
















 Дом
ДомМониторинг вибрации повышает устойчивость мобильного робота на неровной местности

Беспилотный наземный аппарат (UGV) может передвигаться по пересеченной местности с помощью датчиков вибрации. Источник: ckybe, AI, через Adobe Stock
Несколько лет назад во время полевых испытаний мы наблюдали, как беспилотный наземный аппарат (UGV) среднего размера пытался преодолеть, казалось бы, безобидный участок неровной местности. Рельеф не был экстремальным — всего лишь несколько рыхлых камней, немного пыли и пологий склон. Казалось, что беспокоиться не о чем.
На полпути робот остановился. Затем одно колесо слегка просело, шасси наклонилось вперед, и, прежде чем кто-либо успел вмешаться, он опрокинулся.
Что странного? Изображение с камеры выглядело нормально. Лидар тоже не обнаружил никаких серьезных опасностей. Согласно данным, путь должен был быть «безопасным».
Тем не менее, робот почувствовал опасность раньше нас. Просто он не смог воплотить это ощущение в действие.
Это несоответствие между тем, что видит робот, и тем, что он физически ощущает, лежит в основе стабильности мобильных роботов на неровной поверхности.
В реальном мире рельеф может быть обманчивым. Поверхность может выглядеть твердой, но под весом становиться рыхлой. Камни могут скрываться под тонким слоем почвы. Даже неглубокие колеи могут перераспределить нагрузку настолько, что беспилотный наземный аппарат (UGV) перейдет точку опрокидывания. И как только это происходит, восстановление редко проходит гладко.
Современные навигационные системы по-прежнему в основном опираются на зрительное восприятие. Камеры, лидар и SLAM отлично подходят для картографирования. Но они не могут сказать, как поведет себя грунт при проезде. Именно здесь и происходят сбои.
Мониторинг вибрации предлагает другой подход. Вместо того чтобы полагаться исключительно на внешнее восприятие, робот начинает прислушиваться к своему собственному телу. Каждый ухаб, микроскольжение и удар генерируют данные. Когда вы серьезно относитесь к этим сигналам, они становятся предсказуемыми.
Представьте себе человека, идущего по сыпучему гравию. Вы не анализируете визуально каждый шаг. Вы его чувствуете. Незначительные сдвиги под ногами подсказывают вам, когда нужно замедлиться, скорректировать равновесие или изменить направление.
Именно такую осведомленность мы стремимся привить роботам.
То, что следует далее, — это не теоретическое обсуждение. Оно основано на том, что работает на практике: как собирать данные о вибрации, что они показывают и как использовать их для поддержания стабильности робота, когда поверхность становится непредсказуемой.
Почему сигналы вибрации имеют решающее значение для устойчивости
Начнем с фундаментального вопроса, который часто задают инженеры: как вибрации на самом деле влияют на устойчивость?
Краткий ответ: они не просто влияют на нее — они ее раскрывают.
Каждый раз, когда колесо взаимодействует с поверхностью, оно создает силу. Эта сила не постоянна. Она меняется в зависимости от того, твердая ли поверхность, мягкая, неровная или подвижная. Эти колебания передаются через робота в виде вибраций.
Если их игнорировать, это просто шум. Если их проанализировать, они становятся источником ценной информации.
В ходе одного из внедорожных испытаний мы провели одного и того же робота по трем типам поверхности: уплотненной грунтовой дороге, сыпучему гравию и мягкому песку. Визуально все три типа поверхности выглядели вполне проходимыми. Однако профили вибраций на них были совершенно разными.
На уплотненной грунтовой поверхности сигнал был стабильным — с низкой амплитудой и постоянным.
На гравии он стал хаотичным, с резкими всплесками и высокочастотным дребезжанием.
На песке все замедлилось. Сигнал стал тяжелее, почти вялым, с заметными низкочастотными колебаниями. Это различие имеет решающее значение.
Высокочастотные всплески обычно указывают на удары — о камни, мусор или твердые края. Эти моменты могут внезапно изменить распределение нагрузки и вызвать нестабильность.
Низкочастотные колебания менее заметны, но столь же опасны. Они часто сигнализируют о потере опоры, например, когда колесо проваливается или проскальзывает. Вы не ощущаете внезапного толчка; вместо этого стабильность постепенно снижается.
Вот в чем суть: часто эти эффекты ощущаются раньше, чем становятся видимыми.
Мы столкнулись с этим во время испытаний ровера. Участок местности выглядел ровным, потому что тонкий слой песка покрывал зарытые камни. Камеры показывали ровную поверхность. Лидар обнаружил чистую поверхность.
Но IMU показал совсем другое. Как только колеса перекатились по скрытым камням, сигнал вибрации загорелся высокочастотными всплесками. Это послужило ранним предупреждением — еще до того, как робот начал терять устойчивость.
В этом и заключается сила вибрационного датчика. Он не зависит от видимости. На него не влияют освещение или пыль. Он отражает реальные физические процессы при контакте.
В сложных условиях это часто единственная правда, которая имеет значение.
Основные датчики для мониторинга вибрации
Если вибрация — это сигнал, то датчики — это ваши уши. И, как и в любой системе датчиков, расположение и качество имеют большее значение, чем многие думают.
