
















 Maison
Maison
La surveillance des vibrations améliore la stabilité des robots mobiles sur un terrain accidenté

Un UGV peut se déplacer sur un terrain accidenté à l'aide de capteurs de vibrations. Source : ckybe, AI, via Adobe Stock
Il y a quelques années, lors d'un essai sur le terrain, nous avons demandé à un véhicule terrestre sans pilote (UGV) de taille moyenne de tenter de gravir une portion de terrain accidenté qui semblait inoffensive. Le terrain n'était pas extrême : juste quelques pierres instables, un peu de poussière et une pente douce. Cela ne semblait pas poser de problème.
À mi-chemin, le robot s'est arrêté. Puis une roue s'est légèrement enfoncée, le châssis s'est incliné vers l'avant et, avant que quiconque puisse intervenir, il s'est renversé.
Ce qui est étrange ? Les images de la caméra semblaient normales. Le lidar n'avait détecté aucun danger majeur non plus. D'après les données, le chemin était censé être « sûr ».
Pourtant, le robot a senti le danger avant nous. Il n'a simplement pas pu traduire cette intuition en action.
Ce décalage entre ce que voit un robot et ce qu’il ressent physiquement est au cœur de la stabilité des robots mobiles sur un sol irrégulier.
Dans le monde réel, le terrain peut être trompeur. Une surface peut paraître solide mais se révéler friable sous le poids. Des rochers peuvent se cacher sous une fine couche de terre. Même des ornières peu profondes peuvent redistribuer la charge suffisamment pour faire basculer un UGV au-delà de son point de basculement. Et une fois que cela se produit, la récupération est rarement sans heurts.
Les systèmes de navigation actuels reposent encore largement sur la vision. Les caméras, le lidar et le SLAM sont excellents pour la cartographie. Mais ils ne peuvent pas vous dire comment le sol va réagir lorsqu’on roule dessus. C’est là que les défaillances surviennent.
La surveillance des vibrations offre une approche différente. Au lieu de se fier uniquement à la perception externe, le robot commence à écouter son propre corps. Chaque bosse, micro-glissement et impact génère des données. Lorsque vous prenez ces signaux au sérieux, ils deviennent prédictifs.
Imaginez une personne marchant sur du gravier meuble. Vous n'analysez pas visuellement chaque pas. Vous le sentez. De subtils changements sous vos pieds vous indiquent quand ralentir, ajuster votre équilibre ou changer de direction.
C'est ce type de conscience que nous souhaitons donner aux robots.
Ce qui suit n'est pas une discussion théorique. Cela repose sur ce qui fonctionne dans la pratique : comment capturer les données de vibration, ce qu'elles révèlent et comment les utiliser pour maintenir la stabilité de votre robot lorsque le sol devient imprévisible.
Pourquoi les signaux de vibration sont-ils essentiels à la stabilité ?
Commençons par une question fondamentale que les ingénieurs se posent souvent : comment les vibrations influencent-elles réellement la stabilité ?
La réponse courte : elles ne se contentent pas de l'influencer, elles la révèlent.
Chaque fois qu'une roue interagit avec le sol, elle génère une force. Cette force n'est pas constante. Elle varie selon que la surface est dure, molle, inégale ou instable. Ces variations se propagent à travers le robot sous forme de vibrations.
Si vous les ignorez, ce ne sont que des bruits parasites. Si vous les analysez, elles deviennent des informations précieuses.
Lors d'un essai tout-terrain, nous avons fait rouler le même robot sur trois types de surfaces : de la terre compacte, du gravier meuble et du sable mou. Visuellement, les trois semblaient praticables. Mais leurs profils de vibrations étaient complètement différents.
Sur la terre compacte, le signal était stable : faible amplitude et constant.
Sur le gravier, il est devenu chaotique, avec des pics brusques et des vibrations à haute fréquence.
Sur le sable, tout a ralenti. Le signal est devenu plus lourd, presque lent, avec des oscillations à basse fréquence perceptibles. Cette distinction est cruciale.
Les pics à haute fréquence indiquent généralement des chocs — collision avec des rochers, des débris ou des arêtes vives. Ces moments peuvent modifier soudainement la répartition de la charge et déclencher une instabilité.
Les oscillations à basse fréquence sont plus subtiles mais tout aussi dangereuses. Elles signalent souvent une perte d'adhérence, comme une roue qui s'enfonce ou dérape. Vous ne ressentez pas de secousse soudaine ; au contraire, la stabilité s'érode progressivement.
Voici le point essentiel : on ressent souvent ces effets avant de les voir.
Nous avons constaté ce phénomène lors des essais du rover. Une partie du terrain semblait lisse car une fine couche de sable recouvrait des rochers enfouis. Les caméras montraient un sol plat. Le lidar détectait une surface propre.
Mais l'IMU racontait une autre histoire. Dès que les roues ont roulé sur les rochers cachés, le signal de vibration s'est illuminé de pics à haute fréquence. Cela a fourni un avertissement précoce, avant que le robot ne commence à se déstabiliser.
C'est là toute la puissance de la détection des vibrations. Elle ne dépend pas de la visibilité. Elle n'est pas affectée par l'éclairage ou la poussière. Elle reflète la physique réelle du contact.
Dans des environnements difficiles, c'est souvent la seule vérité qui compte.
Capteurs essentiels pour la surveillance des vibrations
Si les vibrations sont le signal, les capteurs sont vos oreilles. Et comme pour tout système de détection, leur emplacement et leur qualité importent plus que beaucoup ne le pensent.
Au cœur du système, vous travaillez avec trois composants : des accéléromètres, des gyroscopes et des unités de mesure inertielle (IMU).
