
















 Lar
Lar
O monitoramento de vibrações melhora a estabilidade de robôs móveis em terrenos irregulares

Um UGV consegue se locomover em terrenos acidentados com a ajuda de sensores de vibração. Fonte: ckybe, IA, via Adobe Stock
Há alguns anos, durante um teste de campo, tínhamos um veículo terrestre não tripulado (UGV) de tamanho médio tentando subir uma área de terreno irregular que parecia inofensiva. O terreno não era extremo — apenas algumas pedras soltas, um pouco de poeira e uma inclinação suave. Parecia não haver nada com que se preocupar.
Na metade do caminho, o robô parou. Então, uma roda afundou levemente, o chassi inclinou-se para a frente e, antes que alguém pudesse intervir, ele tombou.
O estranho? A imagem da câmera parecia normal. O lidar também não detectou nenhum perigo grave. De acordo com os dados, o caminho deveria ser “seguro”.
No entanto, o robô percebeu o problema antes de nós. Ele simplesmente não conseguiu transformar essa percepção em ação.
Essa desconexão entre o que um robô vê e o que ele experimenta fisicamente está no cerne da estabilidade dos robôs móveis em terrenos irregulares.
No mundo real, o terreno pode ser enganador. Uma superfície pode parecer sólida, mas tornar-se pulverulenta sob o peso. Pedras podem estar escondidas sob uma fina camada de solo. Até mesmo sulcos rasos podem redistribuir a carga o suficiente para empurrar um UGV além de seu ponto de inclinação. E, uma vez que isso acontece, a recuperação raramente é tranquila.
Os sistemas de navegação atuais ainda são amplamente baseados na visão. Câmeras, lidar e SLAM são excelentes para mapeamento. Mas eles não conseguem dizer como o solo reagirá quando o robô passar por cima. É aí que ocorrem as falhas.
O monitoramento de vibração oferece uma abordagem diferente. Em vez de depender exclusivamente da percepção externa, o robô começa a ouvir seu próprio corpo. Cada solavanco, microdeslizamento e impacto gera dados. Quando você leva esses sinais a sério, eles se tornam preditivos.
Pense nisso como uma pessoa caminhando sobre cascalho solto. Você não analisa visualmente cada passo. Você sente. Mudanças sutis sob seus pés indicam quando desacelerar, ajustar o equilíbrio ou mudar de direção.
É esse tipo de consciência que pretendemos dar aos robôs.
O que se segue não é uma discussão teórica. Baseia-se no que funciona na prática: como capturar dados de vibração, o que eles revelam e como usá-los para manter seu robô estável quando o solo se torna imprevisível.
Por que os sinais de vibração são cruciais para a estabilidade
Vamos começar com uma pergunta fundamental que os engenheiros costumam fazer: como as vibrações realmente influenciam a estabilidade?
A resposta curta: elas não apenas influenciam a estabilidade — elas a revelam.
Sempre que uma roda interage com o solo, ela gera uma força. Essa força não é constante. Ela muda dependendo se a superfície é dura, macia, irregular ou instável. Essas variações se propagam pelo robô na forma de vibrações.
Se você as ignorar, elas são apenas ruído. Se você as analisar, elas se transformam em insights.
Em um teste off-road, conduzimos o mesmo robô por três superfícies: terra compacta, cascalho solto e areia fofa. Visualmente, todas as três pareciam manejáveis. Mas seus perfis de vibração eram completamente distintos.
Na terra compacta, o sinal era estável — de baixa amplitude e consistente.
No cascalho, ele ficou caótico, com picos acentuados e ruídos de alta frequência.
Na areia, tudo desacelerou. O sinal ficou mais pesado, quase lento, com oscilações perceptíveis de baixa frequência. Essa distinção é crítica.
Picos de alta frequência geralmente indicam impactos — colisões com rochas, detritos ou bordas duras. Esses momentos podem alterar repentinamente a distribuição de carga e provocar instabilidade.
As oscilações de baixa frequência são mais sutis, mas igualmente perigosas. Elas frequentemente sinalizam uma perda de apoio, como uma roda afundando ou escorregando. Você não sente um solavanco repentino; em vez disso, a estabilidade se deteriora gradualmente.
Aqui está o ponto-chave: muitas vezes você sente esses efeitos antes de vê-los.
Encontramos isso durante os testes do rover. Uma seção do terreno parecia lisa porque uma fina camada de areia cobria rochas enterradas. As câmeras mostravam um terreno plano. O Lidar detectou uma superfície limpa.
Mas a IMU contava uma história diferente. Assim que as rodas passaram sobre as rochas ocultas, o sinal de vibração acendeu com picos de alta frequência. Isso forneceu um aviso antecipado — antes que o robô começasse a se desestabilizar.
Esse é o poder da detecção de vibração. Ela não depende da visibilidade. Não é afetada pela iluminação ou pela poeira. Ela reflete a física real do contato.
Em ambientes desafiadores, essa é frequentemente a única verdade que importa.
