
















 Heim
Heim
Die Schwingungsüberwachung verbessert die Stabilität mobiler Roboter auf unebenem Gelände

Ein UGV kann mithilfe von Vibrationssensoren unwegsames Gelände bewältigen. Quelle: ckybe, AI, via Adobe Stock
Vor einigen Jahren versuchten wir bei einem Feldtest, ein mittelgroßes unbemanntes Bodenfahrzeug (UGV) über eine scheinbar harmlose Stelle mit unebenem Boden zu fahren. Das Gelände war nicht extrem – nur ein paar lose Steine, etwas Staub und ein sanfter Hang. Es sah nach nichts Besorgniserregendem aus.
Auf halber Höhe hielt der Roboter an. Dann sackte ein Rad leicht ein, das Fahrgestell neigte sich nach vorne, und bevor jemand eingreifen konnte, kippte er um.
Das Seltsame daran? Die Kameraaufnahmen sahen normal aus. Auch der Lidar erkannte keine größeren Gefahren. Den Daten zufolge sollte der Weg „sicher“ sein.
Doch der Roboter spürte die Gefahr, bevor wir sie wahrnahmen. Er konnte dieses Gefühl nur nicht in eine Handlung umsetzen.
Diese Diskrepanz zwischen dem, was ein Roboter sieht, und dem, was er physisch erlebt, ist der Kern der Stabilität mobiler Roboter auf unebenem Boden.
In der realen Welt kann das Gelände trügerisch sein. Eine Oberfläche mag fest aussehen, sich aber unter Gewicht pulverig anfühlen. Steine können sich unter einer dünnen Erdschicht verbergen. Selbst flache Spurrillen können die Last so verlagern, dass ein UGV seinen Kipppunkt überschreitet. Und wenn das einmal passiert, verläuft die Wiederherstellung selten reibungslos.
Heutige Navigationssysteme sind nach wie vor weitgehend bildgesteuert. Kameras, Lidar und SLAM eignen sich hervorragend für die Kartierung. Aber sie können nicht sagen, wie der Boden reagieren wird, wenn man darüberfährt. Genau dort treten Fehler auf.
Die Schwingungsüberwachung bietet einen anderen Ansatz. Anstatt sich ausschließlich auf externe Wahrnehmung zu verlassen, beginnt der Roboter, auf seinen eigenen Körper zu hören. Jede Unebenheit, jeder Mikroschlupf und jeder Aufprall erzeugt Daten. Wenn man diese Signale ernst nimmt, werden sie vorausschauend.
Stellen Sie sich das wie eine Person vor, die auf losem Kies läuft. Man analysiert nicht jeden Schritt visuell. Man spürt ihn. Feine Verschiebungen unter den Füßen sagen einem, wann man langsamer werden, das Gleichgewicht anpassen oder die Richtung ändern muss.
Genau diese Art von Wahrnehmung wollen wir Robotern vermitteln.
Was nun folgt, ist keine theoretische Diskussion. Es basiert auf dem, was in der Praxis funktioniert: wie man Vibrationsdaten erfasst, was sie verraten und wie man sie nutzt, um den Roboter stabil zu halten, wenn der Untergrund unvorhersehbar wird.
Warum Schwingungssignale für die Stabilität entscheidend sind
Beginnen wir mit einer grundlegenden Frage, die Ingenieure oft stellen: Wie beeinflussen Vibrationen eigentlich die Stabilität?
Die kurze Antwort: Sie beeinflussen sie nicht nur – sie offenbaren sie.
Jedes Mal, wenn ein Rad mit dem Boden in Kontakt kommt, erzeugt es eine Kraft. Diese Kraft ist nicht konstant. Sie ändert sich je nachdem, ob die Oberfläche hart, weich, uneben oder instabil ist. Diese Schwankungen werden als Vibrationen durch den Roboter weitergeleitet.
Wenn man sie ignoriert, sind sie nur Rauschen. Wenn man sie analysiert, werden sie zu Erkenntnissen.
In einem Offroad-Test fuhren wir denselben Roboter über drei Oberflächen: festen Boden, losen Schotter und weichen Sand. Optisch sahen alle drei befahrbar aus. Doch ihre Schwingungsprofile waren völlig unterschiedlich.
Auf festem Boden war das Signal stabil – mit geringer Amplitude und gleichmäßig.
Auf Schotter wurde es chaotisch, mit scharfen Spitzen und hochfrequentem Rattern.
Auf Sand verlangsamte sich alles. Das Signal wurde schwerer, fast träge, mit spürbaren niederfrequenten Schwingungen. Dieser Unterschied ist entscheidend.
Hochfrequente Spitzen deuten typischerweise auf Stöße hin – das Auftreffen auf Steine, Trümmer oder harte Kanten. Diese Momente können die Lastverteilung plötzlich verschieben und Instabilität auslösen.
Niederfrequente Schwingungen sind subtiler, aber ebenso gefährlich. Sie signalisieren oft einen Verlust der Bodenhaftung, etwa wenn ein Rad einsinkt oder wegrutscht. Man spürt keinen plötzlichen Ruck; stattdessen schwindet die Stabilität allmählich.
Hier ist der entscheidende Punkt: Man spürt diese Effekte oft, bevor man sie sieht.
Wir sind bei den Rover-Tests darauf gestoßen. Ein Abschnitt des Geländes sah glatt aus, weil eine dünne Sandschicht die darin eingebetteten Felsen bedeckte. Kameras zeigten ebenen Boden. Lidar erkannte eine glatte Oberfläche.
Aber die IMU erzählte eine andere Geschichte. Sobald die Räder über die versteckten Felsen rollten, leuchtete das Vibrationssignal mit hochfrequenten Spitzen auf. Dies lieferte eine Frühwarnung – noch bevor der Roboter ins Wanken geriet.
Das ist die Stärke der Vibrationsmessung. Sie ist nicht von der Sichtbarkeit abhängig. Sie wird nicht durch Beleuchtung oder Staub beeinträchtigt. Sie spiegelt die tatsächlichen physikalischen Eigenschaften des Kontakts wider.
In anspruchsvollen Umgebungen ist das oft die einzige Wahrheit, die zählt.
Kernsensoren für die Schwingungsüberwachung
Wenn die Vibration das Signal ist, sind die Sensoren Ihre Ohren. Und wie bei jedem Sensorsystem sind Platzierung und Qualität wichtiger, als vielen bewusst ist.
