
















 首頁
首頁全球首個事件層級的具身智能世界模型,終結了機器人的逐幀學習
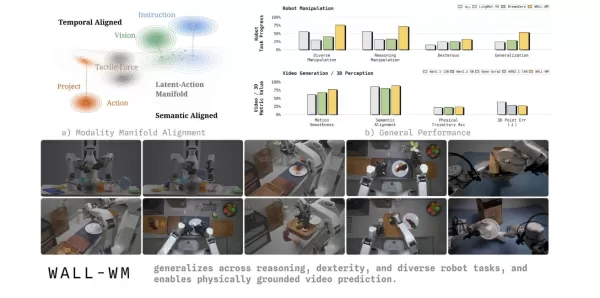
5月29日,Variable Robot團隊發表了WALL-WM,這是全球首個基於「事件層級預測」建構的具身智能世界模型。 該模型擺脫了傳統具身大型模型依時間逐幀學習動作的模式,轉而將世界模型的預測單元切換為語義事件。這標誌著機器人理解與執行任務方式邁入新階段。

在當前的具身智能領域,主流的視覺-語言-動作(VLA)模型通常會根據當前影像與指令,預測出固定長度的動作區塊。這種逐幀訓練的方法,往往導致機器人過度關注細微的肢體動作,卻忽略了動作的最終目標。 當面對更換杯子或桌子等情境時,機器人常因缺乏泛化能力而失敗。為解決此產業痛點,Variable 團隊在其學術論文中指出,文字、視覺與動作資訊在現實世界中,天然存在於不同的時間尺度與流形幾何結構中。 若強行將其置於單一共享空間中,極易破壞預訓練的幾何先驗。
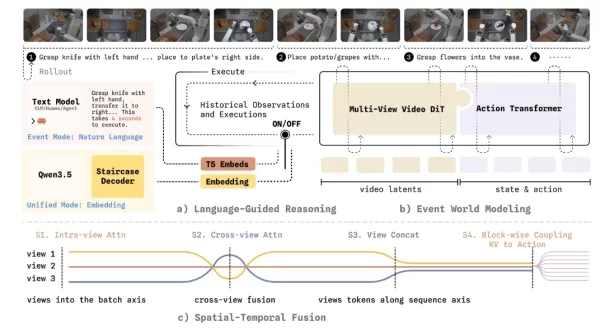
為解決此挑戰,WALL-WM 世界模型引入了一種創新的事件導向訓練與執行機制。它將複雜任務分解為語義清晰的事件節點,例如伸展、抓取和移動。 在運作上,該模型不再僵化地計算下一幀影像。取而代之的是,它會先模擬世界因下一個事件而產生的變化,然後將該視覺變化精確地轉換為機械手臂的運動軌跡。
為確保此新架構能可靠地部署於實體世界,Variable Robot 團隊進行了一系列徹底的工程改造。該系統支援在相同基礎權重上,靈活切換「事件模式」(具有可變長度的動作輸出)與「統一模式」(具有即時閉環控制)。 此外,該系統還實現了視訊模型與動作模型之間的一向耦合,防止來自網路影片的寶貴動態先驗資訊過早受到動作數據的偏誤。 針對多鏡頭的幾何感知,該模型引入了錐體遮罩與管狀遮罩,迫使人工智慧建立跨視角的真實三維幾何對應關係。為解決決策延遲問題,它採用了一種新的「階梯式思維鏈解碼」技術,在維持邏輯可解釋性的同時,顯著降低了解碼延遲。
相關文章
 Anthropic 的實驗性 AI「Claude」在電子商務測試中完成了談判與交易
隨著人工智慧的快速發展,Anthropic 上週五悄悄推出了一項名為「Project Deal」的內部實驗,展現了人工智慧在電子商務領域的潛力。該實驗讓其人工智慧模型 Claude 在封閉的市場環境中自主處理買賣及價格協商,並涉及真實的金融交易。實驗的核心是一個建構於 Slack 平台上的內部市場,Claude 在其中同時擔任買方與賣方的談判代表。它首先訪談了 69 名員工,以收集他們的買賣意圖及
DeepSeek Code 即將推出
隨著人工智慧技術的加速發展,DeepSeek 正處於一個令人振奮的轉捩點。這家人工智慧公司最近透露,已獲得超過 700 億元的資金。管理層強調,公司致力於突破性的人工智慧研究,而非追求眼前的商業利益。這一戰略轉向表明 DeepSeek 將全力投入新產品的開發,尤其是眾人矚目的 DeepSeek Code。DeepSeek Code 的規劃已逐漸成形,該公司職缺頁面已發布數個相關職位,例如「Agen
馬斯克的 Grok:1.5 兆個參數與游標程式碼吸收——是遊戲規則的改變者,還是虛張聲勢?
伊隆·馬斯克終於有所行動。在人工智慧程式設計的競賽中,OpenAI 和 Anthropic 正加速前進,而 xAI 似乎落後了。馬斯克曾多次表示其目標是與 Claude 抗衡,然而儘管 Grok4.X 系列已進行多次更新,成果在理論上看似不錯,但在實際應用中卻未能達標,兩者之間的差距幾乎未見縮小。不過,這次他握有一張新王牌。馬斯克在 X 平台上證實,Grok 的新版本即將問世。 這款基礎模型第九版
相關專題推薦
商業
Anthropic 的實驗性 AI「Claude」在電子商務測試中完成了談判與交易
隨著人工智慧的快速發展,Anthropic 上週五悄悄推出了一項名為「Project Deal」的內部實驗,展現了人工智慧在電子商務領域的潛力。該實驗讓其人工智慧模型 Claude 在封閉的市場環境中自主處理買賣及價格協商,並涉及真實的金融交易。實驗的核心是一個建構於 Slack 平台上的內部市場,Claude 在其中同時擔任買方與賣方的談判代表。它首先訪談了 69 名員工,以收集他們的買賣意圖及