Sensores essenciais para monitoramento de vibração
Se a vibração é o sinal, os sensores são seus ouvidos. E, como em qualquer sistema de detecção, o posicionamento e a qualidade importam mais do que muitos imaginam.
No núcleo, você trabalha com três componentes: acelerômetros, giroscópios e unidades de medição inercial (IMUs).
Os acelerômetros fazem o trabalho pesado. Eles medem a aceleração linear ao longo de três eixos, captando tanto choques quanto vibração contínua. Se uma roda bater em uma pedra, o acelerômetro detecta isso instantaneamente. Se o chassi oscilar, isso também aparece.
Os giroscópios acrescentam outra camada. Eles rastreiam o movimento angular — rotação, inclinação e guinada. Isso indica se o robô está começando a inclinar-se ou girar de uma forma que possa levar ao tombamento.
Combine os dois e você terá uma IMU. A maioria dos sistemas modernos depende de IMUs porque elas fornecem uma visão completa do movimento.
Mas a experiência no mundo real mostra que o posicionamento dos sensores é tão importante quanto os próprios sensores.
Montar uma IMU no centro de massa é prática padrão, e por um bom motivo. Ela fornece uma referência estável para o movimento geral. No entanto, se você usar apenas isso, perderá detalhes cruciais.
Em terrenos acidentados, a maior parte da ação ocorre nas rodas. Alcançamos melhores resultados adicionando acelerômetros secundários mais próximos dos conjuntos de rodas. Estes captam impactos localizados que não se propagam totalmente até o centro do chassi.
Outro erro comum é a montagem flexível. Pode parecer insignificante, mas é significativo. Se a montagem do sensor flexionar mesmo que ligeiramente, você não estará mais medindo a vibração real — estará medindo uma versão filtrada. Isso leva a conclusões incorretas.
A taxa de amostragem é outra consideração prática. Para a maioria dos robôs móveis, uma faixa de 100 a 500 Hz é suficiente. Se for muito baixa, você perde eventos críticos. Se for muito alta, você adiciona sobrecarga de processamento sem benefício significativo.
Quanto ao hardware, você não precisa de componentes sofisticados. Muitos sensores acelerômetros confiáveis suportam ambientes adversos sem estourar o orçamento. Calibração e consistência são muito mais importantes.
Técnicas de processamento de vibração em tempo real
Os dados brutos de vibração são confusos. Se você já os plotou diretamente de uma IMU, sabe do que estou falando — eles parecem ruído.
O segredo não é limpá-los completamente, mas limpá-los apenas o suficiente para revelar padrões.
O primeiro passo é a filtragem. Motores, caixas de engrenagens e até mesmo a ressonância estrutural introduzem suas próprias vibrações. Se você não lidar com elas, elas abafarão os sinais do terreno.
Normalmente começamos com um filtro passa-banda para isolar a faixa de frequência onde ocorre a interação com o terreno. Em seguida, se houver uma fonte de ruído conhecida, como um motor girando a uma frequência fixa, aplicamos um filtro notch para removê-la.
Já vi casos em que um simples filtro notch transformou dados inutilizáveis em assinaturas claras do terreno. Assim que o sinal estiver utilizável, você passa para a análise.
A análise no domínio do tempo mostra como o sinal evolui. Mas é na análise no domínio da frequência que as coisas ficam interessantes. Usando a FFT, você pode ver exatamente onde a energia está concentrada.
Terrenos diferentes deixam marcas distintas. O cascalho espalha a energia pelas altas frequências. A grama fica na faixa média. A areia desvia tudo para frequências mais baixas e amortece o sinal.
A partir daí, você extrai características. Não dezenas — apenas algumas significativas. Amplitude RMS, potência espectral e talvez variância. Isso geralmente é suficiente.
Certa vez, criamos um classificador de terreno simples usando apenas algumas dessas características e alcançamos quase 90% de precisão em baixas velocidades. Nada sofisticado — sem aprendizado profundo. Apenas dados limpos e uma boa seleção de características.
A lição principal? Nem sempre você precisa de modelos complexos. Você precisa de bons sinais.
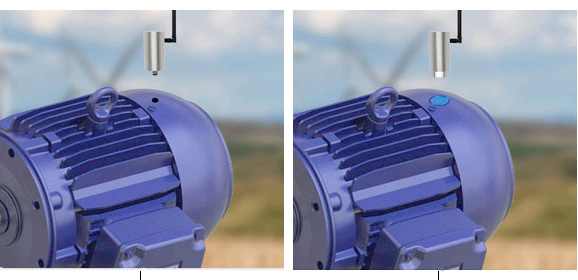
Diferentes métodos de conexão de um sensor de vibração de três eixos. Fonte: ATO
Previsão de estabilidade a partir de dados de vibração
É aqui que as coisas ficam interessantes. A maioria dos sistemas reage à instabilidade depois que ela começa. Nessa altura, você já está em apuros. O monitoramento de vibração permite que você passe da reação para a previsão.
Tradicionalmente, os engenheiros dependem de métricas como margem de estabilidade ou modelos de distribuição de força. Essas métricas funcionam bem em ambientes controlados, mas enfrentam dificuldades quando o comportamento do terreno muda de forma imprevisível.