Im Kern arbeiten Sie mit drei Komponenten: Beschleunigungssensoren, Gyroskope und Trägheitsmesseinheiten (IMUs).
Beschleunigungssensoren leisten die Hauptarbeit. Sie messen die lineare Beschleunigung entlang dreier Achsen und erfassen sowohl Stöße als auch kontinuierliche Schwingungen. Wenn ein Rad auf einen Stein trifft, erkennt der Beschleunigungssensor dies sofort. Wenn das Fahrgestell schwingt, wird dies ebenfalls angezeigt.
Gyroskope fügen eine weitere Ebene hinzu. Sie erfassen Winkelbewegungen – Roll-, Nick- und Gierbewegung. So lässt sich erkennen, ob der Roboter sich in einer Weise neigt oder dreht, die zum Umkippen führen könnte.
Kombiniert man beides, erhält man eine IMU. Die meisten modernen Systeme setzen auf IMUs, da sie ein vollständiges Bild der Bewegung liefern.
Die Praxis zeigt jedoch, dass die Platzierung der Sensoren genauso wichtig ist wie die Sensoren selbst.
Die Montage einer IMU am Massenschwerpunkt ist gängige Praxis, und das aus gutem Grund. Sie bietet eine stabile Referenz für die Gesamtbewegung. Wenn Sie jedoch nur diese verwenden, entgehen Ihnen entscheidende Details.
Auf unebenem Gelände spielt sich der Großteil der Bewegung an den Rädern ab. Wir haben bessere Ergebnisse erzielt, indem wir zusätzliche Beschleunigungssensoren näher an den Radbaugruppen angebracht haben. Diese erfassen lokale Stöße, die sich nicht vollständig bis zur Chassismitte ausbreiten.
Ein weiterer häufiger Fehler ist eine zu weiche Befestigung. Das mag unbedeutend erscheinen, ist aber von großer Bedeutung. Wenn sich Ihre Sensorhalterung auch nur geringfügig verbiegt, messen Sie nicht mehr die tatsächlichen Schwingungen – Sie messen eine gefilterte Version. Dies führt zu falschen Schlussfolgerungen.
Die Abtastrate ist ein weiterer praktischer Aspekt. Für die meisten mobilen Roboter reicht ein Bereich von 100 bis 500 Hz aus. Ist sie zu niedrig, verpassen Sie kritische Ereignisse. Ist sie zu hoch, verursachen Sie zusätzlichen Rechenaufwand ohne nennenswerten Nutzen.
Was die Hardware angeht, benötigen Sie keine ausgefallenen Komponenten. Viele zuverlässige Beschleunigungssensoren sind für raue Umgebungen geeignet, ohne das Budget zu sprengen. Kalibrierung und Konsistenz sind weitaus wichtiger.
Techniken zur Echtzeit-Vibrationsverarbeitung
Rohdaten von Vibrationen sind unübersichtlich. Wenn Sie diese jemals direkt von einer IMU grafisch dargestellt haben, wissen Sie, was ich meine – sie sehen aus wie Rauschen.
Der Trick besteht nicht darin, sie vollständig zu bereinigen, sondern gerade so weit, dass Muster erkennbar werden.
Der erste Schritt ist die Filterung. Motoren, Getriebe und sogar strukturelle Resonanzen verursachen eigene Schwingungen. Wenn man diese nicht berücksichtigt, übertönen sie die Geländesignale.
Wir beginnen in der Regel mit einem Bandpassfilter, um den Frequenzbereich zu isolieren, in dem die Interaktion mit dem Gelände stattfindet. Wenn dann eine bekannte Rauschquelle wie ein Motor vorliegt, der mit einer festen Frequenz dreht, wenden wir ein Notch-Filter an, um diese zu entfernen.
Ich habe Fälle gesehen, in denen ein einfacher Notch-Filter unbrauchbare Daten in klare Geländesignaturen verwandelt hat. Sobald das Signal brauchbar ist, geht man zur Analyse über.
Die Zeitbereichsanalyse zeigt, wie sich das Signal entwickelt. Aber erst bei der Frequenzbereichsanalyse wird es interessant. Mit Hilfe der FFT kann man genau sehen, wo sich die Energie konzentriert.
Verschiedene Geländearten hinterlassen unterschiedliche Fingerabdrücke. Kies verteilt die Energie über hohe Frequenzen. Gras liegt im mittleren Bereich. Sand verschiebt alles nach unten und dämpft es.
Daraus extrahiert man Merkmale. Nicht Dutzende – nur ein paar aussagekräftige. RMS-Amplitude, spektrale Leistung und vielleicht Varianz. Das reicht in der Regel aus.
Wir haben einmal einen einfachen Geländeklassifikator mit nur einer Handvoll dieser Merkmale erstellt und bei niedrigen Geschwindigkeiten eine Genauigkeit von fast 90 % erreicht. Nichts Ausgefallenes – kein Deep Learning. Nur saubere Daten und eine gute Merkmalsauswahl.
Die wichtigste Erkenntnis? Man braucht nicht immer komplexe Modelle. Man braucht gute Signale.
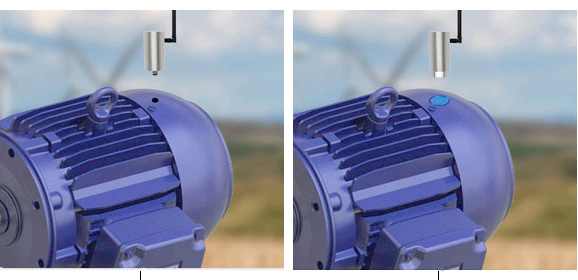
Verschiedene Methoden zum Anschluss eines dreiachsigen Schwingungssensors. Quelle: ATO
Stabilitätsvorhersage anhand von Schwingungsdaten
Hier wird es interessant. Die meisten Systeme reagieren erst auf Instabilität, nachdem sie bereits eingetreten ist. Dann steckt man schon in Schwierigkeiten. Mit Schwingungsüberwachung kann man von der Reaktion zur Vorhersage übergehen.
Traditionell verlassen sich Ingenieure auf Kennzahlen wie Stabilitätsreserven oder Kraftverteilungsmodelle. Diese funktionieren gut in kontrollierten Umgebungen, haben jedoch Schwierigkeiten, wenn sich das Geländeverhalten unvorhersehbar ändert.
Schwingungsdaten schließen diese Lücke. Anstatt Kräfte rein anhand von Modellen zu schätzen, leiten Sie diese aus der tatsächlichen Interaktion ab. Dadurch wird Ihre Stabilitätsbewertung realitätsnäher.