Les accéléromètres font le gros du travail. Ils mesurent l'accélération linéaire selon trois axes, capturant à la fois les chocs et les vibrations continues. Si une roue heurte un rocher, l'accéléromètre le détecte instantanément. Si le châssis oscille, cela apparaît également.
Les gyroscopes ajoutent une autre dimension. Ils suivent les mouvements angulaires : roulis, tangage et lacet. Cela vous indique si le robot commence à s'incliner ou à tourner d'une manière susceptible de le faire basculer.
Combinez les deux, et vous obtenez une IMU. La plupart des systèmes modernes s'appuient sur des IMU car elles fournissent une image complète du mouvement.
Mais l'expérience pratique montre que l'emplacement des capteurs est tout aussi important que les capteurs eux-mêmes.
Monter une IMU au centre de gravité est une pratique courante, et pour cause. Elle fournit une référence stable pour le mouvement global. Cependant, si vous n'utilisez que cela, vous passerez à côté de détails cruciaux.
Sur un terrain accidenté, l'essentiel de l'action se passe au niveau des roues. Nous avons obtenu de meilleurs résultats en ajoutant des accéléromètres secondaires plus près des ensembles de roues. Ceux-ci captent les impacts localisés qui ne se propagent pas entièrement jusqu'au centre du châssis.
Une autre erreur courante est le montage souple. Cela peut sembler mineur, mais c'est significatif. Si le support de votre capteur fléchit ne serait-ce que légèrement, vous ne mesurez plus la vibration réelle, mais une version filtrée. Cela conduit à des conclusions erronées.
Le taux d'échantillonnage est un autre aspect pratique à prendre en compte. Pour la plupart des robots mobiles, une plage de 100 à 500 Hz est suffisante. Si ce taux est trop bas, vous passez à côté d'événements critiques. S'il est trop élevé, vous alourdissez la charge de traitement sans gain significatif.
En ce qui concerne le matériel, vous n'avez pas besoin de composants sophistiqués. De nombreux capteurs accélérométriques fiables peuvent résister à des environnements difficiles sans grever votre budget. L'étalonnage et la cohérence sont bien plus importants.
Techniques de traitement des vibrations en temps réel
Les données brutes de vibration sont désordonnées. Si vous les avez déjà représentées graphiquement directement à partir d'une IMU, vous voyez ce que je veux dire : cela ressemble à du bruit.
L'astuce ne consiste pas à les nettoyer complètement, mais juste assez pour révéler des schémas.
La première étape consiste à filtrer. Les moteurs, les boîtes de vitesses et même la résonance structurelle génèrent leurs propres vibrations. Si vous ne les traitez pas, elles masqueront les signaux du terrain.
Nous commençons généralement par un filtre passe-bande pour isoler la gamme de fréquences où se produit l'interaction avec le terrain. Ensuite, s'il existe une source de bruit connue, comme un moteur tournant à une fréquence fixe, nous appliquons un filtre coupe-bande pour la supprimer.
J'ai vu des cas où un simple filtre coupe-bande a transformé des données inutilisables en signatures de terrain claires. Une fois que le signal est utilisable, on passe à l'analyse.
L'analyse dans le domaine temporel montre comment le signal évolue. Mais c'est l'analyse dans le domaine fréquentiel qui rend les choses intéressantes. À l'aide de la FFT, on peut voir exactement où l'énergie est concentrée.
Chaque type de terrain laisse une empreinte distincte. Le gravier répartit l'énergie sur les hautes fréquences. L'herbe se situe dans les fréquences moyennes. Le sable déplace tout vers les basses fréquences et atténue le signal.
À partir de là, on extrait des caractéristiques. Pas des dizaines, juste quelques-unes qui ont du sens. L'amplitude RMS, la puissance spectrale et peut-être la variance. C'est généralement suffisant.
Nous avons un jour construit un simple classificateur de terrain en utilisant seulement une poignée de ces caractéristiques et avons atteint une précision de près de 90 % à basse vitesse. Rien d’extraordinaire — pas d’apprentissage profond. Juste des données propres et une bonne sélection de caractéristiques.
La leçon à retenir ? Vous n'avez pas toujours besoin de modèles complexes. Vous avez besoin de bons signaux.
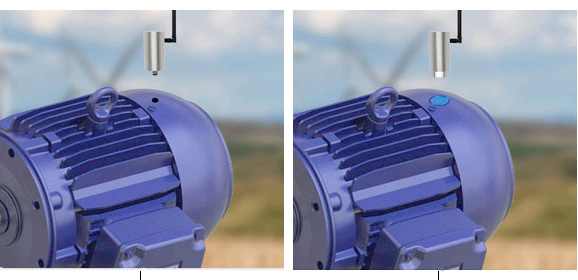
Différentes méthodes de connexion d'un capteur de vibrations à trois axes. Source : ATO
Prévision de la stabilité à partir des données de vibration
C'est là que les choses deviennent intéressantes. La plupart des systèmes réagissent à l'instabilité une fois qu'elle a commencé. À ce moment-là, vous êtes déjà en difficulté. La surveillance des vibrations vous permet de passer de la réaction à la prédiction.
Traditionnellement, les ingénieurs s'appuient sur des indicateurs tels que la marge de stabilité ou les modèles de répartition des forces. Ceux-ci fonctionnent bien dans des environnements contrôlés, mais peinent à s'adapter lorsque le comportement du terrain change de manière imprévisible.
Les données de vibration comblent cette lacune. Au lieu d'estimer les forces uniquement à partir de modèles, vous les déduisez de l'interaction réelle. Cela rend votre évaluation de la stabilité plus ancrée dans la réalité.