Os dados de vibração preenchem essa lacuna. Em vez de estimar forças apenas a partir de modelos, você as infere a partir da interação real. Isso torna sua avaliação de estabilidade mais fundamentada na realidade.
Recentemente, abordagens baseadas em aprendizado ganharam força nessa área. Insira dados de aceleração, velocidade angular e velocidade em um modelo, e ele gera uma pontuação de estabilidade.
O que impressiona é o quão bem esses modelos generalizam.
Em um teste, treinamos um modelo em grama, cascalho e terra. Em seguida, o executamos em um terreno misto que ele nunca havia visto. Ele ainda teve um bom desempenho — não perfeito, mas útil.
Na prática, isso permite comportamentos como o gating.
Tínhamos um UGV com um pequeno braço manipulador. Quando os níveis de vibração ultrapassavam um limite, o sistema pausava automaticamente o movimento do braço. Isso por si só evitou vários incidentes em que o veículo quase tombou.
A ideia importante aqui não é o modelo em si. É que a estabilidade se torna algo que você monitora continuamente, não algo que você verifica após o fato.
Estratégias de controle para equilíbrio aprimorado
Depois de confiar nos seus dados de vibração, você pode começar a usá-los no controle. A abordagem mais simples é a adaptação de velocidade — e é uma das mais eficazes. Quando a vibração aumenta, diminua a velocidade. É isso.
Parece básico, mas funciona porque a maioria dos problemas de instabilidade varia proporcionalmente à velocidade. Menor velocidade significa forças dinâmicas menores, dando ao seu sistema mais tempo para reagir.
Além disso, você pode alimentar os dados de vibração em seus loops de controle. Controladores PID, por exemplo, podem se beneficiar de uma entrada adicional que reflita os níveis de perturbação. Isso ajuda a reduzir oscilações e melhora a resposta.
A fusão de sensores também desempenha um papel importante. Os dados de vibração por si só são poderosos, mas combiná-los com odometria ou feedback visual os torna ainda mais confiáveis.
Uma melhoria prática que observamos veio da eliminação do ruído interno. Ao filtrar as vibrações mecânicas dos componentes internos, o sistema de controle ficou visivelmente mais suave — menos oscilações, melhor equilíbrio.
Às vezes, as melhorias na estabilidade não vêm da adição de complexidade. Elas vêm da remoção do ruído.
Desafios de implementação e correções
É claro que nada disso é plug-and-play. O ruído é o maior desafio. Nem todas as vibrações são úteis. Algumas vêm dos motores, outras da estrutura, outras do ambiente. O objetivo é separar o sinal do ruído sem perder informações importantes.

Um pequeno sensor IMU para robôs e drones. Fonte: ATO
O desvio do sensor é outra questão, especialmente com giroscópios. Pequenos erros se acumulam com o tempo. É aí que técnicas de fusão de sensores, como a filtragem de Kalman, se tornam essenciais.
Depois, há a variabilidade. Mude a velocidade ou a carga útil do robô, e seu perfil de vibração também muda. Se seu sistema não for projetado para lidar com isso, o desempenho cai rapidamente.
A única solução real é o teste — não testes controlados em laboratório, mas terreno real, condições reais, casos extremos reais. É aí que os sistemas provam seu valor.
Os robôs precisam sentir o solo
Se há uma lição a ser aprendida, é esta: os robôs precisam sentir o solo, não apenas vê-lo.
A estabilidade de robôs móveis em terrenos irregulares não será resolvida apenas com mapas melhores. Ela requer uma conexão mais profunda entre a máquina e seu ambiente.
O monitoramento de vibração proporciona essa conexão. Ele transforma impactos, deslizamentos e mudanças sutis em dados úteis. Permite que os robôs antecipem problemas em vez de simplesmente reagir a eles. Em ambientes onde um único erro pode encerrar uma missão, isso faz toda a diferença.
A tecnologia não está fora de alcance. Uma configuração sólida de IMU, processamento bem pensado e testes de campo podem levar você muito longe. A partir daí, é uma questão de iteração.
Porque o terreno sempre vai te surpreender. O objetivo é garantir que seu robô não fique surpreso por muito tempo.
 Sobre o autor
Sobre o autor
Faisal Mahmood é um experiente estrategista de marketing digital e conteúdo de tecnologia com ampla experiência em IA, desenvolvimento de software e conteúdo orientado para SEO. Ele é especialista na criação de artigos profundamente pesquisados e baseados em fatos que ajudam desenvolvedores, empresas e equipes de tecnologia a compreender as últimas tendências em ferramentas impulsionadas por IA, melhores práticas de codificação e desenvolvimento seguro de software.
Mahmood é apaixonado por preencher a lacuna entre tecnologias emergentes e insights práticos para públicos globais. Ele pode ser contatado pelo e-mail [email protected].
Artigo relacionado
 Pontos destacados do documento de oferta pública inicial da SpaceX: ambições de expansão na área de internet por satélite e inteligência artificial
Em seu documento de registro S-1 apresentado antes do planejado IPO, a SpaceX revelou vários indicadores empresariais impressionantes que destacam sua forte presença no campo das comunicações aeroespaciais e da inteligência artificial:Mais de 10 mil
Alibaba Tuhao M890 estreia com desempenho triplamente superior, marcando o início de uma nova era de agentes full-stack para modelos de inferência em nuvem e chip.