In letzter Zeit haben lernbasierte Ansätze in diesem Bereich an Bedeutung gewonnen. Man speist Beschleunigungs-, Winkelgeschwindigkeits- und Geschwindigkeitsdaten in ein Modell ein, und es gibt einen Stabilitätswert aus.
Beeindruckend ist, wie gut sich diese Modelle verallgemeinern lassen.
In einem Test haben wir ein Modell auf Gras, Kies und Erde trainiert. Anschließend haben wir es auf gemischtem Gelände eingesetzt, das es zuvor noch nie gesehen hatte. Es hat dennoch gut funktioniert – nicht perfekt, aber brauchbar.
In der Praxis ermöglicht dies Verhaltensweisen wie das Gating.
Wir hatten ein UGV mit einem kleinen Manipulatorarm. Wenn die Vibrationswerte einen Schwellenwert überschritten, stoppte das System automatisch die Armbewegung. Allein dadurch konnten mehrere Beinahe-Kipp-Unfälle verhindert werden.
Der entscheidende Punkt hierbei ist nicht das Modell selbst. Es geht darum, dass Stabilität zu etwas wird, das man kontinuierlich überwacht, und nicht zu etwas, das man erst im Nachhinein überprüft.
Regelungsstrategien für ein verbessertes Gleichgewicht
Sobald man seinen Schwingungsdaten vertraut, kann man sie für die Steuerung nutzen. Der einfachste Ansatz ist die Geschwindigkeitsanpassung – und er ist einer der effektivsten. Wenn die Schwingungen zunehmen, verlangsamen. Das ist alles.
Es klingt einfach, funktioniert aber, weil die meisten Instabilitätsprobleme mit der Geschwindigkeit zunehmen. Eine geringere Geschwindigkeit bedeutet geringere dynamische Kräfte, wodurch Ihr System mehr Zeit zum Reagieren hat.
Darüber hinaus können Sie Schwingungsdaten in Ihre Regelkreise einspeisen. PID-Regler können beispielsweise von einem zusätzlichen Eingang profitieren, der das Störungsniveau widerspiegelt. Dies hilft, Schwingungen zu reduzieren und die Reaktion zu verbessern.
Auch die Sensorfusion spielt eine Rolle. Vibrationsdaten allein sind aussagekräftig, aber in Kombination mit Odometrie oder visuellem Feedback werden sie noch zuverlässiger.
Eine praktische Verbesserung, die wir beobachteten, ergab sich aus der Beseitigung interner Störsignale. Durch das Herausfiltern mechanischer Schwingungen von internen Komponenten wurde das Steuerungssystem spürbar ruhiger – weniger Jitter, bessere Balance.
Manchmal resultieren Stabilitätsverbesserungen nicht aus einer Erhöhung der Komplexität. Sie entstehen durch die Beseitigung von Rauschen.
Herausforderungen bei der Implementierung und Lösungen
Natürlich ist nichts davon Plug-and-Play. Rauschen ist die größte Herausforderung. Nicht alle Schwingungen sind nützlich. Einige stammen von Motoren, andere von der Struktur, wieder andere aus der Umgebung. Das Ziel ist es, das Signal vom Rauschen zu trennen, ohne wichtige Informationen zu verlieren.

Ein kleiner IMU-Sensor für Roboter und Drohnen. Quelle: ATO
Sensordrift ist ein weiteres Problem, insbesondere bei Gyroskopen. Kleine Fehler summieren sich mit der Zeit. Hier kommen Sensorfusionstechniken wie Kalman-Filterung ins Spiel.
Dann ist da noch die Variabilität. Ändert man die Geschwindigkeit oder die Nutzlast des Roboters, ändert sich auch das Schwingungsprofil. Ist das System nicht darauf ausgelegt, sinkt die Leistung schnell.
Die einzige wirkliche Lösung ist das Testen – keine kontrollierten Labortests, sondern echtes Gelände, echte Bedingungen, echte Grenzfälle. Dort beweisen sich Systeme.
Roboter müssen den Boden spüren
Wenn es eine Erkenntnis gibt, dann diese: Roboter müssen den Boden spüren, nicht nur sehen.
Die Stabilität mobiler Roboter auf unebenem Gelände lässt sich nicht allein durch bessere Karten lösen. Sie erfordert eine tiefere Verbindung zwischen der Maschine und ihrer Umgebung.
Die Schwingungsüberwachung stellt diese Verbindung her. Sie wandelt Stöße, Rutschen und subtile Verschiebungen in verwertbare Daten um. Sie ermöglicht es Robotern, Probleme zu antizipieren, anstatt nur auf sie zu reagieren. In Umgebungen, in denen ein einziger Fehler eine Mission beenden kann, macht das den entscheidenden Unterschied.
Die Technologie ist nicht unerreichbar. Eine solide IMU-Konfiguration, durchdachte Verarbeitung und Feldtests können Sie schon weit bringen. Von da an geht es um Iteration.
Denn das Gelände wird Sie immer wieder überraschen. Das Ziel ist es, sicherzustellen, dass Ihr Roboter nicht lange überrascht ist.
 Über den Autor
Über den Autor
Faisal Mahmood ist ein erfahrener Stratege für digitales Marketing und Tech-Content mit umfassender Erfahrung in den Bereichen KI, Softwareentwicklung und SEO-optimierte Inhalte. Er ist spezialisiert auf die Erstellung fundierter, faktenbasierter Artikel, die Entwicklern, Unternehmen und Tech-Teams helfen, die neuesten Trends bei KI-gestützten Tools, Best Practices beim Programmieren und sicherer Softwareentwicklung zu verstehen.
Mahmood engagiert sich leidenschaftlich dafür, die Lücke zwischen neuen Technologien und praktischen Erkenntnissen für ein globales Publikum zu schließen. Er ist unter [email protected] erreichbar.
Verwandter Artikel
 Alibaba Tuhao M890 debütiert mit dreifacher Leistungsfähigkeit und markiert den Beginn der Ära der vollständig integrierten Agenten für das Chip-Cloud-Modell-Inferenz-Verfahren.