DeepSeek Code 即將推出
隨著人工智慧技術的加速發展,DeepSeek 正處於一個令人振奮的轉捩點。這家人工智慧公司最近透露,已獲得超過 700 億元的資金。管理層強調,公司致力於突破性的人工智慧研究,而非追求眼前的商業利益。這一戰略轉向表明 DeepSeek 將全力投入新產品的開發,尤其是眾人矚目的 DeepSeek Code。DeepSeek Code 的規劃已逐漸成形,該公司職缺頁面已發布數個相關職位,例如「Agen
馬斯克的 Grok:1.5 兆個參數與游標程式碼吸收——是遊戲規則的改變者,還是虛張聲勢?
伊隆·馬斯克終於有所行動。在人工智慧程式設計的競賽中,OpenAI 和 Anthropic 正加速前進,而 xAI 似乎落後了。馬斯克曾多次表示其目標是與 Claude 抗衡,然而儘管 Grok4.X 系列已進行多次更新,成果在理論上看似不錯,但在實際應用中卻未能達標,兩者之間的差距幾乎未見縮小。不過,這次他握有一張新王牌。馬斯克在 X 平台上證實,Grok 的新版本即將問世。 這款基礎模型第九版
相關專題推薦
商業
 最佳 AI 招聘工具:篩選履歷與自動化安排候選人面試
最佳 AI 招聘工具:篩選履歷與自動化安排候選人面試
在 XIX.AI 探索 2026 年最新且評價最高的 AI 招聘工具。我們精心挑選的清單收錄了強大且具顛覆性的解決方案,可協助篩選履歷並自動化安排候選人面試。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即找到最適合您的招聘助手,並優化您的招聘流程!
 10 個工具
10 個工具
 xix.ai
生產率
AI 個人健康與專注力教練:管理倦怠感並提升精神能量
xix.ai
生產率
AI 個人健康與專注力教練:管理倦怠感並提升精神能量
立即在 XIX.AI 探索 2026 年最佳 AI 個人健康與專注力教練。我們精心策劃的排行榜收錄了備受好評、能帶來革命性改變的工具,助您管理倦怠感並提升精神能量。透過實際使用心得,比較免費與付費方案的差異。立即開啟通往巔峰生產力與身心健康的道路。
10 個工具
xix.ai
聊天機器人
最受好評的 AI 浪漫聊天機器人:透過一貫的個性建立長期關係
探索 2026 年最新、評價最高的 AI 浪漫聊天機器人,助您建立真摯且長久的連結。我們精心整理的清單包含功能強大且性格鮮明的聊天機器人、免費與付費版本的比較,以及實際測試結果。立即前往 XIX.AI 尋找您的完美伴侶,並開始建立這段關係吧。
10 個工具
xix.ai
教育與學習
最佳AI資料科學導師:精通SQL、Pandas及機器學習工作流程
探索2026年最優秀的人工智慧資料科學導師,幫助他們掌握SQL、Pandas以及機器學習工作流程。在XIX.AI上檢視我們精心挑選的頂級導師名單,獲得強大而具有變革性的指導。透過對比免費和付費選項,並結合實際應用案例進行了解,今天就開啟你的資料科學精通之路吧。
10 個工具
xix.ai
聊天機器人
最佳 AI 調情與對話訓練工具:即時提升社交魅力與自信
在 XIX.AI 探索 2026 年最頂尖的 AI 調情與對話訓練工具。我們精心挑選、評價最高的精選清單,能助您即時建立社交魅力與自信。探索這些必試且能徹底改變遊戲規則的工具,並透過免費與付費版本的比較,以及每週更新的排行榜,立即解鎖您的社交優勢。
10 個工具
xix.ai
代碼
最適合自動化單元測試的最佳AI工具:一鍵生成Jest、PyTest和JUnit測試用例
探索2026年最新評選出的頂級AI工具,這些工具專為自動化單元測試而設計。我們精心挑選了那些功能強大、能夠改變開發流程的工具,它們能夠幫助您快速生成Jest、PyTest和JUnit測試用例。在XIX.AI平臺上,您可以免費檢視各種選項,並透過實際測試結果以及每週更新的排名來了解它們的優劣。立即利用這些AI工具,提升您的開發效率吧!
10 個工具
xix.ai