В основе лежат три компонента: акселерометры, гироскопы и инерциальные измерительные блоки (IMU).
Акселерометры выполняют основную работу. Они измеряют линейное ускорение по трем осям, фиксируя как удары, так и непрерывную вибрацию. Если колесо ударяется о камень, акселерометр мгновенно это обнаруживает. Если шасси колеблется, это тоже отображается.
Гироскопы добавляют еще один уровень. Они отслеживают угловое движение — крен, тангаж и рыскание. Это позволяет определить, начинает ли робот наклоняться или вращаться так, что это может привести к опрокидыванию.
Объедините эти два элемента, и вы получите IMU. Большинство современных систем полагаются на IMU, поскольку они дают полную картину движения.
Но практический опыт показывает, что расположение датчиков имеет такое же значение, как и сами датчики.
Установка IMU в центре масс является стандартной практикой, и на то есть веские причины. Она обеспечивает стабильную точку отсчета для общего движения. Однако, если вы используете только это, вы упустите важные детали.
На неровной местности большая часть движения происходит на колесах. Мы добились лучших результатов, добавив вторичные акселерометры ближе к колесным узлам. Они улавливают локальные удары, которые не полностью распространяются до центра шасси.
Еще одной распространенной ошибкой является мягкое крепление. Это может показаться мелочью, но имеет большое значение. Если крепление датчика даже слегка прогибается, вы измеряете не истинную вибрацию, а ее отфильтрованную версию. Это приводит к неверным выводам.
Частота дискретизации — еще один практический аспект. Для большинства мобильных роботов достаточно диапазона от 100 до 500 Гц. Слишком низкая частота — и вы пропустите критические события. Слишком высокая — и вы увеличите нагрузку на процессор без значимой выгоды.
Что касается оборудования, вам не нужны экзотические компоненты. Многие надежные акселерометры способны выдерживать суровые условия эксплуатации, не выходя за рамки бюджета. Калибровка и стабильность гораздо важнее.
Методы обработки вибрации в реальном времени
Необработанные данные о вибрации выглядят хаотично. Если вы когда-нибудь строили график непосредственно по данным IMU, вы понимаете, о чем я говорю — это похоже на шум.
Хитрость заключается не в том, чтобы очистить их полностью, а в том, чтобы очистить их настолько, чтобы выявить закономерности.
Первый шаг — фильтрация. Двигатели, редукторы и даже резонанс конструкции создают свои собственные вибрации. Если не устранить их, они заглушат сигналы от рельефа местности.
Обычно мы начинаем с полосового фильтра, чтобы выделить диапазон частот, в котором происходит взаимодействие с рельефом. Затем, если есть известный источник шума, например, двигатель, вращающийся с фиксированной частотой, мы применяем режекторный фильтр, чтобы его удалить.
Я видел случаи, когда простой режекторный фильтр превращал непригодные данные в четкие сигнатуры рельефа. Как только сигнал становится пригодным, можно переходить к анализу.
Анализ во временной области показывает, как развивается сигнал. Но анализ в частотной области — вот где все становится интересным. Используя БПФ, можно точно увидеть, где сосредоточена энергия.
Различные типы рельефа оставляют свои характерные отпечатки. Гравий распределяет энергию по высоким частотам. Трава находится в среднем диапазоне. Песок смещает все вниз и гасит сигнал.
Оттуда вы извлекаете признаки. Не десятки — всего несколько значимых. Среднеквадратичная амплитуда, спектральная мощность и, возможно, дисперсия. Обычно этого достаточно.
Однажды мы построили простой классификатор рельефа, используя всего несколько таких характеристик, и достигли точности почти 90% на низких скоростях. Ничего сложного — никакого глубокого обучения. Просто чистые данные и хороший выбор характеристик.
Главный урок? Не всегда нужны сложные модели. Нужны хорошие сигналы.
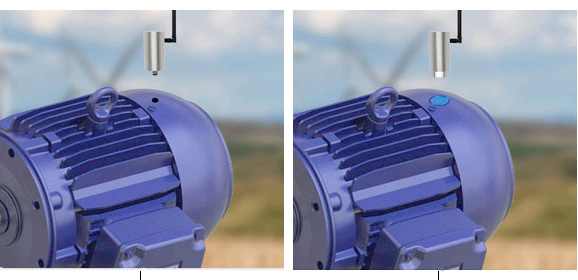
Различные способы подключения трехосного датчика вибрации. Источник: ATO
Прогнозирование устойчивости на основе данных о вибрации
Здесь дело становится интересным. Большинство систем реагируют на нестабильность уже после ее возникновения. К тому моменту вы уже в беде. Мониторинг вибрации позволяет перейти от реагирования к прогнозированию.
Традиционно инженеры полагаются на такие показатели, как запас устойчивости или модели распределения сил. Они хорошо работают в контролируемых условиях, но дают сбой, когда поведение рельефа меняется непредсказуемо.
Данные о вибрации заполняют этот пробел. Вместо того чтобы оценивать силы исключительно на основе моделей, вы выводите их из фактического взаимодействия. Это делает вашу оценку устойчивости более обоснованной.