Em 20 de maio de 2026, no Alibaba Cloud Summit, a empresa anunciou a conclusão de uma atualização do sistema tecnológico full-stack projetada para a era dos agentes inteligentes. Essa transformação redefiniu todo o processo, desde os chips e a plataf
Pentium 4 Revival: Uma CPU com 20 Anos de História Executa o Modelo Grande Meta Llama 3
Recentemente, o canal técnico do YouTube Fully Buffered realizou um experimento impressionante e rigoroso: conseguiu executar com sucesso o mais recente modelo grande da Meta, Llama 3.2 3B, em um processador Pentium 4 641, um chip lançado em 2006.Es
Recomendações de tópicos especiais relacionados
Criação de vídeo
Pontos destacados do documento de oferta pública inicial da SpaceX: ambições de expansão na área de internet por satélite e inteligência artificial
Em seu documento de registro S-1 apresentado antes do planejado IPO, a SpaceX revelou vários indicadores empresariais impressionantes que destacam sua forte presença no campo das comunicações aeroespaciais e da inteligência artificial:Mais de 10 mil
Alibaba Tuhao M890 estreia com desempenho triplamente superior, marcando o início de uma nova era de agentes full-stack para modelos de inferência em nuvem e chip.
Em 20 de maio de 2026, no Alibaba Cloud Summit, a empresa anunciou a conclusão de uma atualização do sistema tecnológico full-stack projetada para a era dos agentes inteligentes. Essa transformação redefiniu todo o processo, desde os chips e a plataf
Pentium 4 Revival: Uma CPU com 20 Anos de História Executa o Modelo Grande Meta Llama 3
Recentemente, o canal técnico do YouTube Fully Buffered realizou um experimento impressionante e rigoroso: conseguiu executar com sucesso o mais recente modelo grande da Meta, Llama 3.2 3B, em um processador Pentium 4 641, um chip lançado em 2006.Es
Recomendações de tópicos especiais relacionados
Criação de vídeo
 Os melhores criadores de vídeo com IA para podcasters: transforme arquivos de áudio em vídeos envolventes com apresentador
Os melhores criadores de vídeo com IA para podcasters: transforme arquivos de áudio em vídeos envolventes com apresentador
Descubra os melhores criadores de vídeo com IA para podcasters de 2026 no XIX.AI. Nossa lista selecionada e com as melhores avaliações apresenta ferramentas poderosas que transformam seu áudio em vídeos envolventes com a sua imagem em primeiro plano, sem esforço. Compare opções gratuitas e pagas com testes práticos e rankings atualizados semanalmente. Destaque-se agora na narrativa visual.
 10 ferramentas
10 ferramentas
 xix.ai
chatbot
Crie sua própria história de amor com IA usando estas ferramentas de roleplay
xix.ai
chatbot
Crie sua própria história de amor com IA usando estas ferramentas de roleplay
Descubra as melhores ferramentas de roleplay com IA de 2026 para criar narrativas imersivas. A lista selecionada pela XIX.AI apresenta assistentes poderosos e revolucionários, capazes de estimular a narrativa criativa e a profundidade emocional. Compare as opções gratuitas com as pagas por meio de testes práticos. Comece hoje mesmo sua jornada única.
10 ferramentas
xix.ai
Conversão de texto para fala
As melhores ferramentas de voz com IA para desenvolvedores de jogos independentes: economize tempo na dublagem de RPGs e romances visuais
Descubra as melhores ferramentas de voz com IA de 2026 para desenvolvedores de jogos! A lista selecionada pela XIX.AI apresenta soluções de ponta e revolucionárias para economizar seu tempo e dinheiro na dublagem de RPGs e romances visuais. Explore comparações entre opções gratuitas e pagas, testes práticos e rankings atualizados semanalmente. Encontre hoje a ferramenta de voz perfeita para você!
10 ferramentas
xix.ai
Educação e Aprendizagem
Melhores ferramentas de repetição espaçada com IA: otimize seus horários de estudo para estudantes de medicina e direito
Descubra os melhores ferramentas de repetição espaçada em AI de 2026, selecionadas por XIX.AI. Nossas escolhas mais recomendadas e revolucionárias ajudam estudantes de medicina e direito a otimizar seus horários de estudo para uma melhor retenção do conhecimento. Compare opções gratuitas e pagas com testes reais e rankings atualizados semanalmente. Desfrute agora de uma vantagem competitiva no aprendizado.
10 ferramentas
xix.ai
Criação de vídeo
As melhores plataformas de IA para conversão de texto em vídeo para redação de roteiros e narrativa visual
As melhores plataformas de IA para conversão de texto em vídeo de 2026: as ferramentas mais bem avaliadas para redação de roteiros e narrativa visual. Descubra soluções poderosas e revolucionárias para transformar seu texto em vídeos envolventes. Compare opções gratuitas e pagas com nossos rankings atualizados semanalmente e testes práticos. Encontre a plataforma perfeita para impulsionar sua criatividade e produtividade. Explore a seleção especial no XIX.AI.
