
















 家
家振動モニタリングにより、起伏のある地形での移動ロボットの安定性が向上する

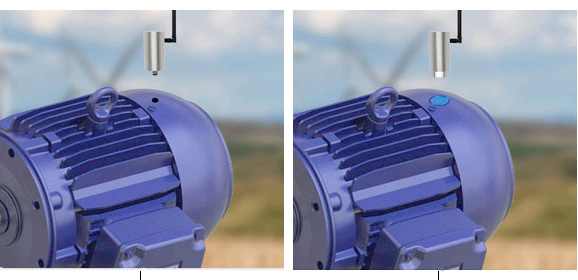
UGVは振動センサーを利用して、起伏の激しい地形を走行することができます。出典:ckybe, AI, via Adobe Stock
数年前、実地試験の際、中型無人地上車両(UGV)が、一見無害そうな起伏のある地面を登ろうとしていました。地形は極端なものではなく、ただ小石が転がり、少し埃が舞う、緩やかな傾斜がある程度でした。心配するほどのことには見えませんでした。
登り半ばで、ロボットは動きを止めた。すると、車輪の一つがわずかに沈み込み、シャーシが前方に傾き、誰かが介入する間もなく、転倒してしまった。
奇妙なことに、カメラの映像は正常に見えた。LiDARも大きな危険を検知していなかった。データによれば、その経路は「安全」であるはずだった。
それなのに、ロボットは私たちよりも先に異変を察知していた。ただ、その感覚を行動に移すことができなかったのだ。
ロボットが「見る」ものと、物理的に「体験する」ものとのこの乖離こそが、不整地における移動ロボットの安定性の核心にある。
現実の世界では、地形は見た目とは異なることがある。表面は固そうに見えても、荷重がかかると粉状になることもある。岩が薄い土の層の下に隠れていることもある。浅い轍でさえ、荷重を再配分し、UGVを転倒の限界点を超えて押し出すのに十分である。そして、いったんそうなると、回復はめったにスムーズにはいかない。
現在のナビゲーションシステムは、依然として主に視覚情報に依存しています。カメラ、LiDAR、SLAMはマッピングには優れています。しかし、実際に走行した際に地面がどのように反応するかは予測できません。そこで失敗が生じるのです。
振動モニタリングは、これとは異なるアプローチを提供します。外部からの知覚だけに頼るのではなく、ロボットは自身の体の声に耳を傾け始めます。あらゆる段差、微細なスリップ、衝撃がデータを生成します。これらの信号を真剣に受け止めれば、それらは予測可能な情報へと変わります。
まるで人が砂利道を歩いているようなものだと考えてみてください。一歩一歩を視覚的に分析することはありません。感覚で捉えるのです。足元の微妙な変化が、いつ速度を落とすべきか、バランスを調整すべきか、あるいは方向を変えるべきかを教えてくれます。
私たちがロボットに与えようとしているのは、まさにそのような「自覚」です。
以下は単なる理論的な議論ではありません。これは実践で有効な手法に基づいています。すなわち、振動データをどのように取得するか、そこから何が読み取れるか、そして地面の状況が予測不能になった際に、そのデータを活用してロボットの安定性をどう維持するか、という点です。
なぜ振動信号が安定性に不可欠なのか
まず、エンジニアがよく問う根本的な疑問から始めましょう。振動は実際に安定性にどのような影響を与えるのでしょうか?
端的に言えば、振動は安定性に影響を与えるだけでなく、それを明らかにするのです。
車輪が地面と接触するたびに、力が発生します。この力は一定ではありません。路面が硬いか、柔らかいか、凹凸があるか、あるいは変動しているかによって変化します。こうした変動は、振動としてロボット全体に伝わります。
これらを無視すれば、単なるノイズに過ぎません。しかし分析すれば、貴重な知見となります。
あるオフロード試験では、同じロボットを3種類の路面――固まった土、砕石、柔らかい砂――で走行させました。見た目には、3つとも走行可能に見えました。しかし、その振動パターンは全く異なっていました。
締まった土の上では、信号は安定しており、振幅が小さく一定でした。
砂利の上では、信号は混沌とし、鋭いスパイクと高周波のチャタリングが見られました。
砂地では、すべてが鈍化した。信号は重くなり、ほとんど鈍重になり、顕著な低周波振動が見られた。この違いは極めて重要だ。
高周波のスパイクは通常、岩や破片、あるいは硬い縁に衝突したことを示しています。こうした瞬間は、荷重分布を突然変化させ、不安定さを引き起こす可能性があります。
低周波の振動はより微妙ですが、同様に危険です。これらは、車輪が沈み込んだり滑ったりするなど、支持力の喪失を示していることがよくあります。突然の衝撃は感じられませんが、代わりに安定性が徐々に損なわれていきます。
ここで重要な点は、こうした影響は目に見える前に感じ取れることが多いということです。
これはローバーのテスト中に実際に遭遇した現象です。ある地形の区間は、岩が埋もれている上に薄い砂の層がかかっていたため、一見滑らかに見えました。カメラには平坦な地面が映り、LiDARも滑らかな表面を検知していました。
しかし、IMU(慣性計測装置)は異なる事実を伝えていました。車輪が隠れた岩の上を転がるとすぐに、振動信号は高周波のスパイクで反応しました。これにより、ロボットが不安定になり始める前に、早期の警告が得られたのです。
これこそが振動検知の力です。視認性に依存しません。照明や塵の影響も受けません。接触時の実際の物理的状況を反映するのです。
過酷な環境下では、それが唯一重要な真実であることが多いのです。
振動モニタリングの中核となるセンサー
振動が信号であるなら、センサーはあなたの耳です。そして、あらゆるセンシングシステムと同様に、設置場所と品質は多くの人が考える以上に重要です。
