
















 Hogar
Hogar
La monitorización de vibraciones mejora la estabilidad de los robots móviles en terrenos irregulares

Un UGV puede desplazarse por terrenos accidentados con la ayuda de sensores de vibración. Fuente: ckybe, IA, vía Adobe Stock
Hace unos años, durante una prueba de campo, teníamos un vehículo terrestre no tripulado (UGV) de tamaño mediano que intentaba subir por un tramo de terreno irregular que parecía inofensivo. El terreno no era extremo: solo algunas piedras sueltas, un poco de polvo y una pendiente suave. No parecía haber nada de qué preocuparse.
A mitad de camino, el robot se detuvo. Entonces, una rueda se hundió ligeramente, el chasis se inclinó hacia delante y, antes de que nadie pudiera intervenir, volcó.
¿Lo extraño? Las imágenes de la cámara parecían normales. El lidar tampoco detectó ningún peligro importante. Según los datos, el camino se suponía que era «seguro».
Sin embargo, el robot percibió el peligro antes que nosotros. Simplemente no pudo traducir esa sensación en acción.
Esta desconexión entre lo que ve un robot y lo que experimenta físicamente es la clave de la estabilidad de los robots móviles en terrenos irregulares.
En el mundo real, el terreno puede ser engañoso. Una superficie puede parecer sólida, pero volverse polvorienta bajo el peso. Las rocas pueden esconderse bajo una fina capa de tierra. Incluso los surcos poco profundos pueden redistribuir la carga lo suficiente como para empujar a un UGV más allá de su punto de vuelco. Y una vez que eso ocurre, la recuperación rara vez es fluida.
Los sistemas de navegación actuales siguen basándose en gran medida en la visión. Las cámaras, el lidar y el SLAM son excelentes para la cartografía. Pero no pueden decirte cómo reaccionará el suelo al pasar por encima. Ahí es donde se producen los fallos.
La monitorización de vibraciones ofrece un enfoque diferente. En lugar de basarse únicamente en la percepción externa, el robot empieza a escuchar su propio cuerpo. Cada bache, microdeslizamiento e impacto genera datos. Cuando se toman en serio estas señales, se convierten en predictivas.
Piénsalo como una persona que camina sobre grava suelta. No analizas visualmente cada paso. Lo sientes. Los sutiles cambios bajo tus pies te indican cuándo debes reducir la velocidad, ajustar el equilibrio o cambiar de dirección.
Ese es el tipo de conciencia que queremos dotar a los robots.
Lo que sigue no es una discusión teórica. Se basa en lo que funciona en la práctica: cómo capturar datos de vibración, qué revelan y cómo utilizarlos para mantener estable al robot cuando el terreno se vuelve impredecible.
Por qué las señales de vibración son cruciales para la estabilidad
Empecemos con una pregunta fundamental que suelen plantearse los ingenieros: ¿Cómo influyen realmente las vibraciones en la estabilidad?
La respuesta breve: no solo la influyen, sino que la revelan.
Cada vez que una rueda interactúa con el suelo, genera una fuerza. Esta fuerza no es constante. Cambia dependiendo de si la superficie es dura, blanda, irregular o inestable. Estas variaciones se transmiten al robot en forma de vibraciones.
Si las ignoras, no son más que ruido. Si las analizas, se convierten en información valiosa.
En una prueba todoterreno, condujimos el mismo robot por tres superficies: tierra compacta, grava suelta y arena blanda. A simple vista, las tres parecían manejables. Pero sus perfiles de vibración eran completamente distintos.
Sobre tierra compacta, la señal era estable: de baja amplitud y constante.
Sobre grava, se volvió caótica, con picos bruscos y vibraciones de alta frecuencia.
En la arena, todo se ralentizó. La señal se volvió más pesada, casi lenta, con oscilaciones de baja frecuencia perceptibles. Esta distinción es fundamental.
Los picos de alta frecuencia suelen indicar impactos: choques contra rocas, escombros o bordes duros. Estos momentos pueden alterar repentinamente la distribución de la carga y provocar inestabilidad.
Las oscilaciones de baja frecuencia son más sutiles, pero igualmente peligrosas. A menudo indican una pérdida de apoyo, como cuando una rueda se hunde o resbala. No se produce una sacudida repentina; en cambio, la estabilidad se erosiona gradualmente.
Aquí está el punto clave: a menudo se sienten estos efectos antes de verlos.
Nos encontramos con esto durante las pruebas del rover. Una sección del terreno parecía lisa porque una fina capa de arena cubría las rocas incrustadas. Las cámaras mostraban un terreno llano. El lidar detectó una superficie limpia.
Pero la IMU contaba una historia diferente. En cuanto las ruedas rodaron sobre las rocas ocultas, la señal de vibración se iluminó con picos de alta frecuencia. Esto proporcionó una alerta temprana, antes de que el robot comenzara a desestabilizarse.
Ese es el poder de la detección de vibraciones. No depende de la visibilidad. No se ve afectada por la iluminación ni por el polvo. Refleja la física real del contacto.
En entornos difíciles, esa es a menudo la única verdad que importa.
Sensores básicos para la monitorización de vibraciones
Si la vibración es la señal, los sensores son tus oídos. Y, al igual que con cualquier sistema de detección, la ubicación y la calidad importan más de lo que muchos creen.