10 ferramentas
xix.ai
chatbot
Orquestradores de Múltiplos Agentes IA: Projeto de Fluxos de Trabalho Automatizados Complexos através do Linguagem Natural
2026 Mais recente: Descubra os melhores orquestradores multi-agente de IA para projetar fluxos de trabalho automatizados complexos através do uso da linguagem natural. Nossa lista selecionada apresenta plataformas poderosas e altamente avaliadas para uma automação de tarefas sem falhas e um gerenciamento inteligente de processos. Compare opções gratuitas e pagas com informações reais do mundo real. Desfrute de uma vantagem competitiva com as classificações atualizadas semanalmente por especialistas da XIX.AI.
10 ferramentas
xix.ai

 Comentários (0)
Comentários (0)
Um UGV consegue se locomover em terrenos acidentados com a ajuda de sensores de vibração. Fonte: ckybe, IA, via Adobe Stock
Há alguns anos, durante um teste de campo, tínhamos um veículo terrestre não tripulado (UGV) de tamanho médio tentando subir uma área de terreno irregular que parecia inofensiva. O terreno não era extremo — apenas algumas pedras soltas, um pouco de poeira e uma inclinação suave. Parecia não haver nada com que se preocupar.
Na metade do caminho, o robô parou. Então, uma roda afundou levemente, o chassi inclinou-se para a frente e, antes que alguém pudesse intervir, ele tombou.
O estranho? A imagem da câmera parecia normal. O lidar também não detectou nenhum perigo grave. De acordo com os dados, o caminho deveria ser “seguro”.
No entanto, o robô percebeu o problema antes de nós. Ele simplesmente não conseguiu transformar essa percepção em ação.
Essa desconexão entre o que um robô vê e o que ele experimenta fisicamente está no cerne da estabilidade dos robôs móveis em terrenos irregulares.
No mundo real, o terreno pode ser enganador. Uma superfície pode parecer sólida, mas tornar-se pulverulenta sob o peso. Pedras podem estar escondidas sob uma fina camada de solo. Até mesmo sulcos rasos podem redistribuir a carga o suficiente para empurrar um UGV além de seu ponto de inclinação. E, uma vez que isso acontece, a recuperação raramente é tranquila.
Os sistemas de navegação atuais ainda são amplamente baseados na visão. Câmeras, lidar e SLAM são excelentes para mapeamento. Mas eles não conseguem dizer como o solo reagirá quando o robô passar por cima. É aí que ocorrem as falhas.
O monitoramento de vibração oferece uma abordagem diferente. Em vez de depender exclusivamente da percepção externa, o robô começa a ouvir seu próprio corpo. Cada solavanco, microdeslizamento e impacto gera dados. Quando você leva esses sinais a sério, eles se tornam preditivos.
Pense nisso como uma pessoa caminhando sobre cascalho solto. Você não analisa visualmente cada passo. Você sente. Mudanças sutis sob seus pés indicam quando desacelerar, ajustar o equilíbrio ou mudar de direção.
É esse tipo de consciência que pretendemos dar aos robôs.
O que se segue não é uma discussão teórica. Baseia-se no que funciona na prática: como capturar dados de vibração, o que eles revelam e como usá-los para manter seu robô estável quando o solo se torna imprevisível.
Por que os sinais de vibração são cruciais para a estabilidade
Vamos começar com uma pergunta fundamental que os engenheiros costumam fazer: como as vibrações realmente influenciam a estabilidade?
A resposta curta: elas não apenas influenciam a estabilidade — elas a revelam.
Sempre que uma roda interage com o solo, ela gera uma força. Essa força não é constante. Ela muda dependendo se a superfície é dura, macia, irregular ou instável. Essas variações se propagam pelo robô na forma de vibrações.
Se você as ignorar, elas são apenas ruído. Se você as analisar, elas se transformam em insights.
Em um teste off-road, conduzimos o mesmo robô por três superfícies: terra compacta, cascalho solto e areia fofa. Visualmente, todas as três pareciam manejáveis. Mas seus perfis de vibração eram completamente distintos.
Na terra compacta, o sinal era estável — de baixa amplitude e consistente.
No cascalho, ele ficou caótico, com picos acentuados e ruídos de alta frequência.
Na areia, tudo desacelerou. O sinal ficou mais pesado, quase lento, com oscilações perceptíveis de baixa frequência. Essa distinção é crítica.
Picos de alta frequência geralmente indicam impactos — colisões com rochas, detritos ou bordas duras. Esses momentos podem alterar repentinamente a distribuição de carga e provocar instabilidade.
As oscilações de baixa frequência são mais sutis, mas igualmente perigosas. Elas frequentemente sinalizam uma perda de apoio, como uma roda afundando ou escorregando. Você não sente um solavanco repentino; em vez disso, a estabilidade se deteriora gradualmente.
Aqui está o ponto-chave: muitas vezes você sente esses efeitos antes de vê-los.