Récemment, les approches basées sur l'apprentissage ont gagné du terrain dans ce domaine. Il suffit d'introduire des données d'accélération, de vitesse angulaire et de vitesse dans un modèle pour qu'il génère un score de stabilité.
Ce qui est impressionnant, c'est la capacité de généralisation de ces modèles.
Lors d'un test, nous avons entraîné un modèle sur de l'herbe, du gravier et de la terre. Nous l'avons ensuite testé sur un terrain mixte qu'il n'avait jamais vu. Il a tout de même bien fonctionné — pas parfaitement, mais de manière utile.
Concrètement, cela permet des comportements tels que le gating.
Nous disposions d'un UGV équipé d'un petit bras manipulateur. Lorsque les niveaux de vibration dépassaient un seuil, le système interrompait automatiquement le mouvement du bras. Cela a suffi à éviter plusieurs incidents où le véhicule a failli se renverser.
L'idée importante ici n'est pas le modèle en soi. C'est que la stabilité devient quelque chose que l'on surveille en continu, et non quelque chose que l'on vérifie a posteriori.
Stratégies de contrôle pour un meilleur équilibre
Une fois que vous faites confiance à vos données de vibration, vous pouvez commencer à les utiliser pour le contrôle. L'approche la plus simple est l'adaptation de la vitesse — et c'est l'une des plus efficaces. Lorsque les vibrations augmentent, ralentissez. C'est tout.
Cela semble élémentaire, mais cela fonctionne car la plupart des problèmes d'instabilité sont proportionnels à la vitesse. Une vitesse plus faible signifie des forces dynamiques plus faibles, ce qui donne à votre système plus de temps pour réagir.
Au-delà de cela, vous pouvez intégrer les données de vibration dans vos boucles de contrôle. Les régulateurs PID, par exemple, peuvent tirer parti d'une entrée supplémentaire reflétant les niveaux de perturbation. Cela contribue à réduire les oscillations et à améliorer la réponse.
La fusion de capteurs joue également un rôle. Les données de vibration sont déjà très utiles, mais les combiner avec l'odométrie ou un retour visuel les rend encore plus fiables.
Une amélioration pratique que nous avons observée est venue du nettoyage du bruit interne. En filtrant les vibrations mécaniques des composants internes, le système de contrôle est devenu nettement plus fluide : moins de tremblements, un meilleur équilibre.
Parfois, les améliorations en matière de stabilité ne proviennent pas d'une complexité accrue. Elles proviennent de la suppression du bruit.
Défis de mise en œuvre et solutions
Bien sûr, rien de tout cela n'est « prêt à l'emploi ». Le bruit est le plus grand défi. Toutes les vibrations ne sont pas utiles. Certaines proviennent des moteurs, d'autres de la structure, d'autres encore de l'environnement. L'objectif est de séparer le signal du bruit sans perdre d'informations importantes.

Un petit capteur IMU pour robots et drones. Source : ATO
La dérive des capteurs est un autre problème, en particulier avec les gyroscopes. De petites erreurs s'accumulent au fil du temps. C'est là que les techniques de fusion de capteurs, comme le filtrage de Kalman, deviennent essentielles.
Il y a ensuite la variabilité. Modifiez la vitesse ou la charge utile du robot, et votre profil de vibrations change également. Si votre système n'est pas conçu pour gérer cela, les performances chutent rapidement.
La seule véritable solution réside dans les essais — non pas des essais contrôlés en laboratoire, mais sur le terrain, dans des conditions réelles, avec des cas limites réels. C'est là que les systèmes font leurs preuves.
Les robots doivent sentir le sol
S'il y a une chose à retenir, c'est celle-ci : les robots doivent sentir le sol, pas seulement le voir.
La stabilité des robots mobiles sur un terrain accidenté ne sera pas résolue par de meilleures cartes seules. Elle nécessite une connexion plus profonde entre la machine et son environnement.
La surveillance des vibrations fournit cette connexion. Elle transforme les chocs, les glissements et les déplacements subtils en données exploitables. Elle permet aux robots d'anticiper les problèmes au lieu de se contenter d'y réagir. Dans des environnements où une seule erreur peut mettre fin à une mission, cela fait toute la différence.
Cette technologie n'est pas hors de portée. Une configuration IMU solide, un traitement bien pensé et des essais sur le terrain peuvent vous mener loin. À partir de là, c'est une question d'itération.
Car le terrain vous surprendra toujours. L'objectif est de s'assurer que votre robot ne reste pas surpris longtemps.
 À propos de l'auteur
À propos de l'auteur
Faisal Mahmood est un stratège chevronné en marketing numérique et en contenu technologique, doté d'une vaste expérience dans l'IA, le développement logiciel et le contenu optimisé pour le référencement (SEO). Il est spécialisé dans la rédaction d'articles approfondis et factuels qui aident les développeurs, les entreprises et les équipes techniques à comprendre les dernières tendances en matière d'outils basés sur l'IA, les meilleures pratiques de codage et le développement logiciel sécurisé.
Mahmood se passionne pour le rapprochement entre les technologies émergentes et les connaissances pratiques destinées à un public international. Vous pouvez le contacter à l'adresse [email protected].
Article connexe
 Alibaba Tuhao M890 fait ses débuts avec des performances triplées, marquant l’avènement d’une ère d’agents full-stack pour les modèles d’inference basés sur le cloud et les puces.