В последнее время в этой области набирают популярность подходы, основанные на обучении. Введите данные об ускорении, угловой скорости и скорости в модель, и она выдаст оценку устойчивости.
Впечатляет то, насколько хорошо эти модели обобщают данные.
В одном из тестов мы обучили модель на траве, гравии и грунте. Затем мы запустили ее на смешанной местности, с которой она никогда не сталкивалась. Она по-прежнему работала хорошо — не идеально, но достаточно эффективно.
На практике это позволяет реализовывать такие функции, как блокировка.
У нас был беспилотный наземный аппарат (UGV) с небольшим манипулятором. Когда уровень вибрации превышал пороговое значение, система автоматически приостанавливала движение манипулятора. Одно это предотвратило несколько инцидентов, в которых аппарат едва не опрокинулся.
Важна здесь не сама модель. Важно то, что стабильность становится тем, что вы контролируете непрерывно, а не тем, что проверяете постфактум.
Стратегии управления для улучшения баланса
Как только вы доверяете своим данным о вибрации, вы можете начать использовать их в управлении. Самый простой подход — адаптация скорости — и он один из самых эффективных. Когда вибрация усиливается, замедлитесь. Вот и все.
Звучит просто, но это работает, потому что большинство проблем с нестабильностью зависит от скорости. Меньшая скорость означает меньшие динамические силы, что дает вашей системе больше времени на реакцию.
Кроме того, вы можете подавать данные о вибрации в контуры управления. Например, ПИД-регуляторы могут извлечь выгоду из дополнительного входа, отражающего уровни возмущений. Это помогает уменьшить колебания и улучшить отклик.
Свою роль играет и объединение данных с датчиков. Данные о вибрации сами по себе очень ценны, но их сочетание с одометрией или визуальной обратной связью делает их еще более надежными.
Одно из практических улучшений, которое мы наблюдали, было связано с устранением внутренних помех. Благодаря фильтрации механических вибраций от внутренних компонентов система управления стала заметно более плавной — меньше дрожания, лучший баланс.
Иногда улучшение стабильности достигается не за счет усложнения системы, а за счет устранения шума.
Проблемы внедрения и их решения
Конечно, ничего из этого не работает по принципу «подключи и работай». Шум — это самая большая проблема. Не все вибрации полезны. Некоторые исходят от двигателей, некоторые — от конструкции, а некоторые — от окружающей среды. Цель состоит в том, чтобы отделить сигнал от шума, не теряя важной информации.

Небольшой датчик IMU для роботов и дронов. Источник: ATO
Дрейф датчиков — еще одна проблема, особенно в случае с гироскопами. Небольшие погрешности накапливаются со временем. Именно здесь становятся необходимыми методы сенсорной фьюжн, такие как фильтрация Калмана.
Кроме того, существует проблема изменчивости. Измените скорость или грузоподъемность робота, и профиль вибрации тоже изменится. Если ваша система не рассчитана на это, производительность быстро снизится.
Единственное реальное решение — это тестирование, причем не контролируемое лабораторное тестирование, а тестирование на реальной местности, в реальных условиях и в реальных крайних случаях. Именно там системы показывают свою эффективность.
Роботы должны чувствовать поверхность
Если и есть один вывод, то он заключается в следующем: роботы должны чувствовать поверхность, а не просто видеть ее.
Проблема стабильности мобильных роботов на неровной местности не будет решена только с помощью более качественных карт. Требуется более глубокая связь между машиной и окружающей средой.
Мониторинг вибрации обеспечивает эту связь. Он преобразует удары, проскальзывания и едва заметные сдвиги в полезные данные. Это позволяет роботам предвидеть проблемы, а не просто реагировать на них. В условиях, где одна единственная ошибка может положить конец миссии, это имеет решающее значение.
Эта технология вполне доступна. Надежная установка IMU, продуманная обработка данных и полевые испытания могут значительно продвинуть вас вперед. Дальше — дело итераций.
Ведь местность всегда будет вас удивлять. Цель состоит в том, чтобы ваш робот не удивлялся слишком долго.
 Об авторе
Об авторе
Файсал Махмуд — опытный специалист по цифровому маркетингу и стратегии технологического контента с обширным опытом в области ИИ, разработки программного обеспечения и SEO-ориентированного контента. Он специализируется на создании тщательно проработанных, основанных на фактах статей, которые помогают разработчикам, предприятиям и техническим командам понять последние тенденции в области инструментов на базе ИИ, лучших практик кодирования и безопасной разработки программного обеспечения.
Махмуд с энтузиазмом занимается преодолением разрыва между новыми технологиями и практической информацией для глобальной аудитории. С ним можно связаться по адресу [email protected].
Связанная статья
 Основные моменты документа SpaceX о публичном размещении акций: амбиции по расширению услуг спутникового Интернета и использованию искусственного интеллекта
В своем заявлении о регистрации типа S-1, представленном перед планируемым IPO, компания SpaceX представила ряд впечатляющих финансовых показателей, подчеркивающих ее прочные позиции в области аэрокосмической связи и искусственного интеллекта:Число
Alibaba Tuhao M890 дебютирует с тройной производительностью, открывая эпоху агентов полного спектра для моделей инференции на основе чипов, облачных технологий и моделирования.