Encontramos isso durante os testes do rover. Uma seção do terreno parecia lisa porque uma fina camada de areia cobria rochas enterradas. As câmeras mostravam um terreno plano. O Lidar detectou uma superfície limpa.
Mas a IMU contava uma história diferente. Assim que as rodas passaram sobre as rochas ocultas, o sinal de vibração acendeu com picos de alta frequência. Isso forneceu um aviso antecipado — antes que o robô começasse a se desestabilizar.
Esse é o poder da detecção de vibração. Ela não depende da visibilidade. Não é afetada pela iluminação ou pela poeira. Ela reflete a física real do contato.
Em ambientes desafiadores, essa é frequentemente a única verdade que importa.
Sensores essenciais para monitoramento de vibração
Se a vibração é o sinal, os sensores são seus ouvidos. E, como em qualquer sistema de detecção, o posicionamento e a qualidade importam mais do que muitos imaginam.
No núcleo, você trabalha com três componentes: acelerômetros, giroscópios e unidades de medição inercial (IMUs).
Os acelerômetros fazem o trabalho pesado. Eles medem a aceleração linear ao longo de três eixos, captando tanto choques quanto vibração contínua. Se uma roda bater em uma pedra, o acelerômetro detecta isso instantaneamente. Se o chassi oscilar, isso também aparece.
Os giroscópios acrescentam outra camada. Eles rastreiam o movimento angular — rotação, inclinação e guinada. Isso indica se o robô está começando a inclinar-se ou girar de uma forma que possa levar ao tombamento.
Combine os dois e você terá uma IMU. A maioria dos sistemas modernos depende de IMUs porque elas fornecem uma visão completa do movimento.
Mas a experiência no mundo real mostra que o posicionamento dos sensores é tão importante quanto os próprios sensores.
Montar uma IMU no centro de massa é prática padrão, e por um bom motivo. Ela fornece uma referência estável para o movimento geral. No entanto, se você usar apenas isso, perderá detalhes cruciais.
Em terrenos acidentados, a maior parte da ação ocorre nas rodas. Alcançamos melhores resultados adicionando acelerômetros secundários mais próximos dos conjuntos de rodas. Estes captam impactos localizados que não se propagam totalmente até o centro do chassi.
Outro erro comum é a montagem flexível. Pode parecer insignificante, mas é significativo. Se a montagem do sensor flexionar mesmo que ligeiramente, você não estará mais medindo a vibração real — estará medindo uma versão filtrada. Isso leva a conclusões incorretas.
A taxa de amostragem é outra consideração prática. Para a maioria dos robôs móveis, uma faixa de 100 a 500 Hz é suficiente. Se for muito baixa, você perde eventos críticos. Se for muito alta, você adiciona sobrecarga de processamento sem benefício significativo.
Quanto ao hardware, você não precisa de componentes sofisticados. Muitos sensores acelerômetros confiáveis suportam ambientes adversos sem estourar o orçamento. Calibração e consistência são muito mais importantes.
Técnicas de processamento de vibração em tempo real
Os dados brutos de vibração são confusos. Se você já os plotou diretamente de uma IMU, sabe do que estou falando — eles parecem ruído.
O segredo não é limpá-los completamente, mas limpá-los apenas o suficiente para revelar padrões.
O primeiro passo é a filtragem. Motores, caixas de engrenagens e até mesmo a ressonância estrutural introduzem suas próprias vibrações. Se você não lidar com elas, elas abafarão os sinais do terreno.
Normalmente começamos com um filtro passa-banda para isolar a faixa de frequência onde ocorre a interação com o terreno. Em seguida, se houver uma fonte de ruído conhecida, como um motor girando a uma frequência fixa, aplicamos um filtro notch para removê-la.
Já vi casos em que um simples filtro notch transformou dados inutilizáveis em assinaturas claras do terreno. Assim que o sinal estiver utilizável, você passa para a análise.
A análise no domínio do tempo mostra como o sinal evolui. Mas é na análise no domínio da frequência que as coisas ficam interessantes. Usando a FFT, você pode ver exatamente onde a energia está concentrada.
Terrenos diferentes deixam marcas distintas. O cascalho espalha a energia pelas altas frequências. A grama fica na faixa média. A areia desvia tudo para frequências mais baixas e amortece o sinal.
A partir daí, você extrai características. Não dezenas — apenas algumas significativas. Amplitude RMS, potência espectral e talvez variância. Isso geralmente é suficiente.
Certa vez, criamos um classificador de terreno simples usando apenas algumas dessas características e alcançamos quase 90% de precisão em baixas velocidades. Nada sofisticado — sem aprendizado profundo. Apenas dados limpos e uma boa seleção de características.
A lição principal? Nem sempre você precisa de modelos complexos. Você precisa de bons sinais.
Diferentes métodos de conexão de um sensor de vibração de três eixos. Fonte: ATO
Previsão de estabilidade a partir de dados de vibração
É aqui que as coisas ficam interessantes. A maioria dos sistemas reage à instabilidade depois que ela começa. Nessa altura, você já está em apuros. O monitoramento de vibração permite que você passe da reação para a previsão.
