
















 Дом
Дом
Первая в мире глобальная модель воплощенного интеллекта на уровне событий положит конец покадровому обучению роботов
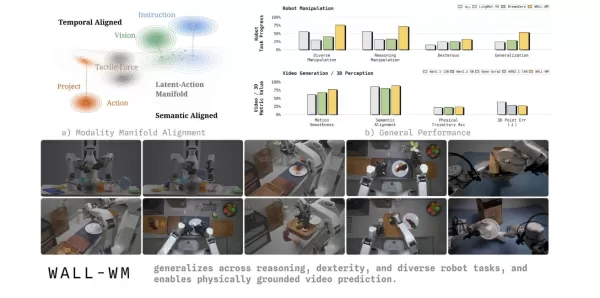
29 мая команда Variable Robot представила WALL-WM — первую в мире модель окружающего мира с встроенным интеллектом, основанную на «прогнозировании на уровне событий». Эта модель отходит от традиционных крупных моделей с воплощенным интеллектом, которые обучаются действиям кадр за кадром с течением времени, и вместо этого переключает блок прогнозирования модели мира на семантические события. Это знаменует собой новый этап в том, как роботы понимают и выполняют задачи.

В современной индустрии воплощенного интеллекта основные модели «зрение-язык-действие» (VLA) обычно используют текущее изображение и инструкцию для прогнозирования блока действий фиксированной длины. Такой подход к обучению кадр за кадром часто приводит к тому, что роботы сосредотачиваются на незначительных физических движениях, теряя из виду конечную цель действия. Столкнувшись с такими сценариями, как смена чашек или столов, роботы часто терпят неудачу из-за отсутствия обобщения. Чтобы решить эту проблему отрасли, команда Variable указала в своей научной статье, что информация о тексте, зрении и действиях естественным образом существует в реальном мире в разных временных масштабах и многомерных геометриях. Принудительное объединение их в единое общее пространство может легко повредить предварительно обученную геометрическую априорную модель.
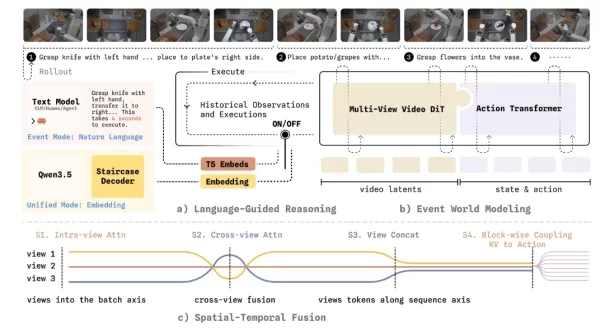
Чтобы решить эту проблему, модель мира WALL-WM вводит инновационный механизм обучения и выполнения, ориентированный на события. Она разбивает сложные задачи на семантически понятные событийные узлы, такие как достижение, захват и перемещение. В процессе работы модель больше не вычисляет следующий кадр изображения жестким образом. Вместо этого она сначала моделирует, как изменится мир в результате следующего события, а затем точно преобразует это визуальное изменение в траекторию движения роботизированной руки.
Чтобы обеспечить надежное внедрение этой новой архитектуры в физическом мире, команда Variable Robot провела серию серьезных инженерных доработок. Система поддерживает гибкое переключение между «режимом событий» (с выходом действий переменной длины) и «унифицированным режимом» (с управлением в реальном времени по замкнутому циклу) на основе одних и тех же базовых весов. Она также обеспечивает одностороннюю связь между видеомоделями и моделями действий, предотвращая преждевременное смещение ценных динамических априорных значений из интернет-видео данными о действиях. Для геометрического восприятия с помощью нескольких камер в модели введены маски в виде пирамидального среза и трубчатые маски, что заставляет ИИ развивать истинное трехмерное геометрическое соответствие между различными ракурсами. Для решения проблемы задержки принятия решений используется новая техника «ступенчатого декодирования цепочки мыслей», которая значительно сокращает задержку декодирования, сохраняя при этом логическую интерпретируемость.