En esencia, se trabaja con tres componentes: acelerómetros, giroscopios y unidades de medición inercial (IMU).
Los acelerómetros hacen el trabajo pesado. Miden la aceleración lineal a lo largo de tres ejes, captando tanto los golpes como la vibración continua. Si una rueda golpea una roca, el acelerómetro lo detecta al instante. Si el chasis oscila, eso también se nota.
Los giroscopios añaden otra capa. Registran el movimiento angular: balanceo, cabeceo y guiñada. Esto te indica si el robot está empezando a inclinarse o girar de una forma que podría provocar que se vuelque.
Si se combinan ambos, se obtiene una IMU. La mayoría de los sistemas modernos se basan en las IMU porque proporcionan una visión completa del movimiento.
Pero la experiencia en el mundo real demuestra que la ubicación de los sensores es tan importante como los propios sensores.
Montar una IMU en el centro de masa es una práctica habitual, y por una buena razón. Proporciona una referencia estable para el movimiento general. Sin embargo, si eso es todo lo que utilizas, te perderás detalles cruciales.
En terrenos accidentados, la mayor parte de la acción tiene lugar en las ruedas. Hemos obtenido mejores resultados añadiendo acelerómetros secundarios más cerca de los conjuntos de ruedas. Estos captan impactos localizados que no se propagan completamente hasta el centro del chasis.
Otro error común es el montaje blando. Puede parecer insignificante, pero es importante. Si el soporte del sensor se flexiona aunque sea ligeramente, ya no estás midiendo la vibración real, sino una versión filtrada. Esto lleva a conclusiones erróneas.
La frecuencia de muestreo es otra consideración práctica. Para la mayoría de los robots móviles, un rango de 100 a 500 Hz es suficiente. Si es demasiado baja, se pierden eventos críticos. Si es demasiado alta, se añade una sobrecarga de procesamiento sin un beneficio significativo.
En cuanto al hardware, no se necesitan componentes exóticos. Hay muchos sensores acelerómetros fiables que pueden soportar entornos hostiles sin salirse del presupuesto. La calibración y la consistencia son mucho más importantes.
Técnicas de procesamiento de vibraciones en tiempo real
Los datos de vibración sin procesar son confusos. Si alguna vez los has representado gráficamente directamente desde una IMU, sabes a qué me refiero: parecen ruido.
El truco no está en limpiarlos por completo, sino en limpiarlos lo justo para revelar patrones.
El primer paso es el filtrado. Los motores, las cajas de cambios e incluso la resonancia estructural introducen sus propias vibraciones. Si no se abordan, ahogarán las señales del terreno.
Normalmente empezamos con un filtro de paso de banda para aislar el rango de frecuencias en el que se produce la interacción con el terreno. A continuación, si hay una fuente de ruido conocida, como un motor que gira a una frecuencia fija, aplicamos un filtro notch para eliminarla.
He visto casos en los que un simple filtro de muesca ha convertido datos inutilizables en firmas claras del terreno. Una vez que la señal es utilizable, se pasa al análisis.
El análisis en el dominio del tiempo muestra cómo evoluciona la señal. Pero es en el análisis en el dominio de la frecuencia donde las cosas se ponen interesantes. Utilizando la FFT, se puede ver exactamente dónde se concentra la energía.
Los diferentes terrenos dejan huellas distintivas. La grava distribuye la energía por las frecuencias altas. La hierba se sitúa en el rango medio. La arena desplaza todo hacia frecuencias más bajas y lo amortigua.
A partir de ahí, se extraen características. No docenas, solo unas pocas significativas. Amplitud RMS, potencia espectral y quizás la varianza. Eso suele ser suficiente.
Una vez construimos un sencillo clasificador de terrenos utilizando solo unas pocas de estas características y logramos una precisión de casi el 90 % a bajas velocidades. Nada sofisticado, sin aprendizaje profundo. Solo datos limpios y una buena selección de características.
¿La lección clave? No siempre se necesitan modelos complejos. Se necesitan buenas señales.
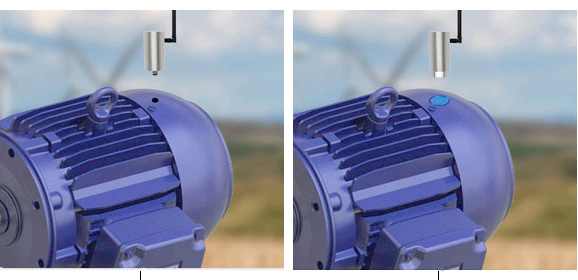
Diferentes métodos para conectar un sensor de vibración de tres ejes. Fuente: ATO
Predicción de la estabilidad a partir de datos de vibración
Aquí es donde las cosas se ponen interesantes. La mayoría de los sistemas reaccionan a la inestabilidad una vez que esta ha comenzado. Para entonces, ya estás en problemas. La monitorización de vibraciones te permite pasar de la reacción a la predicción.
Tradicionalmente, los ingenieros se basan en métricas como el margen de estabilidad o los modelos de distribución de fuerzas. Estos funcionan bien en entornos controlados, pero fallan cuando el comportamiento del terreno cambia de forma impredecible.