Tradicionalmente, os engenheiros dependem de métricas como margem de estabilidade ou modelos de distribuição de força. Essas métricas funcionam bem em ambientes controlados, mas enfrentam dificuldades quando o comportamento do terreno muda de forma imprevisível.
Os dados de vibração preenchem essa lacuna. Em vez de estimar forças apenas a partir de modelos, você as infere a partir da interação real. Isso torna sua avaliação de estabilidade mais fundamentada na realidade.
Recentemente, abordagens baseadas em aprendizado ganharam força nessa área. Insira dados de aceleração, velocidade angular e velocidade em um modelo, e ele gera uma pontuação de estabilidade.
O que impressiona é o quão bem esses modelos generalizam.
Em um teste, treinamos um modelo em grama, cascalho e terra. Em seguida, o executamos em um terreno misto que ele nunca havia visto. Ele ainda teve um bom desempenho — não perfeito, mas útil.
Na prática, isso permite comportamentos como o gating.
Tínhamos um UGV com um pequeno braço manipulador. Quando os níveis de vibração ultrapassavam um limite, o sistema pausava automaticamente o movimento do braço. Isso por si só evitou vários incidentes em que o veículo quase tombou.
A ideia importante aqui não é o modelo em si. É que a estabilidade se torna algo que você monitora continuamente, não algo que você verifica após o fato.
Estratégias de controle para equilíbrio aprimorado
Depois de confiar nos seus dados de vibração, você pode começar a usá-los no controle. A abordagem mais simples é a adaptação de velocidade — e é uma das mais eficazes. Quando a vibração aumenta, diminua a velocidade. É isso.
Parece básico, mas funciona porque a maioria dos problemas de instabilidade varia proporcionalmente à velocidade. Menor velocidade significa forças dinâmicas menores, dando ao seu sistema mais tempo para reagir.
Além disso, você pode alimentar os dados de vibração em seus loops de controle. Controladores PID, por exemplo, podem se beneficiar de uma entrada adicional que reflita os níveis de perturbação. Isso ajuda a reduzir oscilações e melhora a resposta.
A fusão de sensores também desempenha um papel importante. Os dados de vibração por si só são poderosos, mas combiná-los com odometria ou feedback visual os torna ainda mais confiáveis.
Uma melhoria prática que observamos veio da eliminação do ruído interno. Ao filtrar as vibrações mecânicas dos componentes internos, o sistema de controle ficou visivelmente mais suave — menos oscilações, melhor equilíbrio.
Às vezes, as melhorias na estabilidade não vêm da adição de complexidade. Elas vêm da remoção do ruído.
Desafios de implementação e correções
É claro que nada disso é plug-and-play. O ruído é o maior desafio. Nem todas as vibrações são úteis. Algumas vêm dos motores, outras da estrutura, outras do ambiente. O objetivo é separar o sinal do ruído sem perder informações importantes.
Um pequeno sensor IMU para robôs e drones. Fonte: ATO
O desvio do sensor é outra questão, especialmente com giroscópios. Pequenos erros se acumulam com o tempo. É aí que técnicas de fusão de sensores, como a filtragem de Kalman, se tornam essenciais.
Depois, há a variabilidade. Mude a velocidade ou a carga útil do robô, e seu perfil de vibração também muda. Se seu sistema não for projetado para lidar com isso, o desempenho cai rapidamente.
A única solução real é o teste — não testes controlados em laboratório, mas terreno real, condições reais, casos extremos reais. É aí que os sistemas provam seu valor.
Os robôs precisam sentir o solo
Se há uma lição a ser aprendida, é esta: os robôs precisam sentir o solo, não apenas vê-lo.
A estabilidade de robôs móveis em terrenos irregulares não será resolvida apenas com mapas melhores. Ela requer uma conexão mais profunda entre a máquina e seu ambiente.
O monitoramento de vibração proporciona essa conexão. Ele transforma impactos, deslizamentos e mudanças sutis em dados úteis. Permite que os robôs antecipem problemas em vez de simplesmente reagir a eles. Em ambientes onde um único erro pode encerrar uma missão, isso faz toda a diferença.
A tecnologia não está fora de alcance. Uma configuração sólida de IMU, processamento bem pensado e testes de campo podem levar você muito longe. A partir daí, é uma questão de iteração.
Porque o terreno sempre vai te surpreender. O objetivo é garantir que seu robô não fique surpreso por muito tempo.
Sobre o autor
Faisal Mahmood é um experiente estrategista de marketing digital e conteúdo de tecnologia com ampla experiência em IA, desenvolvimento de software e conteúdo orientado para SEO. Ele é especialista na criação de artigos profundamente pesquisados e baseados em fatos que ajudam desenvolvedores, empresas e equipes de tecnologia a compreender as últimas tendências em ferramentas impulsionadas por IA, melhores práticas de codificação e desenvolvimento seguro de software.
Mahmood é apaixonado por preencher a lacuna entre tecnologias emergentes e insights práticos para públicos globais. Ele pode ser contatado pelo e-mail [email protected].