中核となるのは、加速度計、ジャイロスコープ、そして慣性計測ユニット(IMU)の3つのコンポーネントです。
加速度計が主力を担います。これらは3軸に沿った直線加速度を測定し、衝撃と連続的な振動の両方を捉えます。車輪が岩にぶつかった場合、加速度計は即座にそれを検知します。シャーシが振動している場合も、同様に検出されます。
ジャイロスコープは、さらに別の次元を加えます。これらは角運動、すなわちロール、ピッチ、ヨーを追跡します。これにより、ロボットが転倒につながるような傾きや回転を始めているかどうかがわかります。
これら2つを組み合わせると、IMUとなります。IMUは動きの全体像を把握できるため、現代のシステムの多くはIMUに依存しています。
しかし、実体験から、センサーそのものと同じくらい、センサーの設置位置も重要であることが分かっています。
IMUを重心に設置するのは標準的な手法であり、それには十分な理由があります。全体的な動きに対する安定した基準点を提供するからです。しかし、それだけに頼っていると、重要な詳細を見逃してしまいます。
荒れた路面では、動きの大部分は車輪で発生します。私たちは、車輪アセンブリの近くに二次的な加速度計を追加することで、より良い結果を得ることができました。これらは、シャーシの中心まで完全に伝播しない局所的な衝撃を捉えることができます。
もう一つのよくある間違いは、マウントの固定が緩いことです。些細なことのように思えるかもしれませんが、これは重大な問題です。センサーのマウントが少しでもたわんでしまうと、もはや真の振動を測定しているのではなく、フィルターがかかった状態の振動を測定していることになります。これにより、誤った結論に至ることになります。
サンプリングレートも実用上の重要な考慮事項です。ほとんどの移動ロボットにとって、100~500 Hzの範囲で十分です。低すぎると重要な事象を見逃し、高すぎると意味のあるメリットがないまま処理負荷が増大します。
ハードウェアに関しては、特殊な部品は必要ありません。予算を圧迫することなく過酷な環境に対応できる、信頼性の高い加速度センサーは数多く存在します。校正と一貫性の方がはるかに重要です。
リアルタイム振動処理技術
生の振動データは乱雑です。IMUから直接プロットしたことがある方ならお分かりでしょうが、それはノイズのように見えます。
重要なのは、データを完全にクリーンアップすることではなく、パターンを明らかにするのに十分な程度に整えることです。
最初のステップはフィルタリングです。モーター、ギアボックス、さらには構造共振までもが、独自の振動を発生させます。これらに対処しなければ、地形からの信号をかき消してしまいます。
通常、地表との相互作用が発生する周波数帯域を抽出するために、まずバンドパスフィルターから始めます。その後、モーターが一定の周波数で回転しているような既知のノイズ源がある場合は、ノッチフィルターを適用して除去します。
単純なノッチフィルターだけで、使い物にならなかったデータが明確な地形の特徴として浮かび上がった事例を目にしてきました。信号が利用可能になれば、次は解析に移ります。
時間領域解析では、信号がどのように変化するかがわかります。しかし、本当に興味深いのは周波数領域解析です。FFTを使用すれば、エネルギーがどこに集中しているかを正確に把握できます。
地形が異なれば、その指紋も異なります。砂利は高周波数帯にエネルギーを分散させます。草は中周波数帯に集中します。砂は周波数を全体的に低域へシフトさせ、エネルギーを減衰させます。
そこから特徴量を抽出します。数十個ではなく、意味のある数個だけです。RMS振幅、スペクトルパワー、そして場合によっては分散。通常、これだけで十分です。
かつて、私たちはこれら数個の特徴量だけを使ってシンプルな地形分類器を構築し、低速域で90%近い精度を達成しました。特別なことは何もしていません。ディープラーニングも使わず、ただクリーンなデータと適切な特徴量選択を行っただけです。
ここから得られる重要な教訓は?必ずしも複雑なモデルが必要というわけではない。必要なのは、良質な信号だ。
3軸振動センサーの接続方法の例。出典:ATO
振動データによる安定性予測
ここからが興味深いところです。ほとんどのシステムは、不安定状態が始まってから反応します。その時点で、すでに事態は深刻化しています。振動モニタリングを活用すれば、反応から予測へと転換できます。
従来、エンジニアは安定性マージンや力分布モデルといった指標に依存してきました。これらは制御された環境では有効ですが、地形の挙動が予測不能に変化すると機能しなくなります。
振動データがそのギャップを埋めます。モデルからの推定のみに頼るのではなく、実際の相互作用から力を推測します。これにより、安定性評価はより現実に即したものとなります。
最近では、この分野で学習ベースのアプローチが注目を集めています。加速度、角速度、速度のデータをモデルに入力すると、安定性スコアが出力されます。
驚くべきは、これらのモデルがいかに優れた汎化能力を持つかという点です。
あるテストでは、草地、砂利道、土の路面でモデルを学習させました。その後、モデルが一度も見たことのない混合地形上で実行したところ、完璧とは言えないものの、実用的なレベルで良好な性能を発揮しました。