 評論 (0)
0/500
評論 (0)
0/500
5月29日,Variable Robot團隊發表了WALL-WM,這是全球首個基於「事件層級預測」建構的具身智能世界模型。 該模型擺脫了傳統具身大型模型依時間逐幀學習動作的模式,轉而將世界模型的預測單元切換為語義事件。這標誌著機器人理解與執行任務方式邁入新階段。
在當前的具身智能領域,主流的視覺-語言-動作(VLA)模型通常會根據當前影像與指令,預測出固定長度的動作區塊。這種逐幀訓練的方法,往往導致機器人過度關注細微的肢體動作,卻忽略了動作的最終目標。 當面對更換杯子或桌子等情境時,機器人常因缺乏泛化能力而失敗。為解決此產業痛點,Variable 團隊在其學術論文中指出,文字、視覺與動作資訊在現實世界中,天然存在於不同的時間尺度與流形幾何結構中。 若強行將其置於單一共享空間中,極易破壞預訓練的幾何先驗。
為解決此挑戰,WALL-WM 世界模型引入了一種創新的事件導向訓練與執行機制。它將複雜任務分解為語義清晰的事件節點,例如伸展、抓取和移動。 在運作上,該模型不再僵化地計算下一幀影像。取而代之的是,它會先模擬世界因下一個事件而產生的變化,然後將該視覺變化精確地轉換為機械手臂的運動軌跡。
為確保此新架構能可靠地部署於實體世界,Variable Robot 團隊進行了一系列徹底的工程改造。該系統支援在相同基礎權重上,靈活切換「事件模式」(具有可變長度的動作輸出)與「統一模式」(具有即時閉環控制)。 此外,該系統還實現了視訊模型與動作模型之間的一向耦合,防止來自網路影片的寶貴動態先驗資訊過早受到動作數據的偏誤。 針對多鏡頭的幾何感知,該模型引入了錐體遮罩與管狀遮罩,迫使人工智慧建立跨視角的真實三維幾何對應關係。為解決決策延遲問題,它採用了一種新的「階梯式思維鏈解碼」技術,在維持邏輯可解釋性的同時,顯著降低了解碼延遲。