20 мая 2026 года на саммите Alibaba Cloud компания объявила о завершении обновления полноценной технологической системы, разработанной для эры агентов. Это обновление кардинально изменило весь процесс работы системы — от базовых чипов и облачных плат
Возрождение Pentium 4: 20-летний процессор запускает большую модель Meta Llama 3
Недавно технический канал YouTube Fully Buffered провел впечатляющий и сложный эксперимент: им удалось успешно запустить последнюю большую модель Meta Llama 3.2 3B на процессоре Pentium 4 641, выпущенном в 2006 году.Этот тест заставил современные ис
Рекомендации по связанным специальным темам
Создание видео
Основные моменты документа SpaceX о публичном размещении акций: амбиции по расширению услуг спутникового Интернета и использованию искусственного интеллекта
В своем заявлении о регистрации типа S-1, представленном перед планируемым IPO, компания SpaceX представила ряд впечатляющих финансовых показателей, подчеркивающих ее прочные позиции в области аэрокосмической связи и искусственного интеллекта:Число
Alibaba Tuhao M890 дебютирует с тройной производительностью, открывая эпоху агентов полного спектра для моделей инференции на основе чипов, облачных технологий и моделирования.
20 мая 2026 года на саммите Alibaba Cloud компания объявила о завершении обновления полноценной технологической системы, разработанной для эры агентов. Это обновление кардинально изменило весь процесс работы системы — от базовых чипов и облачных плат
Возрождение Pentium 4: 20-летний процессор запускает большую модель Meta Llama 3
Недавно технический канал YouTube Fully Buffered провел впечатляющий и сложный эксперимент: им удалось успешно запустить последнюю большую модель Meta Llama 3.2 3B на процессоре Pentium 4 641, выпущенном в 2006 году.Этот тест заставил современные ис
Рекомендации по связанным специальным темам
Создание видео
 Лучшие программы для создания видео с ИИ для подкастеров: превращайте аудиозаписи в увлекательные видео с говорящей головой
Лучшие программы для создания видео с ИИ для подкастеров: превращайте аудиозаписи в увлекательные видео с говорящей головой
Откройте для себя лучшие инструменты для создания видео с ИИ для подкастеров 2026 года на сайте XIX.AI. В нашем тщательно отобранном списке лидеров представлены мощные инструменты, которые без труда превратят ваши аудиозаписи в увлекательные видеоролики с говорящей головой. Сравните бесплатные и платные варианты с помощью реальных тестов и еженедельно обновляемого рейтинга. Откройте для себя преимущества визуального повествования уже сейчас.
 10 инструментов
10 инструментов
 xix.ai
чат-бот
Создайте свою собственную любовную историю с ИИ с помощью этих инструментов для ролевых игр
xix.ai
чат-бот
Создайте свою собственную любовную историю с ИИ с помощью этих инструментов для ролевых игр
Откройте для себя 2026 лучших инструментов для ролевых игр на базе ИИ, которые помогут вам создавать захватывающие истории. В тщательно подобранном списке XIX.AI представлены мощные, революционные помощники, которые раскроют ваш творческий потенциал в повествовании и придадут ему эмоциональную глубину. Сравните бесплатные и платные варианты на основе реальных тестов. Начните свое уникальное путешествие уже сегодня.
10 инструментов
xix.ai
Преобразование текста в речь
Лучшие инструменты искусственного интеллекта для независимых разработчиков игр: как сэкономить время на озвучке для RPG и визуальных новелл
Откройте для себя лучшие инструменты искусственного интеллекта для озвучивания в 2026 году, предназначенные для разработчиков игр! В тщательно составленном списке XIX.AI представлены самые популярные и революционные решения, которые помогут вам сэкономить время и деньги на озвучивании ролевых игр и визуальных новелл. Ознакомьтесь с сравнением бесплатных и платных версий, результатами реальных тестов и еженедельно обновляемыми рейтингами. Найдите свой идеальный инструмент для озвучивания уже сегодня!
10 инструментов
xix.ai
Образование и обучение
Лучшие инструменты искусственного интеллекта для систематического повторения материала: оптимизация учебных планов студентов-медиков и юристов
Откройте для себя лучшие инструменты для повторения материала с использованием технологий искусственного интеллекта в 2026 году, подобранные компанией XIX.AI. Наши самые популярные и революционные инструменты помогут студентам-медикам и юристам оптимизировать расписание занятий для лучшего запоминания информации. Сравните бесплатные и платные варианты с использованием реальных примеров и еженедельно обновляемых рейтингов. Раскройте для себя все возможности эффективного обучения уже сегодня.
10 инструментов
xix.ai
Создание видео
Лучшие платформы для преобразования текста в видео с помощью ИИ для написания сценариев и визуального повествования
2026: лучшие платформы для преобразования текста в видео с помощью ИИ: самые популярные инструменты для написания сценариев и визуального повествования. Откройте для себя мощные, революционные решения, которые помогут превратить ваш текст в увлекательные видеоролики. Сравните бесплатные и платные варианты с помощью наших еженедельно обновляемых рейтингов и реальных тестов. Найдите идеальную платформу, которая поможет вам раскрыть свой творческий потенциал и повысить продуктивность. Ознакомьтесь с тщательно подобранной подборкой на сайте XIX.AI.