実用面では、これにより「ゲーティング」のような動作が可能になります。
小型のマニピュレーターアームを搭載したUGV(無人地上車両)を用意しました。振動レベルが閾値を超えると、システムは自動的にアームの動きを一時停止させます。これだけで、転倒寸前の事故を数回防ぐことができました。
ここで重要なのはモデルそのものではありません。安定性が、事後的に確認するものではなく、継続的に監視すべきものになるという点です。
バランスを向上させる制御戦略
振動データを信頼できるようになれば、それを制御に活用し始められます。最も単純なアプローチは速度適応であり、これは最も効果的な手法の一つです。振動が増加したら、速度を落とす。それだけのことです。
単純なように聞こえますが、ほとんどの不安定性の問題は速度に比例して増大するため、この手法は有効です。速度を下げれば動的力が減少し、システムが反応するための時間が確保されます。
さらに、振動データを制御ループに組み込むことも可能です。例えば、PIDコントローラは、外乱レベルを反映する追加の入力信号を活用することで性能を向上させることができます。これにより、振動の抑制や応答性の向上が図れます。
センサーフュージョンも重要な役割を果たします。振動データだけでも有用ですが、走行距離データや視覚フィードバックと組み合わせることで、信頼性はさらに高まります。
私たちが確認した実用的な改善点の一つは、内部ノイズの除去によるものでした。内部コンポーネントからの機械的振動をフィルタリングすることで、制御システムは著しく滑らかになり、ジッターが減り、バランスが向上しました。
安定性の向上は、必ずしも複雑さを増すことによるものではありません。ノイズを取り除くことによってもたらされるのです。
実装上の課題と解決策
もちろん、これらはすべて「プラグアンドプレイ」で実現できるわけではありません。ノイズが最大の課題です。すべての振動が有用なわけではありません。モーター由来のもの、構造体由来のもの、環境由来のものなど、さまざまな原因があります。重要な情報を失うことなく、信号とノイズを分離することが目標です。

ロボットやドローン用の小型IMUセンサー。出典:ATO
センサーのドリフトもまた課題であり、特にジャイロスコープでは顕著です。小さな誤差が時間の経過とともに蓄積していきます。そこで、カルマンフィルタリングのようなセンサーフュージョン技術が不可欠となります。
さらに、変動性という問題もある。ロボットの速度や積載重量が変われば、振動特性も変化する。システムがそれに対応できるよう設計されていなければ、性能は急速に低下する。
唯一の実効的な解決策はテストです。制御された実験室でのテストではなく、実際の地形、実際の環境、そして実際の限界ケースでのテストです。そこでこそ、システムはその真価を発揮するのです。
ロボットは地面を感じる必要がある
もし一つだけ結論を挙げるとすれば、それは「ロボットは地面を見るだけでなく、地面を感じる必要がある」ということです。
起伏のある地形における移動ロボットの安定性は、より精度の高い地図だけでは解決できません。機械と環境とのより深いつながりが必要です。
振動モニタリングこそが、そのつながりを提供します。衝撃、スリップ、そして微細な地盤の変化を、活用可能なデータに変換するのです。これにより、ロボットは単に問題に反応するだけでなく、問題を予見できるようになります。たった一つのミスがミッションの失敗につながるような環境では、これが決定的な違いを生むのです。
この技術は決して手の届かないものではありません。堅牢なIMUのセットアップ、綿密な処理、そして実地テストを行えば、大きな進歩を遂げることができます。そこから先は、反復作業です。
なぜなら、地形は常に予期せぬ事態をもたらすからです。目標は、ロボットがそのような事態に長く戸惑うことのないようにすることです。
 著者について
著者について
ファイサル・マフムードは、AI、ソフトウェア開発、SEO主導型コンテンツにおいて豊富な経験を持つ、ベテランのデジタルマーケティングおよびテックコンテンツストラテジストです。彼は、開発者、企業、技術チームがAI搭載ツールの最新トレンド、コーディングのベストプラクティス、安全なソフトウェア開発を理解するのに役立つ、綿密な調査に基づいた事実に基づく記事の作成を専門としています。
マフムードは、新興技術と実用的な知見とのギャップを埋めることに情熱を注いでおり、世界中の読者にその価値を届けることを目指しています。連絡先は[email protected] です。
関連記事
 スペースXのIPO申請書のハイライト:衛星インターネット事業とAI分野での事業拡大への意欲
SpaceXが計画しているIPOに先立って提出したS-1登録書類の中で、同社は航空宇宙通信および人工知能分野における強力な実力を示す数々の優れた業績指標を公開しました:Starlinkの加入者数が1,000万人を超える:2026年第1四半期までに、世界中で有料Starlinkサービスを利用している加入者数は1,030万人に達し、過去1年間で倍増しました。この成長は、世界最大の低地球軌道衛星群を擁するSpaceXがブロードバンドおよびモバイル通信分野でリーダーシップを発揮していることを示していま
アリババのTuhao M890が三重の性能を発揮し、チップ・クラウド・モデル・インフェルンスにおけるフルスタックエージェントの時代を切り開く