Am 20. Mai 2026 kündigte Alibaba Cloud auf dem Alibaba Cloud Summit die Fertigstellung eines umfassenden Upgrades des Technologiesystems an, das speziell für die Ära der Agenten entwickelt wurde. Diese Umstrukturierung prägte den gesamten Prozess – v
Pentium 4 Revival: Ein 20 Jahre alter Prozessor läuft das Meta Llama 3 Large Model
Kürzlich führte der YouTube-Technikkanal Fully Buffered ein beeindruckendes und anspruchsvolles Experiment durch: Es gelang, Metas neuestes großes Modell Llama 3.2 3B erfolgreich auf dem Pentium 4 641-Prozessor zu betreiben – einem Chip, der im Jahr
Der Bezirk Shangcheng in Hangzhou führt die ersten „goldenen zehn Maßnahmen“ der audiovisuellen Industrie in Zhejiang unter der Schirmherrschaft von AIGC durch und stellt dabei einen Industriefonds in Höhe von 5 Milliarden Yuan bereit.
Am 16. fand die AIGC Audio-Visual Industry Innovation Ecosystem Conference im Bezirk Shangcheng in Hangzhou statt. Während der Veranstaltung kündigte die Provinz ihre erste spezielle Politik für die AIGC-Audio-Visual-Branche an – „Die Goldenen Zehn“.
Empfehlungen zu verwandten Spezialthemen
Chatbot
Alibaba Tuhao M890 debütiert mit dreifacher Leistungsfähigkeit und markiert den Beginn der Ära der vollständig integrierten Agenten für das Chip-Cloud-Modell-Inferenz-Verfahren.
Am 20. Mai 2026 kündigte Alibaba Cloud auf dem Alibaba Cloud Summit die Fertigstellung eines umfassenden Upgrades des Technologiesystems an, das speziell für die Ära der Agenten entwickelt wurde. Diese Umstrukturierung prägte den gesamten Prozess – v
Pentium 4 Revival: Ein 20 Jahre alter Prozessor läuft das Meta Llama 3 Large Model
Kürzlich führte der YouTube-Technikkanal Fully Buffered ein beeindruckendes und anspruchsvolles Experiment durch: Es gelang, Metas neuestes großes Modell Llama 3.2 3B erfolgreich auf dem Pentium 4 641-Prozessor zu betreiben – einem Chip, der im Jahr
Der Bezirk Shangcheng in Hangzhou führt die ersten „goldenen zehn Maßnahmen“ der audiovisuellen Industrie in Zhejiang unter der Schirmherrschaft von AIGC durch und stellt dabei einen Industriefonds in Höhe von 5 Milliarden Yuan bereit.
Am 16. fand die AIGC Audio-Visual Industry Innovation Ecosystem Conference im Bezirk Shangcheng in Hangzhou statt. Während der Veranstaltung kündigte die Provinz ihre erste spezielle Politik für die AIGC-Audio-Visual-Branche an – „Die Goldenen Zehn“.
Empfehlungen zu verwandten Spezialthemen
Chatbot
 Erstelle deine eigene KI-Liebesgeschichte mit diesen Rollenspiel-Tools
Erstelle deine eigene KI-Liebesgeschichte mit diesen Rollenspiel-Tools
Entdecken Sie die besten KI-Tools für Rollenspiele des Jahres 2026, mit denen Sie fesselnde Geschichten erschaffen können. Die von XIX.AI zusammengestellte Liste umfasst leistungsstarke, bahnbrechende Assistenten, die kreatives Storytelling und emotionale Tiefe ermöglichen. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von Praxistests. Beginnen Sie noch heute Ihre ganz persönliche Reise.
 10 Tools
10 Tools
 xix.ai
Text-zu-Sprache
Die besten KI-Sprachtools für Indie-Spieleentwickler: Sparen Sie Zeit bei der Sprachausgabe für RPGs und Visual Novels
xix.ai
Text-zu-Sprache
Die besten KI-Sprachtools für Indie-Spieleentwickler: Sparen Sie Zeit bei der Sprachausgabe für RPGs und Visual Novels
Entdecken Sie die besten KI-Sprachtools für Spieleentwickler im Jahr 2026! Die von XIX.AI zusammengestellte Liste enthält erstklassige, bahnbrechende Lösungen, mit denen Sie bei der Sprachausgabe für RPGs und Visual Novels Zeit und Geld sparen. Entdecken Sie Vergleiche zwischen kostenlosen und kostenpflichtigen Angeboten, Praxistests und wöchentlich aktualisierte Rankings. Finden Sie noch heute Ihr perfektes Sprachtool!
10 Tools
xix.ai
Bildung und Lernen
Die besten AI-basierten Werkzeuge für geplantes Wiederholen: Optimieren Sie Ihr Lernplan für Medizinstudenten und Jurastudenten
Entdecken Sie die besten KI-basierten Wiederholungstools für das Jahr 2026, ausgewählt von XIX.AI. Unsere hochbewerteten, bahnbrechenden Tools helfen Medizinstudenten und Jurastudenten dabei, ihre Lernpläne so zu optimieren, dass das Gelernte optimal im Gedächtnis bleibt. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von tatsächlichen Tests sowie wöchentlich aktualisierten Rankings. Entfalten Sie jetzt Ihren Vorsprung beim Lernen.
10 Tools
xix.ai
Videoerstellung
Die besten KI-Plattformen für die Umwandlung von Text in Video zum Verfassen von Drehbüchern und für visuelles Storytelling
Die besten KI-Plattformen für die Umwandlung von Text in Video im Jahr 2026: Erstklassige Tools für das Verfassen von Drehbüchern und visuelles Storytelling. Entdecken Sie leistungsstarke, bahnbrechende Lösungen, mit denen Sie Ihren Text in fesselnde Videos verwandeln können. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand unserer wöchentlich aktualisierten Ranglisten und Praxistests. Finden Sie die perfekte Plattform, um Ihre Kreativität und Produktivität zu steigern. Entdecken Sie die sorgfältig zusammengestellte Auswahl bei XIX.AI.
10 Tools
xix.ai
Chatbot
KI-Multi-Agent-Orchestratoren: Gestaltung komplexer automatisierter Arbeitsabläufe mithilfe natürlicher Sprache
2026 Neuestes: Entdecken Sie die besten AI-Multi-Agenten-Orchestratoren, um mithilfe natürlicher Sprache komplexe automatisierte Arbeitsabläufe zu gestalten. Unsere sorgfältig ausgewählte Liste enthält hochbewertete, leistungsstarke Plattformen für reibungslose Aufgabenerstellung und intelligente Prozessverwaltung. Vergleichen Sie kostenlose und kostenpflichtige Optionen unter Berücksichtigung praktischer Erfahrungen. Nutzen Sie die wöchentlich aktualisierten Rankings von XIX.AI, um einen Vorsprung durch künstliche Intelligenz zu erlangen.