10 инструментов
xix.ai
чат-бот
АИ-оркестраторы множественных агентов: создание сложных автоматизированных рабочих процессов с использованием естественного языка
2026 Год: Откройте для себя лучшие инструменты на основе искусственного интеллекта, предназначенные для создания сложных автоматизированных рабочих процессов с использованием естественного языка. Наш отобранный список включает наиболее популярные и мощные платформы, обеспечивающие бесшовную автоматизацию задач и интеллектуальное управление процессами. Сравните бесплатные и платные варианты с примерами реального использования. Получите преимущества, предоставляемые технологиями искусственного интеллекта, благодаря еженедельно обновляемым рейтингам от XIX.AI.
10 инструментов
xix.ai

 Комментарии (0)
Комментарии (0)
Беспилотный наземный аппарат (UGV) может передвигаться по пересеченной местности с помощью датчиков вибрации. Источник: ckybe, AI, через Adobe Stock
Несколько лет назад во время полевых испытаний мы наблюдали, как беспилотный наземный аппарат (UGV) среднего размера пытался преодолеть, казалось бы, безобидный участок неровной местности. Рельеф не был экстремальным — всего лишь несколько рыхлых камней, немного пыли и пологий склон. Казалось, что беспокоиться не о чем.
На полпути робот остановился. Затем одно колесо слегка просело, шасси наклонилось вперед, и, прежде чем кто-либо успел вмешаться, он опрокинулся.
Что странного? Изображение с камеры выглядело нормально. Лидар тоже не обнаружил никаких серьезных опасностей. Согласно данным, путь должен был быть «безопасным».
Тем не менее, робот почувствовал опасность раньше нас. Просто он не смог воплотить это ощущение в действие.
Это несоответствие между тем, что видит робот, и тем, что он физически ощущает, лежит в основе стабильности мобильных роботов на неровной поверхности.
В реальном мире рельеф может быть обманчивым. Поверхность может выглядеть твердой, но под весом становиться рыхлой. Камни могут скрываться под тонким слоем почвы. Даже неглубокие колеи могут перераспределить нагрузку настолько, что беспилотный наземный аппарат (UGV) перейдет точку опрокидывания. И как только это происходит, восстановление редко проходит гладко.
Современные навигационные системы по-прежнему в основном опираются на зрительное восприятие. Камеры, лидар и SLAM отлично подходят для картографирования. Но они не могут сказать, как поведет себя грунт при проезде. Именно здесь и происходят сбои.
Мониторинг вибрации предлагает другой подход. Вместо того чтобы полагаться исключительно на внешнее восприятие, робот начинает прислушиваться к своему собственному телу. Каждый ухаб, микроскольжение и удар генерируют данные. Когда вы серьезно относитесь к этим сигналам, они становятся предсказуемыми.
Представьте себе человека, идущего по сыпучему гравию. Вы не анализируете визуально каждый шаг. Вы его чувствуете. Незначительные сдвиги под ногами подсказывают вам, когда нужно замедлиться, скорректировать равновесие или изменить направление.
Именно такую осведомленность мы стремимся привить роботам.
То, что следует далее, — это не теоретическое обсуждение. Оно основано на том, что работает на практике: как собирать данные о вибрации, что они показывают и как использовать их для поддержания стабильности робота, когда поверхность становится непредсказуемой.
Почему сигналы вибрации имеют решающее значение для устойчивости
Начнем с фундаментального вопроса, который часто задают инженеры: как вибрации на самом деле влияют на устойчивость?
Краткий ответ: они не просто влияют на нее — они ее раскрывают.
Каждый раз, когда колесо взаимодействует с поверхностью, оно создает силу. Эта сила не постоянна. Она меняется в зависимости от того, твердая ли поверхность, мягкая, неровная или подвижная. Эти колебания передаются через робота в виде вибраций.
Если их игнорировать, это просто шум. Если их проанализировать, они становятся источником ценной информации.
В ходе одного из внедорожных испытаний мы провели одного и того же робота по трем типам поверхности: уплотненной грунтовой дороге, сыпучему гравию и мягкому песку. Визуально все три типа поверхности выглядели вполне проходимыми. Однако профили вибраций на них были совершенно разными.
На уплотненной грунтовой поверхности сигнал был стабильным — с низкой амплитудой и постоянным.
На гравии он стал хаотичным, с резкими всплесками и высокочастотным дребезжанием.
На песке все замедлилось. Сигнал стал тяжелее, почти вялым, с заметными низкочастотными колебаниями. Это различие имеет решающее значение.
Высокочастотные всплески обычно указывают на удары — о камни, мусор или твердые края. Эти моменты могут внезапно изменить распределение нагрузки и вызвать нестабильность.
Низкочастотные колебания менее заметны, но столь же опасны. Они часто сигнализируют о потере опоры, например, когда колесо проваливается или проскальзывает. Вы не ощущаете внезапного толчка; вместо этого стабильность постепенно снижается.
Вот в чем суть: часто эти эффекты ощущаются раньше, чем становятся видимыми.