2026年5月20日、アリババクラウドサミットにおいて、アリババクラウドは「エージェント時代」向けに設計されたフルスタック技術システムのアップグレードが完了したことを発表しました。この変革により、基盤チップやクラウドプラットフォームからモデル、推論ソリューションに至るまで、全てのパイプラインが再構築されました。これにより、アリババクラウドは24時間365日連続運用が可能な大規模エージェントを支える「AIファクトリー」としての地位を確立し、人間ユーザーへの直接的なサービス提供を超えた存在となりまし
ペンティウム4の復活:20年前に登場したCPUでMeta Llama 3の大規模モデルを実行する
最近、YouTubeのテクノロジーチャンネルFully Bufferedは、印象的で徹底的な実験を行いました。2006年に発売されたPentium 4 641プロセッサ上で、Meta社の最新大型モデルLlama 3.2 3Bを正常に動作させることに成功したのです。このテストは、現代の人工知能技術を20年前のハードウェアと対決させるものであり、LLMの基本的な互換性の限界を明らかにするとともに、多くの視聴者に「AI時代のムーアの法則がどのようにして異なる世代間で機能しているのか」と考えさせるもの
関連特集おすすめ
動画作成
スペースXのIPO申請書のハイライト:衛星インターネット事業とAI分野での事業拡大への意欲
SpaceXが計画しているIPOに先立って提出したS-1登録書類の中で、同社は航空宇宙通信および人工知能分野における強力な実力を示す数々の優れた業績指標を公開しました:Starlinkの加入者数が1,000万人を超える:2026年第1四半期までに、世界中で有料Starlinkサービスを利用している加入者数は1,030万人に達し、過去1年間で倍増しました。この成長は、世界最大の低地球軌道衛星群を擁するSpaceXがブロードバンドおよびモバイル通信分野でリーダーシップを発揮していることを示していま
アリババのTuhao M890が三重の性能を発揮し、チップ・クラウド・モデル・インフェルンスにおけるフルスタックエージェントの時代を切り開く
2026年5月20日、アリババクラウドサミットにおいて、アリババクラウドは「エージェント時代」向けに設計されたフルスタック技術システムのアップグレードが完了したことを発表しました。この変革により、基盤チップやクラウドプラットフォームからモデル、推論ソリューションに至るまで、全てのパイプラインが再構築されました。これにより、アリババクラウドは24時間365日連続運用が可能な大規模エージェントを支える「AIファクトリー」としての地位を確立し、人間ユーザーへの直接的なサービス提供を超えた存在となりまし
ペンティウム4の復活:20年前に登場したCPUでMeta Llama 3の大規模モデルを実行する
最近、YouTubeのテクノロジーチャンネルFully Bufferedは、印象的で徹底的な実験を行いました。2006年に発売されたPentium 4 641プロセッサ上で、Meta社の最新大型モデルLlama 3.2 3Bを正常に動作させることに成功したのです。このテストは、現代の人工知能技術を20年前のハードウェアと対決させるものであり、LLMの基本的な互換性の限界を明らかにするとともに、多くの視聴者に「AI時代のムーアの法則がどのようにして異なる世代間で機能しているのか」と考えさせるもの
関連特集おすすめ
動画作成
 ポッドキャスター向けのおすすめAI動画作成ツール:音声データを魅力的なトーク動画に変換
ポッドキャスター向けのおすすめAI動画作成ツール:音声データを魅力的なトーク動画に変換
XIX.AIで、ポッドキャスター向けの2026年ベストAI動画作成ツールを発見しましょう。厳選された高評価のリストには、音声データを簡単に魅力的なトークヘッド動画に変換できる強力なツールが揃っています。実際のテスト結果や毎週更新されるランキングをもとに、無料版と有料版の比較が可能です。今すぐビジュアルストーリーテリングの優位性を手に入れましょう。
 10 ツール
10 ツール
 xix.ai
チャットボット
これらのロールプレイツールで、自分だけのAIラブストーリーを作ろう
xix.ai
チャットボット
これらのロールプレイツールで、自分だけのAIラブストーリーを作ろう
没入感のある物語を紡ぐための、2026年最新の高評価AIロールプレイツールをご紹介。XIX.AIが厳選したこのリストには、創造的なストーリーテリングと情感豊かな深みを解き放つ、強力で画期的なアシスタントが揃っています。実際のテスト結果をもとに、無料版と有料版を比較しましょう。今すぐあなただけの旅を始めましょう。
10 ツール
xix.ai
テキスト読み上げ
インディーゲーム開発者向けのおすすめAIボイスツール:RPGやビジュアルノベルのボイス収録時間を短縮
ゲーム開発者必見!2026年おすすめのAIボイスツールを紹介!XIX.AIが厳選したリストには、RPGやビジュアルノベルのボイス収録にかかる時間とコストを削減する、高評価で業界を変革するソリューションが揃っています。無料版と有料版の比較、実地テスト、毎週更新されるランキングをチェックしましょう。あなたにぴったりのボイスツールを今すぐ見つけましょう!