Le 20 mai 2026, lors du sommet Alibaba Cloud, la société a annoncé l’achèvement d’une mise à niveau complet de son système technologique, conçu pour l’ère des agents intelligents. Cette transformation a réorganisé l’ensemble de la chaîne de traitemen
Pentium 4 Revival : Un processeur vieux de 20 ans permet d’exécuter le modèle Meta Llama 3 Large
Récemment, la chaîne technique YouTube Fully Buffered a mené une expérience impressionnante et poussée : elle a réussi à faire fonctionner le dernier modèle de grande taille de Meta, Llama 3.2 3B, sur un processeur Pentium 4 641, un circuit électroni
Le district de Shangcheng à Hangzhou lance les premières “Dix Mesures d’Or” audiovisuelles de Zhejiang dans le cadre du programme AIGC, avec la création d’un fonds industriel de 5 milliards de yuans.
Le 16ème, la Conférence sur l’écosystème d’innovation de l’industrie audiovisuelle AIGC s’est tenue dans le district de Shangcheng à Hangzhou. Lors de cet événement, la province a dévoilé sa première politique spécifique pour l’industrie audiovisuell
Recommandations de sujets spéciaux liés
chatbot
Alibaba Tuhao M890 fait ses débuts avec des performances triplées, marquant l’avènement d’une ère d’agents full-stack pour les modèles d’inference basés sur le cloud et les puces.
Le 20 mai 2026, lors du sommet Alibaba Cloud, la société a annoncé l’achèvement d’une mise à niveau complet de son système technologique, conçu pour l’ère des agents intelligents. Cette transformation a réorganisé l’ensemble de la chaîne de traitemen
Pentium 4 Revival : Un processeur vieux de 20 ans permet d’exécuter le modèle Meta Llama 3 Large
Récemment, la chaîne technique YouTube Fully Buffered a mené une expérience impressionnante et poussée : elle a réussi à faire fonctionner le dernier modèle de grande taille de Meta, Llama 3.2 3B, sur un processeur Pentium 4 641, un circuit électroni
Le district de Shangcheng à Hangzhou lance les premières “Dix Mesures d’Or” audiovisuelles de Zhejiang dans le cadre du programme AIGC, avec la création d’un fonds industriel de 5 milliards de yuans.
Le 16ème, la Conférence sur l’écosystème d’innovation de l’industrie audiovisuelle AIGC s’est tenue dans le district de Shangcheng à Hangzhou. Lors de cet événement, la province a dévoilé sa première politique spécifique pour l’industrie audiovisuell
Recommandations de sujets spéciaux liés
chatbot
 Créez votre propre histoire d'amour grâce à l'IA avec ces outils de jeu de rôle
Créez votre propre histoire d'amour grâce à l'IA avec ces outils de jeu de rôle
Découvrez les meilleurs outils de jeu de rôle basés sur l'IA de 2026 pour créer des récits immersifs. La sélection de XIX.AI regroupe des assistants puissants et révolutionnaires qui vous permettront de donner libre cours à votre créativité narrative et d'apporter une profondeur émotionnelle à vos récits. Comparez les options gratuites et payantes grâce à des tests concrets. Lancez-vous dès aujourd'hui dans une aventure unique.
 10 outils
10 outils
 xix.ai
Synthèse vocale
Les meilleurs outils vocaux basés sur l'IA pour les développeurs de jeux indépendants : gagnez du temps sur le doublage de vos jeux de rôle et romans visuels
xix.ai
Synthèse vocale
Les meilleurs outils vocaux basés sur l'IA pour les développeurs de jeux indépendants : gagnez du temps sur le doublage de vos jeux de rôle et romans visuels
Découvrez les meilleurs outils vocaux basés sur l'IA pour les développeurs de jeux en 2026 ! La sélection de XIX.AI regroupe les solutions les mieux notées et les plus innovantes pour vous faire gagner du temps et de l'argent sur le doublage de vos jeux de rôle et romans visuels. Consultez nos comparatifs entre versions gratuites et payantes, nos tests en conditions réelles et nos classements mis à jour chaque semaine. Trouvez dès aujourd'hui l'outil vocal qui vous convient le mieux !
10 outils
xix.ai
Éducation et apprentissage
Meilleurs outils d'entraînement par répétition espacée avec intelligence artificielle : optimisez vos programmes d'études pour les étudiants en médecine et en droit
Découvrez les meilleurs outils d’entraînement par répétition espacée en AI pour 2026, sélectionnés par XIX.AI. Nos choix phares, révolutionnaires dans leur domaine, aident les étudiants en médecine et en droit à optimiser leurs programmes de révision afin d’améliorer leur mémorisation. Comparez les options gratuites et payantes grâce à des tests concrets et aux classements mis à jour chaque semaine. Développez rapidement un avantage dans votre apprentissage.
10 outils
xix.ai
Création vidéo
Les meilleures plateformes d'IA de conversion de texte en vidéo pour la rédaction de scénarios et la narration visuelle
Les meilleures plateformes d'IA de conversion de texte en vidéo en 2026 : les outils les mieux notés pour la rédaction de scénarios et la narration visuelle. Découvrez des solutions puissantes et révolutionnaires pour transformer votre texte en vidéos captivantes. Comparez les options gratuites et payantes grâce à nos classements mis à jour chaque semaine et à nos tests en conditions réelles. Trouvez la plateforme idéale pour booster votre créativité et votre productivité. Découvrez notre sélection soigneusement choisie sur XIX.AI.
10 outils
xix.ai
chatbot
Orchestrateurs multi-agents AI : Concevoir des flux de travail automatisés complexes à l'aide du langage naturel
Dernières informations de 2026 : Découvrez les meilleurs outils d’orchestration multi-agent basés sur l’intelligence artificielle pour concevoir des workflows automatisés complexes à l’aide du langage naturel. Notre sélection révèle des plateformes reconnues et puissantes, idéales pour une automation des tâches sans faille et une gestion intelligente des processus. Comparez les options gratuites et payantes en vous basant sur des données issues du monde réel. Optimisez vos performances grâce aux classements mis à jour chaque semaine par les experts de XIX.AI.