Los datos de vibración cubren esa laguna. En lugar de estimar las fuerzas basándose únicamente en modelos, se deducen a partir de la interacción real. Esto hace que la evaluación de la estabilidad esté más basada en la realidad.
Recientemente, los enfoques basados en el aprendizaje han ganado terreno en este ámbito. Introduce datos de aceleración, velocidad angular y velocidad en un modelo, y este genera una puntuación de estabilidad.
Lo que impresiona es lo bien que se generalizan estos modelos.
En una prueba, entrenamos un modelo sobre hierba, grava y tierra. Luego lo ejecutamos en un terreno mixto que nunca había visto. Aún así funcionó bien: no a la perfección, pero sí de forma útil.
En la práctica, esto permite comportamientos como el control de acceso.
Teníamos un UGV con un pequeño brazo manipulador. Cuando los niveles de vibración superaban un umbral, el sistema detenía automáticamente el movimiento del brazo. Esto por sí solo evitó varios incidentes en los que el vehículo estuvo a punto de volcarse.
La idea importante aquí no es el modelo en sí mismo. Es que la estabilidad se convierte en algo que se supervisa continuamente, no en algo que se comprueba a posteriori.
Estrategias de control para mejorar el equilibrio
Una vez que confíes en tus datos de vibración, puedes empezar a utilizarlos en el control. El enfoque más sencillo es la adaptación de la velocidad, y es uno de los más eficaces. Cuando la vibración aumenta, reduce la velocidad. Eso es todo.
Suena básico, pero funciona porque la mayoría de los problemas de inestabilidad varían con la velocidad. Una velocidad menor implica fuerzas dinámicas menores, lo que le da a su sistema más tiempo para reaccionar.
Más allá de eso, puede introducir los datos de vibración en sus bucles de control. Los controladores PID, por ejemplo, pueden beneficiarse de una entrada adicional que refleje los niveles de perturbación. Esto ayuda a reducir las oscilaciones y mejora la respuesta.
La fusión de sensores también desempeña un papel importante. Los datos de vibración por sí solos son muy útiles, pero combinarlos con odometría o retroalimentación visual los hace aún más fiables.
Una mejora práctica que observamos provino de la eliminación del ruido interno. Al filtrar las vibraciones mecánicas de los componentes internos, el sistema de control se volvió notablemente más fluido: menos fluctuaciones, mejor equilibrio.
A veces, las mejoras en la estabilidad no se deben a una mayor complejidad, sino a la eliminación del ruido.
Retos de implementación y soluciones
Por supuesto, nada de esto es «plug-and-play». El ruido es el mayor desafío. No todas las vibraciones son útiles. Algunas provienen de los motores, otras de la estructura y otras del entorno. El objetivo es separar la señal del ruido sin perder información importante.

Un pequeño sensor IMU para robots y drones. Fuente: ATO
La deriva del sensor es otro problema, especialmente con los giroscopios. Los pequeños errores se acumulan con el tiempo. Ahí es donde las técnicas de fusión de sensores, como el filtrado de Kalman, se vuelven esenciales.
Luego está la variabilidad. Si se cambia la velocidad o la carga útil del robot, el perfil de vibración también cambia. Si el sistema no está diseñado para gestionar eso, el rendimiento cae rápidamente.
La única solución real son las pruebas: no pruebas controladas en laboratorio, sino terreno real, condiciones reales, casos extremos reales. Ahí es donde los sistemas demuestran su valía.
Los robots necesitan sentir el suelo
Si hay una conclusión que destacar, es esta: los robots necesitan sentir el suelo, no solo verlo.
La estabilidad de los robots móviles en terrenos irregulares no se resolverá solo con mejores mapas. Requiere una conexión más profunda entre la máquina y su entorno.
La monitorización de vibraciones proporciona esa conexión. Convierte los impactos, los resbalones y los desplazamientos sutiles en datos útiles. Permite a los robots anticiparse a los problemas en lugar de limitarse a reaccionar ante ellos. En entornos donde un solo error puede acabar con una misión, eso marca la diferencia.
La tecnología no está fuera de nuestro alcance. Una configuración sólida de la IMU, un procesamiento bien pensado y las pruebas de campo pueden llevarte muy lejos. A partir de ahí, es cuestión de iteración.
Porque el terreno siempre te sorprenderá. El objetivo es asegurarte de que tu robot no se quede sorprendido por mucho tiempo.
 Sobre el autor
Sobre el autor
Faisal Mahmood es un experimentado estratega de marketing digital y contenido tecnológico con amplia experiencia en IA, desarrollo de software y contenido orientado al SEO. Se especializa en crear artículos bien documentados y basados en hechos que ayudan a desarrolladores, empresas y equipos tecnológicos a comprender las últimas tendencias en herramientas impulsadas por IA, mejores prácticas de programación y desarrollo de software seguro.
A Mahmood le apasiona tender puentes entre la tecnología emergente y los conocimientos prácticos para un público global. Puedes contactar con él en [email protected].
Artículo relacionado
 Aspectos destacados del documento de oferta pública inicial de SpaceX: las ambiciones de expansión en internet por satélite y inteligencia artificial
En su declaración de registro S-1 presentada antes de lo que se espera sea su oferta pública inicial, SpaceX reveló recientemente una serie de impresionantes indicadores comerciales que destacan su sólida posición en las comunicaciones aeroespaciales
Alibaba Tuhao M890 debuta con un triple rendimiento, marcando el inicio de una nueva era de agentes full-stack para modelos de inferencia basados en chips y nube.