10 ツール
xix.ai
教育と学習
最高のAIスペースドリピートツール:医学生や法律専攻の学生のための学習スケジュール最適化
2026年に最も優れたAIを活用した反復学習ツールをXIX.AIが厳選してご紹介します。私たちが推薦するこれらの画期的なツールは、医学や法律を学ぶ学生が学習計画を最適化し、知識をより効果的に定着させるのに役立ちます。無料版と有料版を実際のテスト結果や毎週更新されるランキングをもとに比較してみてください。今すぐ学習効率を高めましょう。
10 ツール
xix.ai
動画作成
脚本作成とビジュアルストーリーテリングに最適なAIテキスト・トゥ・ビデオ・プラットフォーム
2026年最新・最高のAIテキストから動画生成プラットフォーム:脚本作成やビジュアルストーリーテリングに最適なツールをご紹介。テキストを魅力的な動画に変える、画期的なソリューションをご覧ください。毎週更新されるランキングと実地テストに基づき、無料版と有料版の比較も可能です。創造性と生産性を高める、あなたにぴったりのプラットフォームを見つけましょう。XIX.AIで厳選されたラインナップをご覧ください。
10 ツール
xix.ai
チャットボット
AIマルチエージェントオーケストレーター:自然言語を通じて複雑な自動化ワークフローを設計する
2026年最新情報:自然言語を通じて複雑な自動化ワークフローを設計するための最適なAIマルチエージェントオーケストレーターを発見しましょう。当社が厳選したリストには、タスクのシームレスな自動化とインテリジェントなプロセス管理に最適な高評価の強力なプラットフォームが掲載されています。無料オプションと有料オプションを実際の使用例を交えて比較しましょう。XIX.AIが毎週更新する専門的なランキングを活用して、AIの力を最大限に引き出しましょう。
10 ツール
xix.ai

 コメント (0)
0/500
コメント (0)
0/500
UGVは振動センサーを利用して、起伏の激しい地形を走行することができます。出典:ckybe, AI, via Adobe Stock
数年前、実地試験の際、中型無人地上車両(UGV)が、一見無害そうな起伏のある地面を登ろうとしていました。地形は極端なものではなく、ただ小石が転がり、少し埃が舞う、緩やかな傾斜がある程度でした。心配するほどのことには見えませんでした。
登り半ばで、ロボットは動きを止めた。すると、車輪の一つがわずかに沈み込み、シャーシが前方に傾き、誰かが介入する間もなく、転倒してしまった。
奇妙なことに、カメラの映像は正常に見えた。LiDARも大きな危険を検知していなかった。データによれば、その経路は「安全」であるはずだった。
それなのに、ロボットは私たちよりも先に異変を察知していた。ただ、その感覚を行動に移すことができなかったのだ。
ロボットが「見る」ものと、物理的に「体験する」ものとのこの乖離こそが、不整地における移動ロボットの安定性の核心にある。
現実の世界では、地形は見た目とは異なることがある。表面は固そうに見えても、荷重がかかると粉状になることもある。岩が薄い土の層の下に隠れていることもある。浅い轍でさえ、荷重を再配分し、UGVを転倒の限界点を超えて押し出すのに十分である。そして、いったんそうなると、回復はめったにスムーズにはいかない。
現在のナビゲーションシステムは、依然として主に視覚情報に依存しています。カメラ、LiDAR、SLAMはマッピングには優れています。しかし、実際に走行した際に地面がどのように反応するかは予測できません。そこで失敗が生じるのです。
振動モニタリングは、これとは異なるアプローチを提供します。外部からの知覚だけに頼るのではなく、ロボットは自身の体の声に耳を傾け始めます。あらゆる段差、微細なスリップ、衝撃がデータを生成します。これらの信号を真剣に受け止めれば、それらは予測可能な情報へと変わります。
まるで人が砂利道を歩いているようなものだと考えてみてください。一歩一歩を視覚的に分析することはありません。感覚で捉えるのです。足元の微妙な変化が、いつ速度を落とすべきか、バランスを調整すべきか、あるいは方向を変えるべきかを教えてくれます。
私たちがロボットに与えようとしているのは、まさにそのような「自覚」です。
以下は単なる理論的な議論ではありません。これは実践で有効な手法に基づいています。すなわち、振動データをどのように取得するか、そこから何が読み取れるか、そして地面の状況が予測不能になった際に、そのデータを活用してロボットの安定性をどう維持するか、という点です。
なぜ振動信号が安定性に不可欠なのか
まず、エンジニアがよく問う根本的な疑問から始めましょう。振動は実際に安定性にどのような影響を与えるのでしょうか?
端的に言えば、振動は安定性に影響を与えるだけでなく、それを明らかにするのです。
車輪が地面と接触するたびに、力が発生します。この力は一定ではありません。路面が硬いか、柔らかいか、凹凸があるか、あるいは変動しているかによって変化します。こうした変動は、振動としてロボット全体に伝わります。
これらを無視すれば、単なるノイズに過ぎません。しかし分析すれば、貴重な知見となります。
あるオフロード試験では、同じロボットを3種類の路面――固まった土、砕石、柔らかい砂――で走行させました。見た目には、3つとも走行可能に見えました。しかし、その振動パターンは全く異なっていました。
締まった土の上では、信号は安定しており、振幅が小さく一定でした。
砂利の上では、信号は混沌とし、鋭いスパイクと高周波のチャタリングが見られました。
砂地では、すべてが鈍化した。信号は重くなり、ほとんど鈍重になり、顕著な低周波振動が見られた。この違いは極めて重要だ。
高周波のスパイクは通常、岩や破片、あるいは硬い縁に衝突したことを示しています。こうした瞬間は、荷重分布を突然変化させ、不安定さを引き起こす可能性があります。
低周波の振動はより微妙ですが、同様に危険です。これらは、車輪が沈み込んだり滑ったりするなど、支持力の喪失を示していることがよくあります。突然の衝撃は感じられませんが、代わりに安定性が徐々に損なわれていきます。