10 outils
xix.ai
Édition d'images
Meilleurs logiciels d'optimisation du bruit par intelligence artificielle : éliminez les grains et les artefacts des photos prises la nuit dans des conditions de faible luminosité.
Découvrez les meilleurs logiciels de réduction du bruit par intelligence artificielle en 2026 pour la photographie nocturne en faible luminosité. Notre liste sélectionnée compare les outils gratuits et payants, et inclut des tests pratiques ainsi que des classements mis à jour chaque semaine. Éliminez facilement les grains d'image et autres artefacts. Développez votre avantage grâce à l’intelligence artificielle sur XIX.AI.
10 outils
xix.ai

 commentaires (0)
commentaires (0)
Un UGV peut se déplacer sur un terrain accidenté à l'aide de capteurs de vibrations. Source : ckybe, AI, via Adobe Stock
Il y a quelques années, lors d'un essai sur le terrain, nous avons demandé à un véhicule terrestre sans pilote (UGV) de taille moyenne de tenter de gravir une portion de terrain accidenté qui semblait inoffensive. Le terrain n'était pas extrême : juste quelques pierres instables, un peu de poussière et une pente douce. Cela ne semblait pas poser de problème.
À mi-chemin, le robot s'est arrêté. Puis une roue s'est légèrement enfoncée, le châssis s'est incliné vers l'avant et, avant que quiconque puisse intervenir, il s'est renversé.
Ce qui est étrange ? Les images de la caméra semblaient normales. Le lidar n'avait détecté aucun danger majeur non plus. D'après les données, le chemin était censé être « sûr ».
Pourtant, le robot a senti le danger avant nous. Il n'a simplement pas pu traduire cette intuition en action.
Ce décalage entre ce que voit un robot et ce qu’il ressent physiquement est au cœur de la stabilité des robots mobiles sur un sol irrégulier.
Dans le monde réel, le terrain peut être trompeur. Une surface peut paraître solide mais se révéler friable sous le poids. Des rochers peuvent se cacher sous une fine couche de terre. Même des ornières peu profondes peuvent redistribuer la charge suffisamment pour faire basculer un UGV au-delà de son point de basculement. Et une fois que cela se produit, la récupération est rarement sans heurts.
Les systèmes de navigation actuels reposent encore largement sur la vision. Les caméras, le lidar et le SLAM sont excellents pour la cartographie. Mais ils ne peuvent pas vous dire comment le sol va réagir lorsqu’on roule dessus. C’est là que les défaillances surviennent.
La surveillance des vibrations offre une approche différente. Au lieu de se fier uniquement à la perception externe, le robot commence à écouter son propre corps. Chaque bosse, micro-glissement et impact génère des données. Lorsque vous prenez ces signaux au sérieux, ils deviennent prédictifs.
Imaginez une personne marchant sur du gravier meuble. Vous n'analysez pas visuellement chaque pas. Vous le sentez. De subtils changements sous vos pieds vous indiquent quand ralentir, ajuster votre équilibre ou changer de direction.
C'est ce type de conscience que nous souhaitons donner aux robots.
Ce qui suit n'est pas une discussion théorique. Cela repose sur ce qui fonctionne dans la pratique : comment capturer les données de vibration, ce qu'elles révèlent et comment les utiliser pour maintenir la stabilité de votre robot lorsque le sol devient imprévisible.
Pourquoi les signaux de vibration sont-ils essentiels à la stabilité ?
Commençons par une question fondamentale que les ingénieurs se posent souvent : comment les vibrations influencent-elles réellement la stabilité ?
La réponse courte : elles ne se contentent pas de l'influencer, elles la révèlent.
Chaque fois qu'une roue interagit avec le sol, elle génère une force. Cette force n'est pas constante. Elle varie selon que la surface est dure, molle, inégale ou instable. Ces variations se propagent à travers le robot sous forme de vibrations.
Si vous les ignorez, ce ne sont que des bruits parasites. Si vous les analysez, elles deviennent des informations précieuses.
Lors d'un essai tout-terrain, nous avons fait rouler le même robot sur trois types de surfaces : de la terre compacte, du gravier meuble et du sable mou. Visuellement, les trois semblaient praticables. Mais leurs profils de vibrations étaient complètement différents.
Sur la terre compacte, le signal était stable : faible amplitude et constant.
Sur le gravier, il est devenu chaotique, avec des pics brusques et des vibrations à haute fréquence.
Sur le sable, tout a ralenti. Le signal est devenu plus lourd, presque lent, avec des oscillations à basse fréquence perceptibles. Cette distinction est cruciale.
Les pics à haute fréquence indiquent généralement des chocs — collision avec des rochers, des débris ou des arêtes vives. Ces moments peuvent modifier soudainement la répartition de la charge et déclencher une instabilité.
Les oscillations à basse fréquence sont plus subtiles mais tout aussi dangereuses. Elles signalent souvent une perte d'adhérence, comme une roue qui s'enfonce ou dérape. Vous ne ressentez pas de secousse soudaine ; au contraire, la stabilité s'érode progressivement.
Voici le point essentiel : on ressent souvent ces effets avant de les voir.
Nous avons constaté ce phénomène lors des essais du rover. Une partie du terrain semblait lisse car une fine couche de sable recouvrait des rochers enfouis. Les caméras montraient un sol plat. Le lidar détectait une surface propre.