El 20 de mayo de 2026, en la Cumbre de Alibaba Cloud, esta compañía anunció la finalización de una actualización del sistema tecnológico completo diseñado para la era de los agentes inteligentes. Esta transformación reconfiguró todo el proceso, desde
Pentium 4 Revival: Una CPU de 20 años de antigüedad ejecuta el modelo grande Meta Llama 3
Recientemente, el canal técnico de YouTube Fully Buffered llevó a cabo un experimento impresionante y riguroso: lograron ejecutar con éxito el último modelo grande de Meta, Llama 3.2 3B, en un procesador Pentium 4 641, un chip lanzado en 2006.Esta p
Recomendaciones de temas especiales relacionados
Creación de vídeos
Aspectos destacados del documento de oferta pública inicial de SpaceX: las ambiciones de expansión en internet por satélite y inteligencia artificial
En su declaración de registro S-1 presentada antes de lo que se espera sea su oferta pública inicial, SpaceX reveló recientemente una serie de impresionantes indicadores comerciales que destacan su sólida posición en las comunicaciones aeroespaciales
Alibaba Tuhao M890 debuta con un triple rendimiento, marcando el inicio de una nueva era de agentes full-stack para modelos de inferencia basados en chips y nube.
El 20 de mayo de 2026, en la Cumbre de Alibaba Cloud, esta compañía anunció la finalización de una actualización del sistema tecnológico completo diseñado para la era de los agentes inteligentes. Esta transformación reconfiguró todo el proceso, desde
Pentium 4 Revival: Una CPU de 20 años de antigüedad ejecuta el modelo grande Meta Llama 3
Recientemente, el canal técnico de YouTube Fully Buffered llevó a cabo un experimento impresionante y riguroso: lograron ejecutar con éxito el último modelo grande de Meta, Llama 3.2 3B, en un procesador Pentium 4 641, un chip lanzado en 2006.Esta p
Recomendaciones de temas especiales relacionados
Creación de vídeos
 Los mejores creadores de vídeos con IA para podcasters: convierte ondas de audio en atractivos vídeos con rostros en primer plano
Los mejores creadores de vídeos con IA para podcasters: convierte ondas de audio en atractivos vídeos con rostros en primer plano
Descubre los mejores creadores de vídeos con IA para podcasters de 2026 en XIX.AI. Nuestra lista, cuidadosamente seleccionada y con las mejores valoraciones, incluye potentes herramientas que convierten tu audio en atractivos vídeos de «talking head» sin esfuerzo. Compara las opciones gratuitas con las de pago gracias a pruebas reales y a clasificaciones que se actualizan semanalmente. Aprovecha ahora tu ventaja en la narración visual.
 10 herramientas
10 herramientas
 xix.ai
chatbot
Crea tu propia historia de amor con IA gracias a estas herramientas de juego de rol
xix.ai
chatbot
Crea tu propia historia de amor con IA gracias a estas herramientas de juego de rol
Descubre las mejores herramientas de rol basadas en IA de 2026 para crear narrativas envolventes. La selección de XIX.AI incluye potentes asistentes revolucionarios que te permitirán desarrollar una narrativa creativa y una gran profundidad emocional. Compara las opciones gratuitas con las de pago mediante pruebas reales. Empieza hoy mismo tu viaje único.
10 herramientas
xix.ai
Texto a voz
Las mejores herramientas de voz con IA para desarrolladores de videojuegos independientes: ahorra tiempo en la grabación de voces para juegos de rol y novelas visuales
¡Descubre las mejores herramientas de voz con IA de 2026 para desarrolladores de videojuegos! La lista seleccionada por XIX.AI incluye soluciones de primera categoría que marcarán un antes y un después, y que te permitirán ahorrar tiempo y dinero en la locución de juegos de rol y novelas visuales. Explora comparativas entre opciones gratuitas y de pago, pruebas en condiciones reales y clasificaciones que se actualizan semanalmente. ¡Encuentra hoy mismo tu herramienta de voz perfecta!
10 herramientas
xix.ai
Educación y aprendizaje
Los mejores herramientas de repetición espaciada con IA: optimiza los horarios de estudio para estudiantes de medicina y derecho
Descubra los mejores herramientas de repetición espacial de IA para 2026, seleccionadas por XIX.AI. Nuestras opciones más recomendadas y revolucionarias ayudan a estudiantes de medicina y derecho a optimizar sus horarios de estudio para lograr un mayor retención del conocimiento. Compare las opciones gratuitas con las pagas mediante pruebas reales y clasificaciones actualizadas semanalmente. Despliegue todo su potencial de aprendizaje ahora mismo.
10 herramientas
xix.ai
Creación de vídeos
Las mejores plataformas de IA para convertir texto en vídeo, destinadas a la redacción de guiones y la narración visual
Las mejores plataformas de IA para convertir texto en vídeo de 2026: las herramientas mejor valoradas para la redacción de guiones y la narración visual. Descubre soluciones potentes y revolucionarias para transformar tu texto en vídeos atractivos. Compara las opciones gratuitas con las de pago gracias a nuestras clasificaciones, que se actualizan semanalmente, y a nuestras pruebas en condiciones reales. Encuentra la plataforma perfecta para potenciar tu creatividad y productividad. Explora la selección cuidada de XIX.AI.