ここで重要な点は、こうした影響は目に見える前に感じ取れることが多いということです。
これはローバーのテスト中に実際に遭遇した現象です。ある地形の区間は、岩が埋もれている上に薄い砂の層がかかっていたため、一見滑らかに見えました。カメラには平坦な地面が映り、LiDARも滑らかな表面を検知していました。
しかし、IMU(慣性計測装置)は異なる事実を伝えていました。車輪が隠れた岩の上を転がるとすぐに、振動信号は高周波のスパイクで反応しました。これにより、ロボットが不安定になり始める前に、早期の警告が得られたのです。
これこそが振動検知の力です。視認性に依存しません。照明や塵の影響も受けません。接触時の実際の物理的状況を反映するのです。
過酷な環境下では、それが唯一重要な真実であることが多いのです。
振動モニタリングの中核となるセンサー
振動が信号であるなら、センサーはあなたの耳です。そして、あらゆるセンシングシステムと同様に、設置場所と品質は多くの人が考える以上に重要です。
中核となるのは、加速度計、ジャイロスコープ、そして慣性計測ユニット(IMU)の3つのコンポーネントです。
加速度計が主力を担います。これらは3軸に沿った直線加速度を測定し、衝撃と連続的な振動の両方を捉えます。車輪が岩にぶつかった場合、加速度計は即座にそれを検知します。シャーシが振動している場合も、同様に検出されます。
ジャイロスコープは、さらに別の次元を加えます。これらは角運動、すなわちロール、ピッチ、ヨーを追跡します。これにより、ロボットが転倒につながるような傾きや回転を始めているかどうかがわかります。
これら2つを組み合わせると、IMUとなります。IMUは動きの全体像を把握できるため、現代のシステムの多くはIMUに依存しています。
しかし、実体験から、センサーそのものと同じくらい、センサーの設置位置も重要であることが分かっています。
IMUを重心に設置するのは標準的な手法であり、それには十分な理由があります。全体的な動きに対する安定した基準点を提供するからです。しかし、それだけに頼っていると、重要な詳細を見逃してしまいます。
荒れた路面では、動きの大部分は車輪で発生します。私たちは、車輪アセンブリの近くに二次的な加速度計を追加することで、より良い結果を得ることができました。これらは、シャーシの中心まで完全に伝播しない局所的な衝撃を捉えることができます。
もう一つのよくある間違いは、マウントの固定が緩いことです。些細なことのように思えるかもしれませんが、これは重大な問題です。センサーのマウントが少しでもたわんでしまうと、もはや真の振動を測定しているのではなく、フィルターがかかった状態の振動を測定していることになります。これにより、誤った結論に至ることになります。
サンプリングレートも実用上の重要な考慮事項です。ほとんどの移動ロボットにとって、100~500 Hzの範囲で十分です。低すぎると重要な事象を見逃し、高すぎると意味のあるメリットがないまま処理負荷が増大します。
ハードウェアに関しては、特殊な部品は必要ありません。予算を圧迫することなく過酷な環境に対応できる、信頼性の高い加速度センサーは数多く存在します。校正と一貫性の方がはるかに重要です。
リアルタイム振動処理技術
生の振動データは乱雑です。IMUから直接プロットしたことがある方ならお分かりでしょうが、それはノイズのように見えます。
重要なのは、データを完全にクリーンアップすることではなく、パターンを明らかにするのに十分な程度に整えることです。
最初のステップはフィルタリングです。モーター、ギアボックス、さらには構造共振までもが、独自の振動を発生させます。これらに対処しなければ、地形からの信号をかき消してしまいます。
通常、地表との相互作用が発生する周波数帯域を抽出するために、まずバンドパスフィルターから始めます。その後、モーターが一定の周波数で回転しているような既知のノイズ源がある場合は、ノッチフィルターを適用して除去します。
単純なノッチフィルターだけで、使い物にならなかったデータが明確な地形の特徴として浮かび上がった事例を目にしてきました。信号が利用可能になれば、次は解析に移ります。
時間領域解析では、信号がどのように変化するかがわかります。しかし、本当に興味深いのは周波数領域解析です。FFTを使用すれば、エネルギーがどこに集中しているかを正確に把握できます。
地形が異なれば、その指紋も異なります。砂利は高周波数帯にエネルギーを分散させます。草は中周波数帯に集中します。砂は周波数を全体的に低域へシフトさせ、エネルギーを減衰させます。
そこから特徴量を抽出します。数十個ではなく、意味のある数個だけです。RMS振幅、スペクトルパワー、そして場合によっては分散。通常、これだけで十分です。
かつて、私たちはこれら数個の特徴量だけを使ってシンプルな地形分類器を構築し、低速域で90%近い精度を達成しました。特別なことは何もしていません。ディープラーニングも使わず、ただクリーンなデータと適切な特徴量選択を行っただけです。
ここから得られる重要な教訓は?必ずしも複雑なモデルが必要というわけではない。必要なのは、良質な信号だ。
3軸振動センサーの接続方法の例。出典:ATO
振動データによる安定性予測
ここからが興味深いところです。ほとんどのシステムは、不安定状態が始まってから反応します。その時点で、すでに事態は深刻化しています。振動モニタリングを活用すれば、反応から予測へと転換できます。
従来、エンジニアは安定性マージンや力分布モデルといった指標に依存してきました。これらは制御された環境では有効ですが、地形の挙動が予測不能に変化すると機能しなくなります。
振動データがそのギャップを埋めます。モデルからの推定のみに頼るのではなく、実際の相互作用から力を推測します。これにより、安定性評価はより現実に即したものとなります。