Mais l'IMU racontait une autre histoire. Dès que les roues ont roulé sur les rochers cachés, le signal de vibration s'est illuminé de pics à haute fréquence. Cela a fourni un avertissement précoce, avant que le robot ne commence à se déstabiliser.
C'est là toute la puissance de la détection des vibrations. Elle ne dépend pas de la visibilité. Elle n'est pas affectée par l'éclairage ou la poussière. Elle reflète la physique réelle du contact.
Dans des environnements difficiles, c'est souvent la seule vérité qui compte.
Capteurs essentiels pour la surveillance des vibrations
Si les vibrations sont le signal, les capteurs sont vos oreilles. Et comme pour tout système de détection, leur emplacement et leur qualité importent plus que beaucoup ne le pensent.
Au cœur du système, vous travaillez avec trois composants : des accéléromètres, des gyroscopes et des unités de mesure inertielle (IMU).
Les accéléromètres font le gros du travail. Ils mesurent l'accélération linéaire selon trois axes, capturant à la fois les chocs et les vibrations continues. Si une roue heurte un rocher, l'accéléromètre le détecte instantanément. Si le châssis oscille, cela apparaît également.
Les gyroscopes ajoutent une autre dimension. Ils suivent les mouvements angulaires : roulis, tangage et lacet. Cela vous indique si le robot commence à s'incliner ou à tourner d'une manière susceptible de le faire basculer.
Combinez les deux, et vous obtenez une IMU. La plupart des systèmes modernes s'appuient sur des IMU car elles fournissent une image complète du mouvement.
Mais l'expérience pratique montre que l'emplacement des capteurs est tout aussi important que les capteurs eux-mêmes.
Monter une IMU au centre de gravité est une pratique courante, et pour cause. Elle fournit une référence stable pour le mouvement global. Cependant, si vous n'utilisez que cela, vous passerez à côté de détails cruciaux.
Sur un terrain accidenté, l'essentiel de l'action se passe au niveau des roues. Nous avons obtenu de meilleurs résultats en ajoutant des accéléromètres secondaires plus près des ensembles de roues. Ceux-ci captent les impacts localisés qui ne se propagent pas entièrement jusqu'au centre du châssis.
Une autre erreur courante est le montage souple. Cela peut sembler mineur, mais c'est significatif. Si le support de votre capteur fléchit ne serait-ce que légèrement, vous ne mesurez plus la vibration réelle, mais une version filtrée. Cela conduit à des conclusions erronées.
Le taux d'échantillonnage est un autre aspect pratique à prendre en compte. Pour la plupart des robots mobiles, une plage de 100 à 500 Hz est suffisante. Si ce taux est trop bas, vous passez à côté d'événements critiques. S'il est trop élevé, vous alourdissez la charge de traitement sans gain significatif.
En ce qui concerne le matériel, vous n'avez pas besoin de composants sophistiqués. De nombreux capteurs accélérométriques fiables peuvent résister à des environnements difficiles sans grever votre budget. L'étalonnage et la cohérence sont bien plus importants.
Techniques de traitement des vibrations en temps réel
Les données brutes de vibration sont désordonnées. Si vous les avez déjà représentées graphiquement directement à partir d'une IMU, vous voyez ce que je veux dire : cela ressemble à du bruit.
L'astuce ne consiste pas à les nettoyer complètement, mais juste assez pour révéler des schémas.
La première étape consiste à filtrer. Les moteurs, les boîtes de vitesses et même la résonance structurelle génèrent leurs propres vibrations. Si vous ne les traitez pas, elles masqueront les signaux du terrain.
Nous commençons généralement par un filtre passe-bande pour isoler la gamme de fréquences où se produit l'interaction avec le terrain. Ensuite, s'il existe une source de bruit connue, comme un moteur tournant à une fréquence fixe, nous appliquons un filtre coupe-bande pour la supprimer.
J'ai vu des cas où un simple filtre coupe-bande a transformé des données inutilisables en signatures de terrain claires. Une fois que le signal est utilisable, on passe à l'analyse.
L'analyse dans le domaine temporel montre comment le signal évolue. Mais c'est l'analyse dans le domaine fréquentiel qui rend les choses intéressantes. À l'aide de la FFT, on peut voir exactement où l'énergie est concentrée.
Chaque type de terrain laisse une empreinte distincte. Le gravier répartit l'énergie sur les hautes fréquences. L'herbe se situe dans les fréquences moyennes. Le sable déplace tout vers les basses fréquences et atténue le signal.
À partir de là, on extrait des caractéristiques. Pas des dizaines, juste quelques-unes qui ont du sens. L'amplitude RMS, la puissance spectrale et peut-être la variance. C'est généralement suffisant.
Nous avons un jour construit un simple classificateur de terrain en utilisant seulement une poignée de ces caractéristiques et avons atteint une précision de près de 90 % à basse vitesse. Rien d’extraordinaire — pas d’apprentissage profond. Juste des données propres et une bonne sélection de caractéristiques.
La leçon à retenir ? Vous n'avez pas toujours besoin de modèles complexes. Vous avez besoin de bons signaux.
Différentes méthodes de connexion d'un capteur de vibrations à trois axes. Source : ATO
Prévision de la stabilité à partir des données de vibration
C'est là que les choses deviennent intéressantes. La plupart des systèmes réagissent à l'instabilité une fois qu'elle a commencé. À ce moment-là, vous êtes déjà en difficulté. La surveillance des vibrations vous permet de passer de la réaction à la prédiction.