10 herramientas
xix.ai
chatbot
Orquestadores de Agentes Multiservidores AI: Diseño de Flujos de Trabajo Automatizados y Complejos a través del Lenguaje Natural
2026 Últimas novedades: Descubra los mejores herramientas de inteligencia artificial para diseñar flujos de trabajo automatizados complejos a través del lenguaje natural. Nuestra lista seleccionada incluye las plataformas más reconocidas y potentes para una automatización de tareas sin problemas y una gestión inteligente de procesos. Compare opciones gratuitas y pagadas con información basada en casos reales. Despliegue todo su potencial con las clasificaciones actualizadas semanalmente por expertos de XIX.AI.
10 herramientas
xix.ai

 comentario (0)
0/500
comentario (0)
0/500
Un UGV puede desplazarse por terrenos accidentados con la ayuda de sensores de vibración. Fuente: ckybe, IA, vía Adobe Stock
Hace unos años, durante una prueba de campo, teníamos un vehículo terrestre no tripulado (UGV) de tamaño mediano que intentaba subir por un tramo de terreno irregular que parecía inofensivo. El terreno no era extremo: solo algunas piedras sueltas, un poco de polvo y una pendiente suave. No parecía haber nada de qué preocuparse.
A mitad de camino, el robot se detuvo. Entonces, una rueda se hundió ligeramente, el chasis se inclinó hacia delante y, antes de que nadie pudiera intervenir, volcó.
¿Lo extraño? Las imágenes de la cámara parecían normales. El lidar tampoco detectó ningún peligro importante. Según los datos, el camino se suponía que era «seguro».
Sin embargo, el robot percibió el peligro antes que nosotros. Simplemente no pudo traducir esa sensación en acción.
Esta desconexión entre lo que ve un robot y lo que experimenta físicamente es la clave de la estabilidad de los robots móviles en terrenos irregulares.
En el mundo real, el terreno puede ser engañoso. Una superficie puede parecer sólida, pero volverse polvorienta bajo el peso. Las rocas pueden esconderse bajo una fina capa de tierra. Incluso los surcos poco profundos pueden redistribuir la carga lo suficiente como para empujar a un UGV más allá de su punto de vuelco. Y una vez que eso ocurre, la recuperación rara vez es fluida.
Los sistemas de navegación actuales siguen basándose en gran medida en la visión. Las cámaras, el lidar y el SLAM son excelentes para la cartografía. Pero no pueden decirte cómo reaccionará el suelo al pasar por encima. Ahí es donde se producen los fallos.
La monitorización de vibraciones ofrece un enfoque diferente. En lugar de basarse únicamente en la percepción externa, el robot empieza a escuchar su propio cuerpo. Cada bache, microdeslizamiento e impacto genera datos. Cuando se toman en serio estas señales, se convierten en predictivas.
Piénsalo como una persona que camina sobre grava suelta. No analizas visualmente cada paso. Lo sientes. Los sutiles cambios bajo tus pies te indican cuándo debes reducir la velocidad, ajustar el equilibrio o cambiar de dirección.
Ese es el tipo de conciencia que queremos dotar a los robots.
Lo que sigue no es una discusión teórica. Se basa en lo que funciona en la práctica: cómo capturar datos de vibración, qué revelan y cómo utilizarlos para mantener estable al robot cuando el terreno se vuelve impredecible.
Por qué las señales de vibración son cruciales para la estabilidad
Empecemos con una pregunta fundamental que suelen plantearse los ingenieros: ¿Cómo influyen realmente las vibraciones en la estabilidad?
La respuesta breve: no solo la influyen, sino que la revelan.
Cada vez que una rueda interactúa con el suelo, genera una fuerza. Esta fuerza no es constante. Cambia dependiendo de si la superficie es dura, blanda, irregular o inestable. Estas variaciones se transmiten al robot en forma de vibraciones.
Si las ignoras, no son más que ruido. Si las analizas, se convierten en información valiosa.
En una prueba todoterreno, condujimos el mismo robot por tres superficies: tierra compacta, grava suelta y arena blanda. A simple vista, las tres parecían manejables. Pero sus perfiles de vibración eran completamente distintos.
Sobre tierra compacta, la señal era estable: de baja amplitud y constante.
Sobre grava, se volvió caótica, con picos bruscos y vibraciones de alta frecuencia.
En la arena, todo se ralentizó. La señal se volvió más pesada, casi lenta, con oscilaciones de baja frecuencia perceptibles. Esta distinción es fundamental.
Los picos de alta frecuencia suelen indicar impactos: choques contra rocas, escombros o bordes duros. Estos momentos pueden alterar repentinamente la distribución de la carga y provocar inestabilidad.
Las oscilaciones de baja frecuencia son más sutiles, pero igualmente peligrosas. A menudo indican una pérdida de apoyo, como cuando una rueda se hunde o resbala. No se produce una sacudida repentina; en cambio, la estabilidad se erosiona gradualmente.
Aquí está el punto clave: a menudo se sienten estos efectos antes de verlos.