10 Tools
xix.ai
Bildbearbeitung
Die besten AI-Softwarelösungen zur Geräuschreduzierung: Beseitigen Sie Körnchen und Artefakte in Nachtaufnahmen bei schwachem Licht.
Entdecken Sie die besten KI-basierten Softwarelösungen zur Rauschreduzierung für Nachtfotografie in schwach beleuchteten Umgebungen im Jahr 2026. Unsere hochrangig bewertete, sorgfältig ausgewählte Liste vergleicht kostenlose und kostenpflichtige Tools und enthält Ergebnisse aus realen Tests sowie wöchentlich aktualisierte Ranglisten. Entfernen Sie mühelos Unreinheiten und Artefakte aus Ihren Bildern – eröffnen Sie mit XIX.AI den Vorteil der KI-Technologie für Ihre Fotografie.
10 Tools
xix.ai

 Kommentare (0)
Kommentare (0)
Ein UGV kann mithilfe von Vibrationssensoren unwegsames Gelände bewältigen. Quelle: ckybe, AI, via Adobe Stock
Vor einigen Jahren versuchten wir bei einem Feldtest, ein mittelgroßes unbemanntes Bodenfahrzeug (UGV) über eine scheinbar harmlose Stelle mit unebenem Boden zu fahren. Das Gelände war nicht extrem – nur ein paar lose Steine, etwas Staub und ein sanfter Hang. Es sah nach nichts Besorgniserregendem aus.
Auf halber Höhe hielt der Roboter an. Dann sackte ein Rad leicht ein, das Fahrgestell neigte sich nach vorne, und bevor jemand eingreifen konnte, kippte er um.
Das Seltsame daran? Die Kameraaufnahmen sahen normal aus. Auch der Lidar erkannte keine größeren Gefahren. Den Daten zufolge sollte der Weg „sicher“ sein.
Doch der Roboter spürte die Gefahr, bevor wir sie wahrnahmen. Er konnte dieses Gefühl nur nicht in eine Handlung umsetzen.
Diese Diskrepanz zwischen dem, was ein Roboter sieht, und dem, was er physisch erlebt, ist der Kern der Stabilität mobiler Roboter auf unebenem Boden.
In der realen Welt kann das Gelände trügerisch sein. Eine Oberfläche mag fest aussehen, sich aber unter Gewicht pulverig anfühlen. Steine können sich unter einer dünnen Erdschicht verbergen. Selbst flache Spurrillen können die Last so verlagern, dass ein UGV seinen Kipppunkt überschreitet. Und wenn das einmal passiert, verläuft die Wiederherstellung selten reibungslos.
Heutige Navigationssysteme sind nach wie vor weitgehend bildgesteuert. Kameras, Lidar und SLAM eignen sich hervorragend für die Kartierung. Aber sie können nicht sagen, wie der Boden reagieren wird, wenn man darüberfährt. Genau dort treten Fehler auf.
Die Schwingungsüberwachung bietet einen anderen Ansatz. Anstatt sich ausschließlich auf externe Wahrnehmung zu verlassen, beginnt der Roboter, auf seinen eigenen Körper zu hören. Jede Unebenheit, jeder Mikroschlupf und jeder Aufprall erzeugt Daten. Wenn man diese Signale ernst nimmt, werden sie vorausschauend.
Stellen Sie sich das wie eine Person vor, die auf losem Kies läuft. Man analysiert nicht jeden Schritt visuell. Man spürt ihn. Feine Verschiebungen unter den Füßen sagen einem, wann man langsamer werden, das Gleichgewicht anpassen oder die Richtung ändern muss.
Genau diese Art von Wahrnehmung wollen wir Robotern vermitteln.
Was nun folgt, ist keine theoretische Diskussion. Es basiert auf dem, was in der Praxis funktioniert: wie man Vibrationsdaten erfasst, was sie verraten und wie man sie nutzt, um den Roboter stabil zu halten, wenn der Untergrund unvorhersehbar wird.
Warum Schwingungssignale für die Stabilität entscheidend sind
Beginnen wir mit einer grundlegenden Frage, die Ingenieure oft stellen: Wie beeinflussen Vibrationen eigentlich die Stabilität?
Die kurze Antwort: Sie beeinflussen sie nicht nur – sie offenbaren sie.
Jedes Mal, wenn ein Rad mit dem Boden in Kontakt kommt, erzeugt es eine Kraft. Diese Kraft ist nicht konstant. Sie ändert sich je nachdem, ob die Oberfläche hart, weich, uneben oder instabil ist. Diese Schwankungen werden als Vibrationen durch den Roboter weitergeleitet.
Wenn man sie ignoriert, sind sie nur Rauschen. Wenn man sie analysiert, werden sie zu Erkenntnissen.
In einem Offroad-Test fuhren wir denselben Roboter über drei Oberflächen: festen Boden, losen Schotter und weichen Sand. Optisch sahen alle drei befahrbar aus. Doch ihre Schwingungsprofile waren völlig unterschiedlich.
Auf festem Boden war das Signal stabil – mit geringer Amplitude und gleichmäßig.
Auf Schotter wurde es chaotisch, mit scharfen Spitzen und hochfrequentem Rattern.
Auf Sand verlangsamte sich alles. Das Signal wurde schwerer, fast träge, mit spürbaren niederfrequenten Schwingungen. Dieser Unterschied ist entscheidend.
Hochfrequente Spitzen deuten typischerweise auf Stöße hin – das Auftreffen auf Steine, Trümmer oder harte Kanten. Diese Momente können die Lastverteilung plötzlich verschieben und Instabilität auslösen.
Niederfrequente Schwingungen sind subtiler, aber ebenso gefährlich. Sie signalisieren oft einen Verlust der Bodenhaftung, etwa wenn ein Rad einsinkt oder wegrutscht. Man spürt keinen plötzlichen Ruck; stattdessen schwindet die Stabilität allmählich.
Hier ist der entscheidende Punkt: Man spürt diese Effekte oft, bevor man sie sieht.
Wir sind bei den Rover-Tests darauf gestoßen. Ein Abschnitt des Geländes sah glatt aus, weil eine dünne Sandschicht die darin eingebetteten Felsen bedeckte. Kameras zeigten ebenen Boden. Lidar erkannte eine glatte Oberfläche.