Traditionnellement, les ingénieurs s'appuient sur des indicateurs tels que la marge de stabilité ou les modèles de répartition des forces. Ceux-ci fonctionnent bien dans des environnements contrôlés, mais peinent à s'adapter lorsque le comportement du terrain change de manière imprévisible.
Les données de vibration comblent cette lacune. Au lieu d'estimer les forces uniquement à partir de modèles, vous les déduisez de l'interaction réelle. Cela rend votre évaluation de la stabilité plus ancrée dans la réalité.
Récemment, les approches basées sur l'apprentissage ont gagné du terrain dans ce domaine. Il suffit d'introduire des données d'accélération, de vitesse angulaire et de vitesse dans un modèle pour qu'il génère un score de stabilité.
Ce qui est impressionnant, c'est la capacité de généralisation de ces modèles.
Lors d'un test, nous avons entraîné un modèle sur de l'herbe, du gravier et de la terre. Nous l'avons ensuite testé sur un terrain mixte qu'il n'avait jamais vu. Il a tout de même bien fonctionné — pas parfaitement, mais de manière utile.
Concrètement, cela permet des comportements tels que le gating.
Nous disposions d'un UGV équipé d'un petit bras manipulateur. Lorsque les niveaux de vibration dépassaient un seuil, le système interrompait automatiquement le mouvement du bras. Cela a suffi à éviter plusieurs incidents où le véhicule a failli se renverser.
L'idée importante ici n'est pas le modèle en soi. C'est que la stabilité devient quelque chose que l'on surveille en continu, et non quelque chose que l'on vérifie a posteriori.
Stratégies de contrôle pour un meilleur équilibre
Une fois que vous faites confiance à vos données de vibration, vous pouvez commencer à les utiliser pour le contrôle. L'approche la plus simple est l'adaptation de la vitesse — et c'est l'une des plus efficaces. Lorsque les vibrations augmentent, ralentissez. C'est tout.
Cela semble élémentaire, mais cela fonctionne car la plupart des problèmes d'instabilité sont proportionnels à la vitesse. Une vitesse plus faible signifie des forces dynamiques plus faibles, ce qui donne à votre système plus de temps pour réagir.
Au-delà de cela, vous pouvez intégrer les données de vibration dans vos boucles de contrôle. Les régulateurs PID, par exemple, peuvent tirer parti d'une entrée supplémentaire reflétant les niveaux de perturbation. Cela contribue à réduire les oscillations et à améliorer la réponse.
La fusion de capteurs joue également un rôle. Les données de vibration sont déjà très utiles, mais les combiner avec l'odométrie ou un retour visuel les rend encore plus fiables.
Une amélioration pratique que nous avons observée est venue du nettoyage du bruit interne. En filtrant les vibrations mécaniques des composants internes, le système de contrôle est devenu nettement plus fluide : moins de tremblements, un meilleur équilibre.
Parfois, les améliorations en matière de stabilité ne proviennent pas d'une complexité accrue. Elles proviennent de la suppression du bruit.
Défis de mise en œuvre et solutions
Bien sûr, rien de tout cela n'est « prêt à l'emploi ». Le bruit est le plus grand défi. Toutes les vibrations ne sont pas utiles. Certaines proviennent des moteurs, d'autres de la structure, d'autres encore de l'environnement. L'objectif est de séparer le signal du bruit sans perdre d'informations importantes.
Un petit capteur IMU pour robots et drones. Source : ATO
La dérive des capteurs est un autre problème, en particulier avec les gyroscopes. De petites erreurs s'accumulent au fil du temps. C'est là que les techniques de fusion de capteurs, comme le filtrage de Kalman, deviennent essentielles.
Il y a ensuite la variabilité. Modifiez la vitesse ou la charge utile du robot, et votre profil de vibrations change également. Si votre système n'est pas conçu pour gérer cela, les performances chutent rapidement.
La seule véritable solution réside dans les essais — non pas des essais contrôlés en laboratoire, mais sur le terrain, dans des conditions réelles, avec des cas limites réels. C'est là que les systèmes font leurs preuves.
Les robots doivent sentir le sol
S'il y a une chose à retenir, c'est celle-ci : les robots doivent sentir le sol, pas seulement le voir.
La stabilité des robots mobiles sur un terrain accidenté ne sera pas résolue par de meilleures cartes seules. Elle nécessite une connexion plus profonde entre la machine et son environnement.
La surveillance des vibrations fournit cette connexion. Elle transforme les chocs, les glissements et les déplacements subtils en données exploitables. Elle permet aux robots d'anticiper les problèmes au lieu de se contenter d'y réagir. Dans des environnements où une seule erreur peut mettre fin à une mission, cela fait toute la différence.
Cette technologie n'est pas hors de portée. Une configuration IMU solide, un traitement bien pensé et des essais sur le terrain peuvent vous mener loin. À partir de là, c'est une question d'itération.
Car le terrain vous surprendra toujours. L'objectif est de s'assurer que votre robot ne reste pas surpris longtemps.
À propos de l'auteur
Faisal Mahmood est un stratège chevronné en marketing numérique et en contenu technologique, doté d'une vaste expérience dans l'IA, le développement logiciel et le contenu optimisé pour le référencement (SEO). Il est spécialisé dans la rédaction d'articles approfondis et factuels qui aident les développeurs, les entreprises et les équipes techniques à comprendre les dernières tendances en matière d'outils basés sur l'IA, les meilleures pratiques de codage et le développement logiciel sécurisé.
Mahmood se passionne pour le rapprochement entre les technologies émergentes et les connaissances pratiques destinées à un public international. Vous pouvez le contacter à l'adresse [email protected].