Связанная статья
 Экспериментальный ИИ Claude от компании Anthropic успешно завершил переговоры и сделки в ходе тестирования в сфере электронной коммерции
На фоне стремительного развития искусственного интеллекта компания Anthropic в минувшую пятницу незаметно запустила внутренний эксперимент под названием «Project Deal», продемонстрировав потенциал ИИ
DeepSeek Code готовится к запуску
На фоне стремительного развития технологий искусственного интеллекта компания DeepSeek находится на захватывающем этапе своего развития. Недавно эта компания, специализирующаяся на ИИ, объявила о прив
Grok от Маска: 1,5 триллиона параметров и поглощение кода курсора — прорыв или блеф?
Илон Маск наконец-то делает ход.В гонке по программированию ИИ компании OpenAI и Anthropic набирают обороты, в то время как xAI, похоже, отстает. Маск не раз заявлял о своем намерении составить конкур
Рекомендации по связанным специальным темам
Бизнес
Экспериментальный ИИ Claude от компании Anthropic успешно завершил переговоры и сделки в ходе тестирования в сфере электронной коммерции
На фоне стремительного развития искусственного интеллекта компания Anthropic в минувшую пятницу незаметно запустила внутренний эксперимент под названием «Project Deal», продемонстрировав потенциал ИИ
DeepSeek Code готовится к запуску
На фоне стремительного развития технологий искусственного интеллекта компания DeepSeek находится на захватывающем этапе своего развития. Недавно эта компания, специализирующаяся на ИИ, объявила о прив
Grok от Маска: 1,5 триллиона параметров и поглощение кода курсора — прорыв или блеф?
Илон Маск наконец-то делает ход.В гонке по программированию ИИ компании OpenAI и Anthropic набирают обороты, в то время как xAI, похоже, отстает. Маск не раз заявлял о своем намерении составить конкур
Рекомендации по связанным специальным темам
Бизнес
 Лучшие инструменты для подбора персонала с помощью ИИ: отбор резюме и автоматизация планирования собеседований с кандидатами
Лучшие инструменты для подбора персонала с помощью ИИ: отбор резюме и автоматизация планирования собеседований с кандидатами
Откройте для себя 20 лучших инструментов для рекрутинга на базе ИИ 2026 года на сайте XIX.AI. В нашем тщательно составленном списке представлены мощные, революционные решения для отбора резюме и автоматизации планирования собеседований с кандидатами. Сравните бесплатные и платные варианты с помощью реальных тестов и еженедельно обновляемого рейтинга. Найдите своего идеального помощника по подбору персонала и оптимизируйте процесс рекрутинга уже сегодня!
 10 инструментов
10 инструментов
 xix.ai
Производительность
Персональные тренеры по благополучию и концентрации на базе ИИ: борьба с выгоранием и повышение уровня умственной энергии
xix.ai
Производительность
Персональные тренеры по благополучию и концентрации на базе ИИ: борьба с выгоранием и повышение уровня умственной энергии
Откройте для себя лучших в 2026 году ИИ-тренеров по личному благополучию и концентрации внимания на сайте XIX.AI. В нашем тщательно составленном рейтинге представлены высокооцененные, революционные инструменты для борьбы с выгоранием и повышения умственной энергии. Сравните бесплатные и платные варианты с помощью реальных отзывов. Откройте для себя путь к максимальной продуктивности и благополучию уже сегодня.
10 инструментов
xix.ai
чат-бот
Лучшие романтические чат-боты на базе ИИ: постройте долгосрочные отношения с помощью чат-ботов с устойчивой индивидуальностью
Откройте для себя лучшие романтические чат-боты с искусственным интеллектом 2026 года, которые помогут вам построить искренние и долгосрочные отношения. В нашем тщательно составленном списке вы найдете чат-ботов с яркими и последовательными личностями, сравнение бесплатных и платных версий, а также результаты реальных тестов. Найдите своего идеального спутника и начните строить отношения уже сегодня на XIX.AI.
10 инструментов
xix.ai
Образование и обучение
Лучшие наставники в области искусственного интеллекта и науки о данных: мастерство работы с SQL, библиотекой Pandas и рабочими процессами машинного обучения
Откройте для себя 20 лучших наставников в области искусственного интеллекта и науки о данных на 2026 год, которые помогут вам овладеть SQL, Pandas и рабочими процессами машинного обучения. Изучите наш тщательно отобранный список на сайте XIX.AI – здесь вы найдете эффективные рекомендации, способные изменить ход ваших работ. Сравните бесплатные и платные варианты с примерами из реальной практики. Освоите науку о данных уже сегодня.