Aber die IMU erzählte eine andere Geschichte. Sobald die Räder über die versteckten Felsen rollten, leuchtete das Vibrationssignal mit hochfrequenten Spitzen auf. Dies lieferte eine Frühwarnung – noch bevor der Roboter ins Wanken geriet.
Das ist die Stärke der Vibrationsmessung. Sie ist nicht von der Sichtbarkeit abhängig. Sie wird nicht durch Beleuchtung oder Staub beeinträchtigt. Sie spiegelt die tatsächlichen physikalischen Eigenschaften des Kontakts wider.
In anspruchsvollen Umgebungen ist das oft die einzige Wahrheit, die zählt.
Kernsensoren für die Schwingungsüberwachung
Wenn die Vibration das Signal ist, sind die Sensoren Ihre Ohren. Und wie bei jedem Sensorsystem sind Platzierung und Qualität wichtiger, als vielen bewusst ist.
Im Kern arbeiten Sie mit drei Komponenten: Beschleunigungssensoren, Gyroskope und Trägheitsmesseinheiten (IMUs).
Beschleunigungssensoren leisten die Hauptarbeit. Sie messen die lineare Beschleunigung entlang dreier Achsen und erfassen sowohl Stöße als auch kontinuierliche Schwingungen. Wenn ein Rad auf einen Stein trifft, erkennt der Beschleunigungssensor dies sofort. Wenn das Fahrgestell schwingt, wird dies ebenfalls angezeigt.
Gyroskope fügen eine weitere Ebene hinzu. Sie erfassen Winkelbewegungen – Roll-, Nick- und Gierbewegung. So lässt sich erkennen, ob der Roboter sich in einer Weise neigt oder dreht, die zum Umkippen führen könnte.
Kombiniert man beides, erhält man eine IMU. Die meisten modernen Systeme setzen auf IMUs, da sie ein vollständiges Bild der Bewegung liefern.
Die Praxis zeigt jedoch, dass die Platzierung der Sensoren genauso wichtig ist wie die Sensoren selbst.
Die Montage einer IMU am Massenschwerpunkt ist gängige Praxis, und das aus gutem Grund. Sie bietet eine stabile Referenz für die Gesamtbewegung. Wenn Sie jedoch nur diese verwenden, entgehen Ihnen entscheidende Details.
Auf unebenem Gelände spielt sich der Großteil der Bewegung an den Rädern ab. Wir haben bessere Ergebnisse erzielt, indem wir zusätzliche Beschleunigungssensoren näher an den Radbaugruppen angebracht haben. Diese erfassen lokale Stöße, die sich nicht vollständig bis zur Chassismitte ausbreiten.
Ein weiterer häufiger Fehler ist eine zu weiche Befestigung. Das mag unbedeutend erscheinen, ist aber von großer Bedeutung. Wenn sich Ihre Sensorhalterung auch nur geringfügig verbiegt, messen Sie nicht mehr die tatsächlichen Schwingungen – Sie messen eine gefilterte Version. Dies führt zu falschen Schlussfolgerungen.
Die Abtastrate ist ein weiterer praktischer Aspekt. Für die meisten mobilen Roboter reicht ein Bereich von 100 bis 500 Hz aus. Ist sie zu niedrig, verpassen Sie kritische Ereignisse. Ist sie zu hoch, verursachen Sie zusätzlichen Rechenaufwand ohne nennenswerten Nutzen.
Was die Hardware angeht, benötigen Sie keine ausgefallenen Komponenten. Viele zuverlässige Beschleunigungssensoren sind für raue Umgebungen geeignet, ohne das Budget zu sprengen. Kalibrierung und Konsistenz sind weitaus wichtiger.
Techniken zur Echtzeit-Vibrationsverarbeitung
Rohdaten von Vibrationen sind unübersichtlich. Wenn Sie diese jemals direkt von einer IMU grafisch dargestellt haben, wissen Sie, was ich meine – sie sehen aus wie Rauschen.
Der Trick besteht nicht darin, sie vollständig zu bereinigen, sondern gerade so weit, dass Muster erkennbar werden.
Der erste Schritt ist die Filterung. Motoren, Getriebe und sogar strukturelle Resonanzen verursachen eigene Schwingungen. Wenn man diese nicht berücksichtigt, übertönen sie die Geländesignale.
Wir beginnen in der Regel mit einem Bandpassfilter, um den Frequenzbereich zu isolieren, in dem die Interaktion mit dem Gelände stattfindet. Wenn dann eine bekannte Rauschquelle wie ein Motor vorliegt, der mit einer festen Frequenz dreht, wenden wir ein Notch-Filter an, um diese zu entfernen.
Ich habe Fälle gesehen, in denen ein einfacher Notch-Filter unbrauchbare Daten in klare Geländesignaturen verwandelt hat. Sobald das Signal brauchbar ist, geht man zur Analyse über.
Die Zeitbereichsanalyse zeigt, wie sich das Signal entwickelt. Aber erst bei der Frequenzbereichsanalyse wird es interessant. Mit Hilfe der FFT kann man genau sehen, wo sich die Energie konzentriert.
Verschiedene Geländearten hinterlassen unterschiedliche Fingerabdrücke. Kies verteilt die Energie über hohe Frequenzen. Gras liegt im mittleren Bereich. Sand verschiebt alles nach unten und dämpft es.
Daraus extrahiert man Merkmale. Nicht Dutzende – nur ein paar aussagekräftige. RMS-Amplitude, spektrale Leistung und vielleicht Varianz. Das reicht in der Regel aus.
Wir haben einmal einen einfachen Geländeklassifikator mit nur einer Handvoll dieser Merkmale erstellt und bei niedrigen Geschwindigkeiten eine Genauigkeit von fast 90 % erreicht. Nichts Ausgefallenes – kein Deep Learning. Nur saubere Daten und eine gute Merkmalsauswahl.
Die wichtigste Erkenntnis? Man braucht nicht immer komplexe Modelle. Man braucht gute Signale.
Verschiedene Methoden zum Anschluss eines dreiachsigen Schwingungssensors. Quelle: ATO
Stabilitätsvorhersage anhand von Schwingungsdaten
Hier wird es interessant. Die meisten Systeme reagieren erst auf Instabilität, nachdem sie bereits eingetreten ist. Dann steckt man schon in Schwierigkeiten. Mit Schwingungsüberwachung kann man von der Reaktion zur Vorhersage übergehen.