Nos encontramos con esto durante las pruebas del rover. Una sección del terreno parecía lisa porque una fina capa de arena cubría las rocas incrustadas. Las cámaras mostraban un terreno llano. El lidar detectó una superficie limpia.
Pero la IMU contaba una historia diferente. En cuanto las ruedas rodaron sobre las rocas ocultas, la señal de vibración se iluminó con picos de alta frecuencia. Esto proporcionó una alerta temprana, antes de que el robot comenzara a desestabilizarse.
Ese es el poder de la detección de vibraciones. No depende de la visibilidad. No se ve afectada por la iluminación ni por el polvo. Refleja la física real del contacto.
En entornos difíciles, esa es a menudo la única verdad que importa.
Sensores básicos para la monitorización de vibraciones
Si la vibración es la señal, los sensores son tus oídos. Y, al igual que con cualquier sistema de detección, la ubicación y la calidad importan más de lo que muchos creen.
En esencia, se trabaja con tres componentes: acelerómetros, giroscopios y unidades de medición inercial (IMU).
Los acelerómetros hacen el trabajo pesado. Miden la aceleración lineal a lo largo de tres ejes, captando tanto los golpes como la vibración continua. Si una rueda golpea una roca, el acelerómetro lo detecta al instante. Si el chasis oscila, eso también se nota.
Los giroscopios añaden otra capa. Registran el movimiento angular: balanceo, cabeceo y guiñada. Esto te indica si el robot está empezando a inclinarse o girar de una forma que podría provocar que se vuelque.
Si se combinan ambos, se obtiene una IMU. La mayoría de los sistemas modernos se basan en las IMU porque proporcionan una visión completa del movimiento.
Pero la experiencia en el mundo real demuestra que la ubicación de los sensores es tan importante como los propios sensores.
Montar una IMU en el centro de masa es una práctica habitual, y por una buena razón. Proporciona una referencia estable para el movimiento general. Sin embargo, si eso es todo lo que utilizas, te perderás detalles cruciales.
En terrenos accidentados, la mayor parte de la acción tiene lugar en las ruedas. Hemos obtenido mejores resultados añadiendo acelerómetros secundarios más cerca de los conjuntos de ruedas. Estos captan impactos localizados que no se propagan completamente hasta el centro del chasis.
Otro error común es el montaje blando. Puede parecer insignificante, pero es importante. Si el soporte del sensor se flexiona aunque sea ligeramente, ya no estás midiendo la vibración real, sino una versión filtrada. Esto lleva a conclusiones erróneas.
La frecuencia de muestreo es otra consideración práctica. Para la mayoría de los robots móviles, un rango de 100 a 500 Hz es suficiente. Si es demasiado baja, se pierden eventos críticos. Si es demasiado alta, se añade una sobrecarga de procesamiento sin un beneficio significativo.
En cuanto al hardware, no se necesitan componentes exóticos. Hay muchos sensores acelerómetros fiables que pueden soportar entornos hostiles sin salirse del presupuesto. La calibración y la consistencia son mucho más importantes.
Técnicas de procesamiento de vibraciones en tiempo real
Los datos de vibración sin procesar son confusos. Si alguna vez los has representado gráficamente directamente desde una IMU, sabes a qué me refiero: parecen ruido.
El truco no está en limpiarlos por completo, sino en limpiarlos lo justo para revelar patrones.
El primer paso es el filtrado. Los motores, las cajas de cambios e incluso la resonancia estructural introducen sus propias vibraciones. Si no se abordan, ahogarán las señales del terreno.
Normalmente empezamos con un filtro de paso de banda para aislar el rango de frecuencias en el que se produce la interacción con el terreno. A continuación, si hay una fuente de ruido conocida, como un motor que gira a una frecuencia fija, aplicamos un filtro notch para eliminarla.
He visto casos en los que un simple filtro de muesca ha convertido datos inutilizables en firmas claras del terreno. Una vez que la señal es utilizable, se pasa al análisis.
El análisis en el dominio del tiempo muestra cómo evoluciona la señal. Pero es en el análisis en el dominio de la frecuencia donde las cosas se ponen interesantes. Utilizando la FFT, se puede ver exactamente dónde se concentra la energía.
Los diferentes terrenos dejan huellas distintivas. La grava distribuye la energía por las frecuencias altas. La hierba se sitúa en el rango medio. La arena desplaza todo hacia frecuencias más bajas y lo amortigua.
A partir de ahí, se extraen características. No docenas, solo unas pocas significativas. Amplitud RMS, potencia espectral y quizás la varianza. Eso suele ser suficiente.
Una vez construimos un sencillo clasificador de terrenos utilizando solo unas pocas de estas características y logramos una precisión de casi el 90 % a bajas velocidades. Nada sofisticado, sin aprendizaje profundo. Solo datos limpios y una buena selección de características.
¿La lección clave? No siempre se necesitan modelos complejos. Se necesitan buenas señales.
Diferentes métodos para conectar un sensor de vibración de tres ejes. Fuente: ATO
Predicción de la estabilidad a partir de datos de vibración
Aquí es donde las cosas se ponen interesantes. La mayoría de los sistemas reaccionan a la inestabilidad una vez que esta ha comenzado. Para entonces, ya estás en problemas. La monitorización de vibraciones te permite pasar de la reacción a la predicción.