Мы столкнулись с этим во время испытаний ровера. Участок местности выглядел ровным, потому что тонкий слой песка покрывал зарытые камни. Камеры показывали ровную поверхность. Лидар обнаружил чистую поверхность.
Но IMU показал совсем другое. Как только колеса перекатились по скрытым камням, сигнал вибрации загорелся высокочастотными всплесками. Это послужило ранним предупреждением — еще до того, как робот начал терять устойчивость.
В этом и заключается сила вибрационного датчика. Он не зависит от видимости. На него не влияют освещение или пыль. Он отражает реальные физические процессы при контакте.
В сложных условиях это часто единственная правда, которая имеет значение.
Основные датчики для мониторинга вибрации
Если вибрация — это сигнал, то датчики — это ваши уши. И, как и в любой системе датчиков, расположение и качество имеют большее значение, чем многие думают.
В основе лежат три компонента: акселерометры, гироскопы и инерциальные измерительные блоки (IMU).
Акселерометры выполняют основную работу. Они измеряют линейное ускорение по трем осям, фиксируя как удары, так и непрерывную вибрацию. Если колесо ударяется о камень, акселерометр мгновенно это обнаруживает. Если шасси колеблется, это тоже отображается.
Гироскопы добавляют еще один уровень. Они отслеживают угловое движение — крен, тангаж и рыскание. Это позволяет определить, начинает ли робот наклоняться или вращаться так, что это может привести к опрокидыванию.
Объедините эти два элемента, и вы получите IMU. Большинство современных систем полагаются на IMU, поскольку они дают полную картину движения.
Но практический опыт показывает, что расположение датчиков имеет такое же значение, как и сами датчики.
Установка IMU в центре масс является стандартной практикой, и на то есть веские причины. Она обеспечивает стабильную точку отсчета для общего движения. Однако, если вы используете только это, вы упустите важные детали.
На неровной местности большая часть движения происходит на колесах. Мы добились лучших результатов, добавив вторичные акселерометры ближе к колесным узлам. Они улавливают локальные удары, которые не полностью распространяются до центра шасси.
Еще одной распространенной ошибкой является мягкое крепление. Это может показаться мелочью, но имеет большое значение. Если крепление датчика даже слегка прогибается, вы измеряете не истинную вибрацию, а ее отфильтрованную версию. Это приводит к неверным выводам.
Частота дискретизации — еще один практический аспект. Для большинства мобильных роботов достаточно диапазона от 100 до 500 Гц. Слишком низкая частота — и вы пропустите критические события. Слишком высокая — и вы увеличите нагрузку на процессор без значимой выгоды.
Что касается оборудования, вам не нужны экзотические компоненты. Многие надежные акселерометры способны выдерживать суровые условия эксплуатации, не выходя за рамки бюджета. Калибровка и стабильность гораздо важнее.
Методы обработки вибрации в реальном времени
Необработанные данные о вибрации выглядят хаотично. Если вы когда-нибудь строили график непосредственно по данным IMU, вы понимаете, о чем я говорю — это похоже на шум.
Хитрость заключается не в том, чтобы очистить их полностью, а в том, чтобы очистить их настолько, чтобы выявить закономерности.
Первый шаг — фильтрация. Двигатели, редукторы и даже резонанс конструкции создают свои собственные вибрации. Если не устранить их, они заглушат сигналы от рельефа местности.
Обычно мы начинаем с полосового фильтра, чтобы выделить диапазон частот, в котором происходит взаимодействие с рельефом. Затем, если есть известный источник шума, например, двигатель, вращающийся с фиксированной частотой, мы применяем режекторный фильтр, чтобы его удалить.
Я видел случаи, когда простой режекторный фильтр превращал непригодные данные в четкие сигнатуры рельефа. Как только сигнал становится пригодным, можно переходить к анализу.
Анализ во временной области показывает, как развивается сигнал. Но анализ в частотной области — вот где все становится интересным. Используя БПФ, можно точно увидеть, где сосредоточена энергия.
Различные типы рельефа оставляют свои характерные отпечатки. Гравий распределяет энергию по высоким частотам. Трава находится в среднем диапазоне. Песок смещает все вниз и гасит сигнал.
Оттуда вы извлекаете признаки. Не десятки — всего несколько значимых. Среднеквадратичная амплитуда, спектральная мощность и, возможно, дисперсия. Обычно этого достаточно.
Однажды мы построили простой классификатор рельефа, используя всего несколько таких характеристик, и достигли точности почти 90% на низких скоростях. Ничего сложного — никакого глубокого обучения. Просто чистые данные и хороший выбор характеристик.
Главный урок? Не всегда нужны сложные модели. Нужны хорошие сигналы.
Различные способы подключения трехосного датчика вибрации. Источник: ATO
Прогнозирование устойчивости на основе данных о вибрации
Здесь дело становится интересным. Большинство систем реагируют на нестабильность уже после ее возникновения. К тому моменту вы уже в беде. Мониторинг вибрации позволяет перейти от реагирования к прогнозированию.
Традиционно инженеры полагаются на такие показатели, как запас устойчивости или модели распределения сил. Они хорошо работают в контролируемых условиях, но дают сбой, когда поведение рельефа меняется непредсказуемо.