 Pontos destacados do documento de oferta pública inicial da SpaceX: ambições de expansão na área de internet por satélite e inteligência artificial
Em seu documento de registro S-1 apresentado antes do planejado IPO, a SpaceX revelou vários indicadores empresariais impressionantes que destacam sua forte presença no campo das comunicações aeroespaciais e da inteligência artificial:Mais de 10 mil
Pontos destacados do documento de oferta pública inicial da SpaceX: ambições de expansão na área de internet por satélite e inteligência artificial
Em seu documento de registro S-1 apresentado antes do planejado IPO, a SpaceX revelou vários indicadores empresariais impressionantes que destacam sua forte presença no campo das comunicações aeroespaciais e da inteligência artificial:Mais de 10 mil
 Alibaba Tuhao M890 estreia com desempenho triplamente superior, marcando o início de uma nova era de agentes full-stack para modelos de inferência em nuvem e chip.
Em 20 de maio de 2026, no Alibaba Cloud Summit, a empresa anunciou a conclusão de uma atualização do sistema tecnológico full-stack projetada para a era dos agentes inteligentes. Essa transformação redefiniu todo o processo, desde os chips e a plataf
Alibaba Tuhao M890 estreia com desempenho triplamente superior, marcando o início de uma nova era de agentes full-stack para modelos de inferência em nuvem e chip.
Em 20 de maio de 2026, no Alibaba Cloud Summit, a empresa anunciou a conclusão de uma atualização do sistema tecnológico full-stack projetada para a era dos agentes inteligentes. Essa transformação redefiniu todo o processo, desde os chips e a plataf
 Pentium 4 Revival: Uma CPU com 20 Anos de História Executa o Modelo Grande Meta Llama 3
Recentemente, o canal técnico do YouTube Fully Buffered realizou um experimento impressionante e rigoroso: conseguiu executar com sucesso o mais recente modelo grande da Meta, Llama 3.2 3B, em um processador Pentium 4 641, um chip lançado em 2006.Es
Pentium 4 Revival: Uma CPU com 20 Anos de História Executa o Modelo Grande Meta Llama 3
Recentemente, o canal técnico do YouTube Fully Buffered realizou um experimento impressionante e rigoroso: conseguiu executar com sucesso o mais recente modelo grande da Meta, Llama 3.2 3B, em um processador Pentium 4 641, um chip lançado em 2006.Es

Descubra os melhores criadores de vídeo com IA para podcasters de 2026 no XIX.AI. Nossa lista selecionada e com as melhores avaliações apresenta ferramentas poderosas que transformam seu áudio em vídeos envolventes com a sua imagem em primeiro plano, sem esforço. Compare opções gratuitas e pagas com testes práticos e rankings atualizados semanalmente. Destaque-se agora na narrativa visual.
10 ferramentas
xix.ai

Descubra as melhores ferramentas de roleplay com IA de 2026 para criar narrativas imersivas. A lista selecionada pela XIX.AI apresenta assistentes poderosos e revolucionários, capazes de estimular a narrativa criativa e a profundidade emocional. Compare as opções gratuitas com as pagas por meio de testes práticos. Comece hoje mesmo sua jornada única.
10 ferramentas
xix.ai

Descubra as melhores ferramentas de voz com IA de 2026 para desenvolvedores de jogos! A lista selecionada pela XIX.AI apresenta soluções de ponta e revolucionárias para economizar seu tempo e dinheiro na dublagem de RPGs e romances visuais. Explore comparações entre opções gratuitas e pagas, testes práticos e rankings atualizados semanalmente. Encontre hoje a ferramenta de voz perfeita para você!
10 ferramentas
xix.ai
Descubra os melhores ferramentas de repetição espaçada em AI de 2026, selecionadas por XIX.AI. Nossas escolhas mais recomendadas e revolucionárias ajudam estudantes de medicina e direito a otimizar seus horários de estudo para uma melhor retenção do conhecimento. Compare opções gratuitas e pagas com testes reais e rankings atualizados semanalmente. Desfrute agora de uma vantagem competitiva no aprendizado.
10 ferramentas
xix.ai

As melhores plataformas de IA para conversão de texto em vídeo de 2026: as ferramentas mais bem avaliadas para redação de roteiros e narrativa visual. Descubra soluções poderosas e revolucionárias para transformar seu texto em vídeos envolventes. Compare opções gratuitas e pagas com nossos rankings atualizados semanalmente e testes práticos. Encontre a plataforma perfeita para impulsionar sua criatividade e produtividade. Explore a seleção especial no XIX.AI.
10 ferramentas
xix.ai
2026 Mais recente: Descubra os melhores orquestradores multi-agente de IA para projetar fluxos de trabalho automatizados complexos através do uso da linguagem natural. Nossa lista selecionada apresenta plataformas poderosas e altamente avaliadas para uma automação de tarefas sem falhas e um gerenciamento inteligente de processos. Compare opções gratuitas e pagas com informações reais do mundo real. Desfrute de uma vantagem competitiva com as classificações atualizadas semanalmente por especialistas da XIX.AI.
10 ferramentas
xix.ai