Tradicionalmente, los ingenieros se basan en métricas como el margen de estabilidad o los modelos de distribución de fuerzas. Estos funcionan bien en entornos controlados, pero fallan cuando el comportamiento del terreno cambia de forma impredecible.
Los datos de vibración cubren esa laguna. En lugar de estimar las fuerzas basándose únicamente en modelos, se deducen a partir de la interacción real. Esto hace que la evaluación de la estabilidad esté más basada en la realidad.
Recientemente, los enfoques basados en el aprendizaje han ganado terreno en este ámbito. Introduce datos de aceleración, velocidad angular y velocidad en un modelo, y este genera una puntuación de estabilidad.
Lo que impresiona es lo bien que se generalizan estos modelos.
En una prueba, entrenamos un modelo sobre hierba, grava y tierra. Luego lo ejecutamos en un terreno mixto que nunca había visto. Aún así funcionó bien: no a la perfección, pero sí de forma útil.
En la práctica, esto permite comportamientos como el control de acceso.
Teníamos un UGV con un pequeño brazo manipulador. Cuando los niveles de vibración superaban un umbral, el sistema detenía automáticamente el movimiento del brazo. Esto por sí solo evitó varios incidentes en los que el vehículo estuvo a punto de volcarse.
La idea importante aquí no es el modelo en sí mismo. Es que la estabilidad se convierte en algo que se supervisa continuamente, no en algo que se comprueba a posteriori.
Estrategias de control para mejorar el equilibrio
Una vez que confíes en tus datos de vibración, puedes empezar a utilizarlos en el control. El enfoque más sencillo es la adaptación de la velocidad, y es uno de los más eficaces. Cuando la vibración aumenta, reduce la velocidad. Eso es todo.
Suena básico, pero funciona porque la mayoría de los problemas de inestabilidad varían con la velocidad. Una velocidad menor implica fuerzas dinámicas menores, lo que le da a su sistema más tiempo para reaccionar.
Más allá de eso, puede introducir los datos de vibración en sus bucles de control. Los controladores PID, por ejemplo, pueden beneficiarse de una entrada adicional que refleje los niveles de perturbación. Esto ayuda a reducir las oscilaciones y mejora la respuesta.
La fusión de sensores también desempeña un papel importante. Los datos de vibración por sí solos son muy útiles, pero combinarlos con odometría o retroalimentación visual los hace aún más fiables.
Una mejora práctica que observamos provino de la eliminación del ruido interno. Al filtrar las vibraciones mecánicas de los componentes internos, el sistema de control se volvió notablemente más fluido: menos fluctuaciones, mejor equilibrio.
A veces, las mejoras en la estabilidad no se deben a una mayor complejidad, sino a la eliminación del ruido.
Retos de implementación y soluciones
Por supuesto, nada de esto es «plug-and-play». El ruido es el mayor desafío. No todas las vibraciones son útiles. Algunas provienen de los motores, otras de la estructura y otras del entorno. El objetivo es separar la señal del ruido sin perder información importante.
Un pequeño sensor IMU para robots y drones. Fuente: ATO
La deriva del sensor es otro problema, especialmente con los giroscopios. Los pequeños errores se acumulan con el tiempo. Ahí es donde las técnicas de fusión de sensores, como el filtrado de Kalman, se vuelven esenciales.
Luego está la variabilidad. Si se cambia la velocidad o la carga útil del robot, el perfil de vibración también cambia. Si el sistema no está diseñado para gestionar eso, el rendimiento cae rápidamente.
La única solución real son las pruebas: no pruebas controladas en laboratorio, sino terreno real, condiciones reales, casos extremos reales. Ahí es donde los sistemas demuestran su valía.
Los robots necesitan sentir el suelo
Si hay una conclusión que destacar, es esta: los robots necesitan sentir el suelo, no solo verlo.
La estabilidad de los robots móviles en terrenos irregulares no se resolverá solo con mejores mapas. Requiere una conexión más profunda entre la máquina y su entorno.
La monitorización de vibraciones proporciona esa conexión. Convierte los impactos, los resbalones y los desplazamientos sutiles en datos útiles. Permite a los robots anticiparse a los problemas en lugar de limitarse a reaccionar ante ellos. En entornos donde un solo error puede acabar con una misión, eso marca la diferencia.
La tecnología no está fuera de nuestro alcance. Una configuración sólida de la IMU, un procesamiento bien pensado y las pruebas de campo pueden llevarte muy lejos. A partir de ahí, es cuestión de iteración.
Porque el terreno siempre te sorprenderá. El objetivo es asegurarte de que tu robot no se quede sorprendido por mucho tiempo.
Sobre el autor
Faisal Mahmood es un experimentado estratega de marketing digital y contenido tecnológico con amplia experiencia en IA, desarrollo de software y contenido orientado al SEO. Se especializa en crear artículos bien documentados y basados en hechos que ayudan a desarrolladores, empresas y equipos tecnológicos a comprender las últimas tendencias en herramientas impulsadas por IA, mejores prácticas de programación y desarrollo de software seguro.
A Mahmood le apasiona tender puentes entre la tecnología emergente y los conocimientos prácticos para un público global. Puedes contactar con él en [email protected].