Данные о вибрации заполняют этот пробел. Вместо того чтобы оценивать силы исключительно на основе моделей, вы выводите их из фактического взаимодействия. Это делает вашу оценку устойчивости более обоснованной.
В последнее время в этой области набирают популярность подходы, основанные на обучении. Введите данные об ускорении, угловой скорости и скорости в модель, и она выдаст оценку устойчивости.
Впечатляет то, насколько хорошо эти модели обобщают данные.
В одном из тестов мы обучили модель на траве, гравии и грунте. Затем мы запустили ее на смешанной местности, с которой она никогда не сталкивалась. Она по-прежнему работала хорошо — не идеально, но достаточно эффективно.
На практике это позволяет реализовывать такие функции, как блокировка.
У нас был беспилотный наземный аппарат (UGV) с небольшим манипулятором. Когда уровень вибрации превышал пороговое значение, система автоматически приостанавливала движение манипулятора. Одно это предотвратило несколько инцидентов, в которых аппарат едва не опрокинулся.
Важна здесь не сама модель. Важно то, что стабильность становится тем, что вы контролируете непрерывно, а не тем, что проверяете постфактум.
Стратегии управления для улучшения баланса
Как только вы доверяете своим данным о вибрации, вы можете начать использовать их в управлении. Самый простой подход — адаптация скорости — и он один из самых эффективных. Когда вибрация усиливается, замедлитесь. Вот и все.
Звучит просто, но это работает, потому что большинство проблем с нестабильностью зависит от скорости. Меньшая скорость означает меньшие динамические силы, что дает вашей системе больше времени на реакцию.
Кроме того, вы можете подавать данные о вибрации в контуры управления. Например, ПИД-регуляторы могут извлечь выгоду из дополнительного входа, отражающего уровни возмущений. Это помогает уменьшить колебания и улучшить отклик.
Свою роль играет и объединение данных с датчиков. Данные о вибрации сами по себе очень ценны, но их сочетание с одометрией или визуальной обратной связью делает их еще более надежными.
Одно из практических улучшений, которое мы наблюдали, было связано с устранением внутренних помех. Благодаря фильтрации механических вибраций от внутренних компонентов система управления стала заметно более плавной — меньше дрожания, лучший баланс.
Иногда улучшение стабильности достигается не за счет усложнения системы, а за счет устранения шума.
Проблемы внедрения и их решения
Конечно, ничего из этого не работает по принципу «подключи и работай». Шум — это самая большая проблема. Не все вибрации полезны. Некоторые исходят от двигателей, некоторые — от конструкции, а некоторые — от окружающей среды. Цель состоит в том, чтобы отделить сигнал от шума, не теряя важной информации.
Небольшой датчик IMU для роботов и дронов. Источник: ATO
Дрейф датчиков — еще одна проблема, особенно в случае с гироскопами. Небольшие погрешности накапливаются со временем. Именно здесь становятся необходимыми методы сенсорной фьюжн, такие как фильтрация Калмана.
Кроме того, существует проблема изменчивости. Измените скорость или грузоподъемность робота, и профиль вибрации тоже изменится. Если ваша система не рассчитана на это, производительность быстро снизится.
Единственное реальное решение — это тестирование, причем не контролируемое лабораторное тестирование, а тестирование на реальной местности, в реальных условиях и в реальных крайних случаях. Именно там системы показывают свою эффективность.
Роботы должны чувствовать поверхность
Если и есть один вывод, то он заключается в следующем: роботы должны чувствовать поверхность, а не просто видеть ее.
Проблема стабильности мобильных роботов на неровной местности не будет решена только с помощью более качественных карт. Требуется более глубокая связь между машиной и окружающей средой.
Мониторинг вибрации обеспечивает эту связь. Он преобразует удары, проскальзывания и едва заметные сдвиги в полезные данные. Это позволяет роботам предвидеть проблемы, а не просто реагировать на них. В условиях, где одна единственная ошибка может положить конец миссии, это имеет решающее значение.
Эта технология вполне доступна. Надежная установка IMU, продуманная обработка данных и полевые испытания могут значительно продвинуть вас вперед. Дальше — дело итераций.
Ведь местность всегда будет вас удивлять. Цель состоит в том, чтобы ваш робот не удивлялся слишком долго.
Об авторе
Файсал Махмуд — опытный специалист по цифровому маркетингу и стратегии технологического контента с обширным опытом в области ИИ, разработки программного обеспечения и SEO-ориентированного контента. Он специализируется на создании тщательно проработанных, основанных на фактах статей, которые помогают разработчикам, предприятиям и техническим командам понять последние тенденции в области инструментов на базе ИИ, лучших практик кодирования и безопасной разработки программного обеспечения.
Махмуд с энтузиазмом занимается преодолением разрыва между новыми технологиями и практической информацией для глобальной аудитории. С ним можно связаться по адресу [email protected].