最近では、この分野で学習ベースのアプローチが注目を集めています。加速度、角速度、速度のデータをモデルに入力すると、安定性スコアが出力されます。
驚くべきは、これらのモデルがいかに優れた汎化能力を持つかという点です。
あるテストでは、草地、砂利道、土の路面でモデルを学習させました。その後、モデルが一度も見たことのない混合地形上で実行したところ、完璧とは言えないものの、実用的なレベルで良好な性能を発揮しました。
実用面では、これにより「ゲーティング」のような動作が可能になります。
小型のマニピュレーターアームを搭載したUGV(無人地上車両)を用意しました。振動レベルが閾値を超えると、システムは自動的にアームの動きを一時停止させます。これだけで、転倒寸前の事故を数回防ぐことができました。
ここで重要なのはモデルそのものではありません。安定性が、事後的に確認するものではなく、継続的に監視すべきものになるという点です。
バランスを向上させる制御戦略
振動データを信頼できるようになれば、それを制御に活用し始められます。最も単純なアプローチは速度適応であり、これは最も効果的な手法の一つです。振動が増加したら、速度を落とす。それだけのことです。
単純なように聞こえますが、ほとんどの不安定性の問題は速度に比例して増大するため、この手法は有効です。速度を下げれば動的力が減少し、システムが反応するための時間が確保されます。
さらに、振動データを制御ループに組み込むことも可能です。例えば、PIDコントローラは、外乱レベルを反映する追加の入力信号を活用することで性能を向上させることができます。これにより、振動の抑制や応答性の向上が図れます。
センサーフュージョンも重要な役割を果たします。振動データだけでも有用ですが、走行距離データや視覚フィードバックと組み合わせることで、信頼性はさらに高まります。
私たちが確認した実用的な改善点の一つは、内部ノイズの除去によるものでした。内部コンポーネントからの機械的振動をフィルタリングすることで、制御システムは著しく滑らかになり、ジッターが減り、バランスが向上しました。
安定性の向上は、必ずしも複雑さを増すことによるものではありません。ノイズを取り除くことによってもたらされるのです。
実装上の課題と解決策
もちろん、これらはすべて「プラグアンドプレイ」で実現できるわけではありません。ノイズが最大の課題です。すべての振動が有用なわけではありません。モーター由来のもの、構造体由来のもの、環境由来のものなど、さまざまな原因があります。重要な情報を失うことなく、信号とノイズを分離することが目標です。
ロボットやドローン用の小型IMUセンサー。出典:ATO
センサーのドリフトもまた課題であり、特にジャイロスコープでは顕著です。小さな誤差が時間の経過とともに蓄積していきます。そこで、カルマンフィルタリングのようなセンサーフュージョン技術が不可欠となります。
さらに、変動性という問題もある。ロボットの速度や積載重量が変われば、振動特性も変化する。システムがそれに対応できるよう設計されていなければ、性能は急速に低下する。
唯一の実効的な解決策はテストです。制御された実験室でのテストではなく、実際の地形、実際の環境、そして実際の限界ケースでのテストです。そこでこそ、システムはその真価を発揮するのです。
ロボットは地面を感じる必要がある
もし一つだけ結論を挙げるとすれば、それは「ロボットは地面を見るだけでなく、地面を感じる必要がある」ということです。
起伏のある地形における移動ロボットの安定性は、より精度の高い地図だけでは解決できません。機械と環境とのより深いつながりが必要です。
振動モニタリングこそが、そのつながりを提供します。衝撃、スリップ、そして微細な地盤の変化を、活用可能なデータに変換するのです。これにより、ロボットは単に問題に反応するだけでなく、問題を予見できるようになります。たった一つのミスがミッションの失敗につながるような環境では、これが決定的な違いを生むのです。
この技術は決して手の届かないものではありません。堅牢なIMUのセットアップ、綿密な処理、そして実地テストを行えば、大きな進歩を遂げることができます。そこから先は、反復作業です。
なぜなら、地形は常に予期せぬ事態をもたらすからです。目標は、ロボットがそのような事態に長く戸惑うことのないようにすることです。
著者について
ファイサル・マフムードは、AI、ソフトウェア開発、SEO主導型コンテンツにおいて豊富な経験を持つ、ベテランのデジタルマーケティングおよびテックコンテンツストラテジストです。彼は、開発者、企業、技術チームがAI搭載ツールの最新トレンド、コーディングのベストプラクティス、安全なソフトウェア開発を理解するのに役立つ、綿密な調査に基づいた事実に基づく記事の作成を専門としています。
マフムードは、新興技術と実用的な知見とのギャップを埋めることに情熱を注いでおり、世界中の読者にその価値を届けることを目指しています。連絡先は[email protected] です。










 スペースXのIPO申請書のハイライト:衛星インターネット事業とAI分野での事業拡大への意欲
SpaceXが計画しているIPOに先立って提出したS-1登録書類の中で、同社は航空宇宙通信および人工知能分野における強力な実力を示す数々の優れた業績指標を公開しました:Starlinkの加入者数が1,000万人を超える:2026年第1四半期までに、世界中で有料Starlinkサービスを利用している加入者数は1,030万人に達し、過去1年間で倍増しました。この成長は、世界最大の低地球軌道衛星群を擁するSpaceXがブロードバンドおよびモバイル通信分野でリーダーシップを発揮していることを示していま
スペースXのIPO申請書のハイライト:衛星インターネット事業とAI分野での事業拡大への意欲