Traditionell verlassen sich Ingenieure auf Kennzahlen wie Stabilitätsreserven oder Kraftverteilungsmodelle. Diese funktionieren gut in kontrollierten Umgebungen, haben jedoch Schwierigkeiten, wenn sich das Geländeverhalten unvorhersehbar ändert.
Schwingungsdaten schließen diese Lücke. Anstatt Kräfte rein anhand von Modellen zu schätzen, leiten Sie diese aus der tatsächlichen Interaktion ab. Dadurch wird Ihre Stabilitätsbewertung realitätsnäher.
In letzter Zeit haben lernbasierte Ansätze in diesem Bereich an Bedeutung gewonnen. Man speist Beschleunigungs-, Winkelgeschwindigkeits- und Geschwindigkeitsdaten in ein Modell ein, und es gibt einen Stabilitätswert aus.
Beeindruckend ist, wie gut sich diese Modelle verallgemeinern lassen.
In einem Test haben wir ein Modell auf Gras, Kies und Erde trainiert. Anschließend haben wir es auf gemischtem Gelände eingesetzt, das es zuvor noch nie gesehen hatte. Es hat dennoch gut funktioniert – nicht perfekt, aber brauchbar.
In der Praxis ermöglicht dies Verhaltensweisen wie das Gating.
Wir hatten ein UGV mit einem kleinen Manipulatorarm. Wenn die Vibrationswerte einen Schwellenwert überschritten, stoppte das System automatisch die Armbewegung. Allein dadurch konnten mehrere Beinahe-Kipp-Unfälle verhindert werden.
Der entscheidende Punkt hierbei ist nicht das Modell selbst. Es geht darum, dass Stabilität zu etwas wird, das man kontinuierlich überwacht, und nicht zu etwas, das man erst im Nachhinein überprüft.
Regelungsstrategien für ein verbessertes Gleichgewicht
Sobald man seinen Schwingungsdaten vertraut, kann man sie für die Steuerung nutzen. Der einfachste Ansatz ist die Geschwindigkeitsanpassung – und er ist einer der effektivsten. Wenn die Schwingungen zunehmen, verlangsamen. Das ist alles.
Es klingt einfach, funktioniert aber, weil die meisten Instabilitätsprobleme mit der Geschwindigkeit zunehmen. Eine geringere Geschwindigkeit bedeutet geringere dynamische Kräfte, wodurch Ihr System mehr Zeit zum Reagieren hat.
Darüber hinaus können Sie Schwingungsdaten in Ihre Regelkreise einspeisen. PID-Regler können beispielsweise von einem zusätzlichen Eingang profitieren, der das Störungsniveau widerspiegelt. Dies hilft, Schwingungen zu reduzieren und die Reaktion zu verbessern.
Auch die Sensorfusion spielt eine Rolle. Vibrationsdaten allein sind aussagekräftig, aber in Kombination mit Odometrie oder visuellem Feedback werden sie noch zuverlässiger.
Eine praktische Verbesserung, die wir beobachteten, ergab sich aus der Beseitigung interner Störsignale. Durch das Herausfiltern mechanischer Schwingungen von internen Komponenten wurde das Steuerungssystem spürbar ruhiger – weniger Jitter, bessere Balance.
Manchmal resultieren Stabilitätsverbesserungen nicht aus einer Erhöhung der Komplexität. Sie entstehen durch die Beseitigung von Rauschen.
Herausforderungen bei der Implementierung und Lösungen
Natürlich ist nichts davon Plug-and-Play. Rauschen ist die größte Herausforderung. Nicht alle Schwingungen sind nützlich. Einige stammen von Motoren, andere von der Struktur, wieder andere aus der Umgebung. Das Ziel ist es, das Signal vom Rauschen zu trennen, ohne wichtige Informationen zu verlieren.
Ein kleiner IMU-Sensor für Roboter und Drohnen. Quelle: ATO
Sensordrift ist ein weiteres Problem, insbesondere bei Gyroskopen. Kleine Fehler summieren sich mit der Zeit. Hier kommen Sensorfusionstechniken wie Kalman-Filterung ins Spiel.
Dann ist da noch die Variabilität. Ändert man die Geschwindigkeit oder die Nutzlast des Roboters, ändert sich auch das Schwingungsprofil. Ist das System nicht darauf ausgelegt, sinkt die Leistung schnell.
Die einzige wirkliche Lösung ist das Testen – keine kontrollierten Labortests, sondern echtes Gelände, echte Bedingungen, echte Grenzfälle. Dort beweisen sich Systeme.
Roboter müssen den Boden spüren
Wenn es eine Erkenntnis gibt, dann diese: Roboter müssen den Boden spüren, nicht nur sehen.
Die Stabilität mobiler Roboter auf unebenem Gelände lässt sich nicht allein durch bessere Karten lösen. Sie erfordert eine tiefere Verbindung zwischen der Maschine und ihrer Umgebung.
Die Schwingungsüberwachung stellt diese Verbindung her. Sie wandelt Stöße, Rutschen und subtile Verschiebungen in verwertbare Daten um. Sie ermöglicht es Robotern, Probleme zu antizipieren, anstatt nur auf sie zu reagieren. In Umgebungen, in denen ein einziger Fehler eine Mission beenden kann, macht das den entscheidenden Unterschied.
Die Technologie ist nicht unerreichbar. Eine solide IMU-Konfiguration, durchdachte Verarbeitung und Feldtests können Sie schon weit bringen. Von da an geht es um Iteration.
Denn das Gelände wird Sie immer wieder überraschen. Das Ziel ist es, sicherzustellen, dass Ihr Roboter nicht lange überrascht ist.
Über den Autor
Faisal Mahmood ist ein erfahrener Stratege für digitales Marketing und Tech-Content mit umfassender Erfahrung in den Bereichen KI, Softwareentwicklung und SEO-optimierte Inhalte. Er ist spezialisiert auf die Erstellung fundierter, faktenbasierter Artikel, die Entwicklern, Unternehmen und Tech-Teams helfen, die neuesten Trends bei KI-gestützten Tools, Best Practices beim Programmieren und sicherer Softwareentwicklung zu verstehen.
Mahmood engagiert sich leidenschaftlich dafür, die Lücke zwischen neuen Technologien und praktischen Erkenntnissen für ein globales Publikum zu schließen. Er ist unter [email protected] erreichbar.










 Alibaba Tuhao M890 debütiert mit dreifacher Leistungsfähigkeit und markiert den Beginn der Ära der vollständig integrierten Agenten für das Chip-Cloud-Modell-Inferenz-Verfahren.