 Основные моменты документа SpaceX о публичном размещении акций: амбиции по расширению услуг спутникового Интернета и использованию искусственного интеллекта
В своем заявлении о регистрации типа S-1, представленном перед планируемым IPO, компания SpaceX представила ряд впечатляющих финансовых показателей, подчеркивающих ее прочные позиции в области аэрокосмической связи и искусственного интеллекта:Число
Основные моменты документа SpaceX о публичном размещении акций: амбиции по расширению услуг спутникового Интернета и использованию искусственного интеллекта
В своем заявлении о регистрации типа S-1, представленном перед планируемым IPO, компания SpaceX представила ряд впечатляющих финансовых показателей, подчеркивающих ее прочные позиции в области аэрокосмической связи и искусственного интеллекта:Число
 Alibaba Tuhao M890 дебютирует с тройной производительностью, открывая эпоху агентов полного спектра для моделей инференции на основе чипов, облачных технологий и моделирования.
20 мая 2026 года на саммите Alibaba Cloud компания объявила о завершении обновления полноценной технологической системы, разработанной для эры агентов. Это обновление кардинально изменило весь процесс работы системы — от базовых чипов и облачных плат
Alibaba Tuhao M890 дебютирует с тройной производительностью, открывая эпоху агентов полного спектра для моделей инференции на основе чипов, облачных технологий и моделирования.
20 мая 2026 года на саммите Alibaba Cloud компания объявила о завершении обновления полноценной технологической системы, разработанной для эры агентов. Это обновление кардинально изменило весь процесс работы системы — от базовых чипов и облачных плат
 Возрождение Pentium 4: 20-летний процессор запускает большую модель Meta Llama 3
Недавно технический канал YouTube Fully Buffered провел впечатляющий и сложный эксперимент: им удалось успешно запустить последнюю большую модель Meta Llama 3.2 3B на процессоре Pentium 4 641, выпущенном в 2006 году.Этот тест заставил современные ис
Возрождение Pentium 4: 20-летний процессор запускает большую модель Meta Llama 3
Недавно технический канал YouTube Fully Buffered провел впечатляющий и сложный эксперимент: им удалось успешно запустить последнюю большую модель Meta Llama 3.2 3B на процессоре Pentium 4 641, выпущенном в 2006 году.Этот тест заставил современные ис

Откройте для себя лучшие инструменты для создания видео с ИИ для подкастеров 2026 года на сайте XIX.AI. В нашем тщательно отобранном списке лидеров представлены мощные инструменты, которые без труда превратят ваши аудиозаписи в увлекательные видеоролики с говорящей головой. Сравните бесплатные и платные варианты с помощью реальных тестов и еженедельно обновляемого рейтинга. Откройте для себя преимущества визуального повествования уже сейчас.
10 инструментов
xix.ai

Откройте для себя 2026 лучших инструментов для ролевых игр на базе ИИ, которые помогут вам создавать захватывающие истории. В тщательно подобранном списке XIX.AI представлены мощные, революционные помощники, которые раскроют ваш творческий потенциал в повествовании и придадут ему эмоциональную глубину. Сравните бесплатные и платные варианты на основе реальных тестов. Начните свое уникальное путешествие уже сегодня.
10 инструментов
xix.ai

Откройте для себя лучшие инструменты искусственного интеллекта для озвучивания в 2026 году, предназначенные для разработчиков игр! В тщательно составленном списке XIX.AI представлены самые популярные и революционные решения, которые помогут вам сэкономить время и деньги на озвучивании ролевых игр и визуальных новелл. Ознакомьтесь с сравнением бесплатных и платных версий, результатами реальных тестов и еженедельно обновляемыми рейтингами. Найдите свой идеальный инструмент для озвучивания уже сегодня!
10 инструментов
xix.ai
Откройте для себя лучшие инструменты для повторения материала с использованием технологий искусственного интеллекта в 2026 году, подобранные компанией XIX.AI. Наши самые популярные и революционные инструменты помогут студентам-медикам и юристам оптимизировать расписание занятий для лучшего запоминания информации. Сравните бесплатные и платные варианты с использованием реальных примеров и еженедельно обновляемых рейтингов. Раскройте для себя все возможности эффективного обучения уже сегодня.
10 инструментов
xix.ai

2026: лучшие платформы для преобразования текста в видео с помощью ИИ: самые популярные инструменты для написания сценариев и визуального повествования. Откройте для себя мощные, революционные решения, которые помогут превратить ваш текст в увлекательные видеоролики. Сравните бесплатные и платные варианты с помощью наших еженедельно обновляемых рейтингов и реальных тестов. Найдите идеальную платформу, которая поможет вам раскрыть свой творческий потенциал и повысить продуктивность. Ознакомьтесь с тщательно подобранной подборкой на сайте XIX.AI.
10 инструментов
xix.ai
2026 Год: Откройте для себя лучшие инструменты на основе искусственного интеллекта, предназначенные для создания сложных автоматизированных рабочих процессов с использованием естественного языка. Наш отобранный список включает наиболее популярные и мощные платформы, обеспечивающие бесшовную автоматизацию задач и интеллектуальное управление процессами. Сравните бесплатные и платные варианты с примерами реального использования. Получите преимущества, предоставляемые технологиями искусственного интеллекта, благодаря еженедельно обновляемым рейтингам от XIX.AI.
10 инструментов
xix.ai