 Alibaba Tuhao M890 fait ses débuts avec des performances triplées, marquant l’avènement d’une ère d’agents full-stack pour les modèles d’inference basés sur le cloud et les puces.
Le 20 mai 2026, lors du sommet Alibaba Cloud, la société a annoncé l’achèvement d’une mise à niveau complet de son système technologique, conçu pour l’ère des agents intelligents. Cette transformation a réorganisé l’ensemble de la chaîne de traitemen
Alibaba Tuhao M890 fait ses débuts avec des performances triplées, marquant l’avènement d’une ère d’agents full-stack pour les modèles d’inference basés sur le cloud et les puces.
Le 20 mai 2026, lors du sommet Alibaba Cloud, la société a annoncé l’achèvement d’une mise à niveau complet de son système technologique, conçu pour l’ère des agents intelligents. Cette transformation a réorganisé l’ensemble de la chaîne de traitemen
 Pentium 4 Revival : Un processeur vieux de 20 ans permet d’exécuter le modèle Meta Llama 3 Large
Récemment, la chaîne technique YouTube Fully Buffered a mené une expérience impressionnante et poussée : elle a réussi à faire fonctionner le dernier modèle de grande taille de Meta, Llama 3.2 3B, sur un processeur Pentium 4 641, un circuit électroni
Pentium 4 Revival : Un processeur vieux de 20 ans permet d’exécuter le modèle Meta Llama 3 Large
Récemment, la chaîne technique YouTube Fully Buffered a mené une expérience impressionnante et poussée : elle a réussi à faire fonctionner le dernier modèle de grande taille de Meta, Llama 3.2 3B, sur un processeur Pentium 4 641, un circuit électroni
 Le district de Shangcheng à Hangzhou lance les premières “Dix Mesures d’Or” audiovisuelles de Zhejiang dans le cadre du programme AIGC, avec la création d’un fonds industriel de 5 milliards de yuans.
Le 16ème, la Conférence sur l’écosystème d’innovation de l’industrie audiovisuelle AIGC s’est tenue dans le district de Shangcheng à Hangzhou. Lors de cet événement, la province a dévoilé sa première politique spécifique pour l’industrie audiovisuell
Le district de Shangcheng à Hangzhou lance les premières “Dix Mesures d’Or” audiovisuelles de Zhejiang dans le cadre du programme AIGC, avec la création d’un fonds industriel de 5 milliards de yuans.
Le 16ème, la Conférence sur l’écosystème d’innovation de l’industrie audiovisuelle AIGC s’est tenue dans le district de Shangcheng à Hangzhou. Lors de cet événement, la province a dévoilé sa première politique spécifique pour l’industrie audiovisuell

Découvrez les meilleurs outils de jeu de rôle basés sur l'IA de 2026 pour créer des récits immersifs. La sélection de XIX.AI regroupe des assistants puissants et révolutionnaires qui vous permettront de donner libre cours à votre créativité narrative et d'apporter une profondeur émotionnelle à vos récits. Comparez les options gratuites et payantes grâce à des tests concrets. Lancez-vous dès aujourd'hui dans une aventure unique.
10 outils
xix.ai

Découvrez les meilleurs outils vocaux basés sur l'IA pour les développeurs de jeux en 2026 ! La sélection de XIX.AI regroupe les solutions les mieux notées et les plus innovantes pour vous faire gagner du temps et de l'argent sur le doublage de vos jeux de rôle et romans visuels. Consultez nos comparatifs entre versions gratuites et payantes, nos tests en conditions réelles et nos classements mis à jour chaque semaine. Trouvez dès aujourd'hui l'outil vocal qui vous convient le mieux !
10 outils
xix.ai
Découvrez les meilleurs outils d’entraînement par répétition espacée en AI pour 2026, sélectionnés par XIX.AI. Nos choix phares, révolutionnaires dans leur domaine, aident les étudiants en médecine et en droit à optimiser leurs programmes de révision afin d’améliorer leur mémorisation. Comparez les options gratuites et payantes grâce à des tests concrets et aux classements mis à jour chaque semaine. Développez rapidement un avantage dans votre apprentissage.
10 outils
xix.ai

Les meilleures plateformes d'IA de conversion de texte en vidéo en 2026 : les outils les mieux notés pour la rédaction de scénarios et la narration visuelle. Découvrez des solutions puissantes et révolutionnaires pour transformer votre texte en vidéos captivantes. Comparez les options gratuites et payantes grâce à nos classements mis à jour chaque semaine et à nos tests en conditions réelles. Trouvez la plateforme idéale pour booster votre créativité et votre productivité. Découvrez notre sélection soigneusement choisie sur XIX.AI.
10 outils
xix.ai
Dernières informations de 2026 : Découvrez les meilleurs outils d’orchestration multi-agent basés sur l’intelligence artificielle pour concevoir des workflows automatisés complexes à l’aide du langage naturel. Notre sélection révèle des plateformes reconnues et puissantes, idéales pour une automation des tâches sans faille et une gestion intelligente des processus. Comparez les options gratuites et payantes en vous basant sur des données issues du monde réel. Optimisez vos performances grâce aux classements mis à jour chaque semaine par les experts de XIX.AI.
10 outils
xix.ai
Découvrez les meilleurs logiciels de réduction du bruit par intelligence artificielle en 2026 pour la photographie nocturne en faible luminosité. Notre liste sélectionnée compare les outils gratuits et payants, et inclut des tests pratiques ainsi que des classements mis à jour chaque semaine. Éliminez facilement les grains d'image et autres artefacts. Développez votre avantage grâce à l’intelligence artificielle sur XIX.AI.
10 outils
xix.ai