SpaceXが計画しているIPOに先立って提出したS-1登録書類の中で、同社は航空宇宙通信および人工知能分野における強力な実力を示す数々の優れた業績指標を公開しました:Starlinkの加入者数が1,000万人を超える:2026年第1四半期までに、世界中で有料Starlinkサービスを利用している加入者数は1,030万人に達し、過去1年間で倍増しました。この成長は、世界最大の低地球軌道衛星群を擁するSpaceXがブロードバンドおよびモバイル通信分野でリーダーシップを発揮していることを示していま
 アリババのTuhao M890が三重の性能を発揮し、チップ・クラウド・モデル・インフェルンスにおけるフルスタックエージェントの時代を切り開く
2026年5月20日、アリババクラウドサミットにおいて、アリババクラウドは「エージェント時代」向けに設計されたフルスタック技術システムのアップグレードが完了したことを発表しました。この変革により、基盤チップやクラウドプラットフォームからモデル、推論ソリューションに至るまで、全てのパイプラインが再構築されました。これにより、アリババクラウドは24時間365日連続運用が可能な大規模エージェントを支える「AIファクトリー」としての地位を確立し、人間ユーザーへの直接的なサービス提供を超えた存在となりまし
アリババのTuhao M890が三重の性能を発揮し、チップ・クラウド・モデル・インフェルンスにおけるフルスタックエージェントの時代を切り開く
2026年5月20日、アリババクラウドサミットにおいて、アリババクラウドは「エージェント時代」向けに設計されたフルスタック技術システムのアップグレードが完了したことを発表しました。この変革により、基盤チップやクラウドプラットフォームからモデル、推論ソリューションに至るまで、全てのパイプラインが再構築されました。これにより、アリババクラウドは24時間365日連続運用が可能な大規模エージェントを支える「AIファクトリー」としての地位を確立し、人間ユーザーへの直接的なサービス提供を超えた存在となりまし
 ペンティウム4の復活:20年前に登場したCPUでMeta Llama 3の大規模モデルを実行する
最近、YouTubeのテクノロジーチャンネルFully Bufferedは、印象的で徹底的な実験を行いました。2006年に発売されたPentium 4 641プロセッサ上で、Meta社の最新大型モデルLlama 3.2 3Bを正常に動作させることに成功したのです。このテストは、現代の人工知能技術を20年前のハードウェアと対決させるものであり、LLMの基本的な互換性の限界を明らかにするとともに、多くの視聴者に「AI時代のムーアの法則がどのようにして異なる世代間で機能しているのか」と考えさせるもの
ペンティウム4の復活:20年前に登場したCPUでMeta Llama 3の大規模モデルを実行する
最近、YouTubeのテクノロジーチャンネルFully Bufferedは、印象的で徹底的な実験を行いました。2006年に発売されたPentium 4 641プロセッサ上で、Meta社の最新大型モデルLlama 3.2 3Bを正常に動作させることに成功したのです。このテストは、現代の人工知能技術を20年前のハードウェアと対決させるものであり、LLMの基本的な互換性の限界を明らかにするとともに、多くの視聴者に「AI時代のムーアの法則がどのようにして異なる世代間で機能しているのか」と考えさせるもの

XIX.AIで、ポッドキャスター向けの2026年ベストAI動画作成ツールを発見しましょう。厳選された高評価のリストには、音声データを簡単に魅力的なトークヘッド動画に変換できる強力なツールが揃っています。実際のテスト結果や毎週更新されるランキングをもとに、無料版と有料版の比較が可能です。今すぐビジュアルストーリーテリングの優位性を手に入れましょう。
10 ツール
xix.ai

没入感のある物語を紡ぐための、2026年最新の高評価AIロールプレイツールをご紹介。XIX.AIが厳選したこのリストには、創造的なストーリーテリングと情感豊かな深みを解き放つ、強力で画期的なアシスタントが揃っています。実際のテスト結果をもとに、無料版と有料版を比較しましょう。今すぐあなただけの旅を始めましょう。
10 ツール
xix.ai

ゲーム開発者必見!2026年おすすめのAIボイスツールを紹介!XIX.AIが厳選したリストには、RPGやビジュアルノベルのボイス収録にかかる時間とコストを削減する、高評価で業界を変革するソリューションが揃っています。無料版と有料版の比較、実地テスト、毎週更新されるランキングをチェックしましょう。あなたにぴったりのボイスツールを今すぐ見つけましょう!
10 ツール
xix.ai
2026年に最も優れたAIを活用した反復学習ツールをXIX.AIが厳選してご紹介します。私たちが推薦するこれらの画期的なツールは、医学や法律を学ぶ学生が学習計画を最適化し、知識をより効果的に定着させるのに役立ちます。無料版と有料版を実際のテスト結果や毎週更新されるランキングをもとに比較してみてください。今すぐ学習効率を高めましょう。
10 ツール
xix.ai

2026年最新・最高のAIテキストから動画生成プラットフォーム:脚本作成やビジュアルストーリーテリングに最適なツールをご紹介。テキストを魅力的な動画に変える、画期的なソリューションをご覧ください。毎週更新されるランキングと実地テストに基づき、無料版と有料版の比較も可能です。創造性と生産性を高める、あなたにぴったりのプラットフォームを見つけましょう。XIX.AIで厳選されたラインナップをご覧ください。
10 ツール
xix.ai
2026年最新情報:自然言語を通じて複雑な自動化ワークフローを設計するための最適なAIマルチエージェントオーケストレーターを発見しましょう。当社が厳選したリストには、タスクのシームレスな自動化とインテリジェントなプロセス管理に最適な高評価の強力なプラットフォームが掲載されています。無料オプションと有料オプションを実際の使用例を交えて比較しましょう。XIX.AIが毎週更新する専門的なランキングを活用して、AIの力を最大限に引き出しましょう。
10 ツール
xix.ai