Am 20. Mai 2026 kündigte Alibaba Cloud auf dem Alibaba Cloud Summit die Fertigstellung eines umfassenden Upgrades des Technologiesystems an, das speziell für die Ära der Agenten entwickelt wurde. Diese Umstrukturierung prägte den gesamten Prozess – v
Alibaba Tuhao M890 debütiert mit dreifacher Leistungsfähigkeit und markiert den Beginn der Ära der vollständig integrierten Agenten für das Chip-Cloud-Modell-Inferenz-Verfahren.
Am 20. Mai 2026 kündigte Alibaba Cloud auf dem Alibaba Cloud Summit die Fertigstellung eines umfassenden Upgrades des Technologiesystems an, das speziell für die Ära der Agenten entwickelt wurde. Diese Umstrukturierung prägte den gesamten Prozess – v
 Pentium 4 Revival: Ein 20 Jahre alter Prozessor läuft das Meta Llama 3 Large Model
Kürzlich führte der YouTube-Technikkanal Fully Buffered ein beeindruckendes und anspruchsvolles Experiment durch: Es gelang, Metas neuestes großes Modell Llama 3.2 3B erfolgreich auf dem Pentium 4 641-Prozessor zu betreiben – einem Chip, der im Jahr
Pentium 4 Revival: Ein 20 Jahre alter Prozessor läuft das Meta Llama 3 Large Model
Kürzlich führte der YouTube-Technikkanal Fully Buffered ein beeindruckendes und anspruchsvolles Experiment durch: Es gelang, Metas neuestes großes Modell Llama 3.2 3B erfolgreich auf dem Pentium 4 641-Prozessor zu betreiben – einem Chip, der im Jahr
 Der Bezirk Shangcheng in Hangzhou führt die ersten „goldenen zehn Maßnahmen“ der audiovisuellen Industrie in Zhejiang unter der Schirmherrschaft von AIGC durch und stellt dabei einen Industriefonds in Höhe von 5 Milliarden Yuan bereit.
Am 16. fand die AIGC Audio-Visual Industry Innovation Ecosystem Conference im Bezirk Shangcheng in Hangzhou statt. Während der Veranstaltung kündigte die Provinz ihre erste spezielle Politik für die AIGC-Audio-Visual-Branche an – „Die Goldenen Zehn“.
Der Bezirk Shangcheng in Hangzhou führt die ersten „goldenen zehn Maßnahmen“ der audiovisuellen Industrie in Zhejiang unter der Schirmherrschaft von AIGC durch und stellt dabei einen Industriefonds in Höhe von 5 Milliarden Yuan bereit.
Am 16. fand die AIGC Audio-Visual Industry Innovation Ecosystem Conference im Bezirk Shangcheng in Hangzhou statt. Während der Veranstaltung kündigte die Provinz ihre erste spezielle Politik für die AIGC-Audio-Visual-Branche an – „Die Goldenen Zehn“.

Entdecken Sie die besten KI-Tools für Rollenspiele des Jahres 2026, mit denen Sie fesselnde Geschichten erschaffen können. Die von XIX.AI zusammengestellte Liste umfasst leistungsstarke, bahnbrechende Assistenten, die kreatives Storytelling und emotionale Tiefe ermöglichen. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von Praxistests. Beginnen Sie noch heute Ihre ganz persönliche Reise.
10 Tools
xix.ai

Entdecken Sie die besten KI-Sprachtools für Spieleentwickler im Jahr 2026! Die von XIX.AI zusammengestellte Liste enthält erstklassige, bahnbrechende Lösungen, mit denen Sie bei der Sprachausgabe für RPGs und Visual Novels Zeit und Geld sparen. Entdecken Sie Vergleiche zwischen kostenlosen und kostenpflichtigen Angeboten, Praxistests und wöchentlich aktualisierte Rankings. Finden Sie noch heute Ihr perfektes Sprachtool!
10 Tools
xix.ai
Entdecken Sie die besten KI-basierten Wiederholungstools für das Jahr 2026, ausgewählt von XIX.AI. Unsere hochbewerteten, bahnbrechenden Tools helfen Medizinstudenten und Jurastudenten dabei, ihre Lernpläne so zu optimieren, dass das Gelernte optimal im Gedächtnis bleibt. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand von tatsächlichen Tests sowie wöchentlich aktualisierten Rankings. Entfalten Sie jetzt Ihren Vorsprung beim Lernen.
10 Tools
xix.ai

Die besten KI-Plattformen für die Umwandlung von Text in Video im Jahr 2026: Erstklassige Tools für das Verfassen von Drehbüchern und visuelles Storytelling. Entdecken Sie leistungsstarke, bahnbrechende Lösungen, mit denen Sie Ihren Text in fesselnde Videos verwandeln können. Vergleichen Sie kostenlose und kostenpflichtige Optionen anhand unserer wöchentlich aktualisierten Ranglisten und Praxistests. Finden Sie die perfekte Plattform, um Ihre Kreativität und Produktivität zu steigern. Entdecken Sie die sorgfältig zusammengestellte Auswahl bei XIX.AI.
10 Tools
xix.ai
2026 Neuestes: Entdecken Sie die besten AI-Multi-Agenten-Orchestratoren, um mithilfe natürlicher Sprache komplexe automatisierte Arbeitsabläufe zu gestalten. Unsere sorgfältig ausgewählte Liste enthält hochbewertete, leistungsstarke Plattformen für reibungslose Aufgabenerstellung und intelligente Prozessverwaltung. Vergleichen Sie kostenlose und kostenpflichtige Optionen unter Berücksichtigung praktischer Erfahrungen. Nutzen Sie die wöchentlich aktualisierten Rankings von XIX.AI, um einen Vorsprung durch künstliche Intelligenz zu erlangen.
10 Tools
xix.ai
Entdecken Sie die besten KI-basierten Softwarelösungen zur Rauschreduzierung für Nachtfotografie in schwach beleuchteten Umgebungen im Jahr 2026. Unsere hochrangig bewertete, sorgfältig ausgewählte Liste vergleicht kostenlose und kostenpflichtige Tools und enthält Ergebnisse aus realen Tests sowie wöchentlich aktualisierte Ranglisten. Entfernen Sie mühelos Unreinheiten und Artefakte aus Ihren Bildern – eröffnen Sie mit XIX.AI den Vorteil der KI-Technologie für Ihre Fotografie.
10 Tools
xix.ai













