026 年最新、評價最高的 AI 角色扮演工具,打造身臨其境的敘事體驗。XIX.AI 精心整理的清單收錄了多款功能強大、能徹底改變遊戲規則的助手,助您釋放創意敘事潛能並增添情感深度。透過實際測試,比較免費與付費選項的差異。立即展開您的獨特旅程。
10 個工具
xix.ai

探索 2026 年最適合遊戲開發者的 AI 配音工具!XIX.AI 精心整理的清單收錄了備受好評、能徹底改變遊戲開發模式的解決方案,助您在角色扮演遊戲(RPG)和視覺小說(Visual Novel)的配音製作上節省時間與成本。探索免費與付費版本的比較、實際測試結果,以及每週更新的排行榜。立即找到最適合您的配音工具!
10 個工具
xix.ai
探索由 XIX.AI 精心挑選的 2026 年最佳 AI 間隔重複學習工具。我們推薦的這些極具創新性的工具能幫助醫學和法律專業的學生最佳化學習計劃,從而提高知識記憶效果。透過真實案例測試和每週更新的排名資訊,你可以瞭解免費選項與付費選項之間的差異。現在就開啟你的學習優勢吧!
10 個工具
xix.ai