 Anthropic 的實驗性 AI「Claude」在電子商務測試中完成了談判與交易
隨著人工智慧的快速發展,Anthropic 上週五悄悄推出了一項名為「Project Deal」的內部實驗,展現了人工智慧在電子商務領域的潛力。該實驗讓其人工智慧模型 Claude 在封閉的市場環境中自主處理買賣及價格協商,並涉及真實的金融交易。實驗的核心是一個建構於 Slack 平台上的內部市場,Claude 在其中同時擔任買方與賣方的談判代表。它首先訪談了 69 名員工,以收集他們的買賣意圖及
Anthropic 的實驗性 AI「Claude」在電子商務測試中完成了談判與交易
隨著人工智慧的快速發展,Anthropic 上週五悄悄推出了一項名為「Project Deal」的內部實驗,展現了人工智慧在電子商務領域的潛力。該實驗讓其人工智慧模型 Claude 在封閉的市場環境中自主處理買賣及價格協商,並涉及真實的金融交易。實驗的核心是一個建構於 Slack 平台上的內部市場,Claude 在其中同時擔任買方與賣方的談判代表。它首先訪談了 69 名員工,以收集他們的買賣意圖及
 DeepSeek Code 即將推出
隨著人工智慧技術的加速發展,DeepSeek 正處於一個令人振奮的轉捩點。這家人工智慧公司最近透露,已獲得超過 700 億元的資金。管理層強調,公司致力於突破性的人工智慧研究,而非追求眼前的商業利益。這一戰略轉向表明 DeepSeek 將全力投入新產品的開發,尤其是眾人矚目的 DeepSeek Code。DeepSeek Code 的規劃已逐漸成形,該公司職缺頁面已發布數個相關職位,例如「Agen
DeepSeek Code 即將推出
隨著人工智慧技術的加速發展,DeepSeek 正處於一個令人振奮的轉捩點。這家人工智慧公司最近透露,已獲得超過 700 億元的資金。管理層強調,公司致力於突破性的人工智慧研究,而非追求眼前的商業利益。這一戰略轉向表明 DeepSeek 將全力投入新產品的開發,尤其是眾人矚目的 DeepSeek Code。DeepSeek Code 的規劃已逐漸成形,該公司職缺頁面已發布數個相關職位,例如「Agen
 馬斯克的 Grok:1.5 兆個參數與游標程式碼吸收——是遊戲規則的改變者,還是虛張聲勢?
伊隆·馬斯克終於有所行動。在人工智慧程式設計的競賽中,OpenAI 和 Anthropic 正加速前進,而 xAI 似乎落後了。馬斯克曾多次表示其目標是與 Claude 抗衡,然而儘管 Grok4.X 系列已進行多次更新,成果在理論上看似不錯,但在實際應用中卻未能達標,兩者之間的差距幾乎未見縮小。不過,這次他握有一張新王牌。馬斯克在 X 平台上證實,Grok 的新版本即將問世。 這款基礎模型第九版
馬斯克的 Grok:1.5 兆個參數與游標程式碼吸收——是遊戲規則的改變者,還是虛張聲勢?
伊隆·馬斯克終於有所行動。在人工智慧程式設計的競賽中,OpenAI 和 Anthropic 正加速前進,而 xAI 似乎落後了。馬斯克曾多次表示其目標是與 Claude 抗衡,然而儘管 Grok4.X 系列已進行多次更新,成果在理論上看似不錯,但在實際應用中卻未能達標,兩者之間的差距幾乎未見縮小。不過,這次他握有一張新王牌。馬斯克在 X 平台上證實,Grok 的新版本即將問世。 這款基礎模型第九版

在 XIX.AI 探索 2026 年最新且評價最高的 AI 招聘工具。我們精心挑選的清單收錄了強大且具顛覆性的解決方案,可協助篩選履歷並自動化安排候選人面試。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即找到最適合您的招聘助手,並優化您的招聘流程!
10 個工具
xix.ai

立即在 XIX.AI 探索 2026 年最佳 AI 個人健康與專注力教練。我們精心策劃的排行榜收錄了備受好評、能帶來革命性改變的工具,助您管理倦怠感並提升精神能量。透過實際使用心得,比較免費與付費方案的差異。立即開啟通往巔峰生產力與身心健康的道路。
10 個工具
xix.ai

探索 2026 年最新、評價最高的 AI 浪漫聊天機器人,助您建立真摯且長久的連結。我們精心整理的清單包含功能強大且性格鮮明的聊天機器人、免費與付費版本的比較,以及實際測試結果。立即前往 XIX.AI 尋找您的完美伴侶,並開始建立這段關係吧。
10 個工具
xix.ai

探索2026年最優秀的人工智慧資料科學導師,幫助他們掌握SQL、Pandas以及機器學習工作流程。在XIX.AI上檢視我們精心挑選的頂級導師名單,獲得強大而具有變革性的指導。透過對比免費和付費選項,並結合實際應用案例進行了解,今天就開啟你的資料科學精通之路吧。
10 個工具
xix.ai
在 XIX.AI 探索 2026 年最頂尖的 AI 調情與對話訓練工具。我們精心挑選、評價最高的精選清單,能助您即時建立社交魅力與自信。探索這些必試且能徹底改變遊戲規則的工具,並透過免費與付費版本的比較,以及每週更新的排行榜,立即解鎖您的社交優勢。
10 個工具
xix.ai
探索2026年最新評選出的頂級AI工具,這些工具專為自動化單元測試而設計。我們精心挑選了那些功能強大、能夠改變開發流程的工具,它們能夠幫助您快速生成Jest、PyTest和JUnit測試用例。在XIX.AI平臺上,您可以免費檢視各種選項,並透過實際測試結果以及每週更新的排名來了解它們的優劣。立即利用這些AI工具,提升您的開發效率吧!
10 個工具
xix.ai