 Aspectos destacados del documento de oferta pública inicial de SpaceX: las ambiciones de expansión en internet por satélite y inteligencia artificial
En su declaración de registro S-1 presentada antes de lo que se espera sea su oferta pública inicial, SpaceX reveló recientemente una serie de impresionantes indicadores comerciales que destacan su sólida posición en las comunicaciones aeroespaciales
Aspectos destacados del documento de oferta pública inicial de SpaceX: las ambiciones de expansión en internet por satélite y inteligencia artificial
En su declaración de registro S-1 presentada antes de lo que se espera sea su oferta pública inicial, SpaceX reveló recientemente una serie de impresionantes indicadores comerciales que destacan su sólida posición en las comunicaciones aeroespaciales
 Alibaba Tuhao M890 debuta con un triple rendimiento, marcando el inicio de una nueva era de agentes full-stack para modelos de inferencia basados en chips y nube.
El 20 de mayo de 2026, en la Cumbre de Alibaba Cloud, esta compañía anunció la finalización de una actualización del sistema tecnológico completo diseñado para la era de los agentes inteligentes. Esta transformación reconfiguró todo el proceso, desde
Alibaba Tuhao M890 debuta con un triple rendimiento, marcando el inicio de una nueva era de agentes full-stack para modelos de inferencia basados en chips y nube.
El 20 de mayo de 2026, en la Cumbre de Alibaba Cloud, esta compañía anunció la finalización de una actualización del sistema tecnológico completo diseñado para la era de los agentes inteligentes. Esta transformación reconfiguró todo el proceso, desde
 Pentium 4 Revival: Una CPU de 20 años de antigüedad ejecuta el modelo grande Meta Llama 3
Recientemente, el canal técnico de YouTube Fully Buffered llevó a cabo un experimento impresionante y riguroso: lograron ejecutar con éxito el último modelo grande de Meta, Llama 3.2 3B, en un procesador Pentium 4 641, un chip lanzado en 2006.Esta p
Pentium 4 Revival: Una CPU de 20 años de antigüedad ejecuta el modelo grande Meta Llama 3
Recientemente, el canal técnico de YouTube Fully Buffered llevó a cabo un experimento impresionante y riguroso: lograron ejecutar con éxito el último modelo grande de Meta, Llama 3.2 3B, en un procesador Pentium 4 641, un chip lanzado en 2006.Esta p

Descubre los mejores creadores de vídeos con IA para podcasters de 2026 en XIX.AI. Nuestra lista, cuidadosamente seleccionada y con las mejores valoraciones, incluye potentes herramientas que convierten tu audio en atractivos vídeos de «talking head» sin esfuerzo. Compara las opciones gratuitas con las de pago gracias a pruebas reales y a clasificaciones que se actualizan semanalmente. Aprovecha ahora tu ventaja en la narración visual.
10 herramientas
xix.ai

Descubre las mejores herramientas de rol basadas en IA de 2026 para crear narrativas envolventes. La selección de XIX.AI incluye potentes asistentes revolucionarios que te permitirán desarrollar una narrativa creativa y una gran profundidad emocional. Compara las opciones gratuitas con las de pago mediante pruebas reales. Empieza hoy mismo tu viaje único.
10 herramientas
xix.ai

¡Descubre las mejores herramientas de voz con IA de 2026 para desarrolladores de videojuegos! La lista seleccionada por XIX.AI incluye soluciones de primera categoría que marcarán un antes y un después, y que te permitirán ahorrar tiempo y dinero en la locución de juegos de rol y novelas visuales. Explora comparativas entre opciones gratuitas y de pago, pruebas en condiciones reales y clasificaciones que se actualizan semanalmente. ¡Encuentra hoy mismo tu herramienta de voz perfecta!
10 herramientas
xix.ai
Descubra los mejores herramientas de repetición espacial de IA para 2026, seleccionadas por XIX.AI. Nuestras opciones más recomendadas y revolucionarias ayudan a estudiantes de medicina y derecho a optimizar sus horarios de estudio para lograr un mayor retención del conocimiento. Compare las opciones gratuitas con las pagas mediante pruebas reales y clasificaciones actualizadas semanalmente. Despliegue todo su potencial de aprendizaje ahora mismo.
10 herramientas
xix.ai

Las mejores plataformas de IA para convertir texto en vídeo de 2026: las herramientas mejor valoradas para la redacción de guiones y la narración visual. Descubre soluciones potentes y revolucionarias para transformar tu texto en vídeos atractivos. Compara las opciones gratuitas con las de pago gracias a nuestras clasificaciones, que se actualizan semanalmente, y a nuestras pruebas en condiciones reales. Encuentra la plataforma perfecta para potenciar tu creatividad y productividad. Explora la selección cuidada de XIX.AI.
10 herramientas
xix.ai
2026 Últimas novedades: Descubra los mejores herramientas de inteligencia artificial para diseñar flujos de trabajo automatizados complejos a través del lenguaje natural. Nuestra lista seleccionada incluye las plataformas más reconocidas y potentes para una automatización de tareas sin problemas y una gestión inteligente de procesos. Compare opciones gratuitas y pagadas con información basada en casos reales. Despliegue todo su potencial con las clasificaciones actualizadas semanalmente por expertos de XIX.AI.
10 herramientas
xix.ai