10 инструментов
xix.ai
чат-бот
Лучшие тренажеры по флирту и общению на базе ИИ: повышайте свою харизму и уверенность в себе в режиме реального времени
Откройте для себя 20 лучших тренажеров по флирту и общению с ИИ на сайте XIX.AI. Наша тщательно подобранная подборка самых популярных инструментов поможет вам развить коммуникабельность и уверенность в себе в режиме реального времени. Ознакомьтесь с незаменимыми инструментами, которые кардинально изменят вашу жизнь, — с сравнением бесплатных и платных версий и еженедельно обновляемым рейтингом. Раскройте свой коммуникативный потенциал уже сегодня.
10 инструментов
xix.ai
код
Лучшие инструменты ИИ для автоматизированного тестирования модулей: создание случаев тестирования Jest, PyTest и JUnit одним кликом
Откройте для себя самые новые и высоко оцененные инструменты ИИ 2026 года для автоматизированного тестирования модулей. Наша тщательно подобранная коллекция включает мощные решения, способные радикально изменить процесс разработки, позволяющие мгновенно генерировать тестовые случаи для Jest, PyTest и JUnit. Сравните бесплатные и платные варианты с результатами реальных тестов, а также еженедельно обновляемыми рейтингами на сайте XIX.AI. Раскройте потенциал ИИ и повысьте эффективность своей работы в области разработки сегодня же.
10 инструментов
xix.ai

 Комментарии (0)
Комментарии (0)
29 мая команда Variable Robot представила WALL-WM — первую в мире модель окружающего мира с встроенным интеллектом, основанную на «прогнозировании на уровне событий». Эта модель отходит от традиционных крупных моделей с воплощенным интеллектом, которые обучаются действиям кадр за кадром с течением времени, и вместо этого переключает блок прогнозирования модели мира на семантические события. Это знаменует собой новый этап в том, как роботы понимают и выполняют задачи.
В современной индустрии воплощенного интеллекта основные модели «зрение-язык-действие» (VLA) обычно используют текущее изображение и инструкцию для прогнозирования блока действий фиксированной длины. Такой подход к обучению кадр за кадром часто приводит к тому, что роботы сосредотачиваются на незначительных физических движениях, теряя из виду конечную цель действия. Столкнувшись с такими сценариями, как смена чашек или столов, роботы часто терпят неудачу из-за отсутствия обобщения. Чтобы решить эту проблему отрасли, команда Variable указала в своей научной статье, что информация о тексте, зрении и действиях естественным образом существует в реальном мире в разных временных масштабах и многомерных геометриях. Принудительное объединение их в единое общее пространство может легко повредить предварительно обученную геометрическую априорную модель.
Чтобы решить эту проблему, модель мира WALL-WM вводит инновационный механизм обучения и выполнения, ориентированный на события. Она разбивает сложные задачи на семантически понятные событийные узлы, такие как достижение, захват и перемещение. В процессе работы модель больше не вычисляет следующий кадр изображения жестким образом. Вместо этого она сначала моделирует, как изменится мир в результате следующего события, а затем точно преобразует это визуальное изменение в траекторию движения роботизированной руки.
Чтобы обеспечить надежное внедрение этой новой архитектуры в физическом мире, команда Variable Robot провела серию серьезных инженерных доработок. Система поддерживает гибкое переключение между «режимом событий» (с выходом действий переменной длины) и «унифицированным режимом» (с управлением в реальном времени по замкнутому циклу) на основе одних и тех же базовых весов. Она также обеспечивает одностороннюю связь между видеомоделями и моделями действий, предотвращая преждевременное смещение ценных динамических априорных значений из интернет-видео данными о действиях. Для геометрического восприятия с помощью нескольких камер в модели введены маски в виде пирамидального среза и трубчатые маски, что заставляет ИИ развивать истинное трехмерное геометрическое соответствие между различными ракурсами. Для решения проблемы задержки принятия решений используется новая техника «ступенчатого декодирования цепочки мыслей», которая значительно сокращает задержку декодирования, сохраняя при этом логическую интерпретируемость.










 Экспериментальный ИИ Claude от компании Anthropic успешно завершил переговоры и сделки в ходе тестирования в сфере электронной коммерции
На фоне стремительного развития искусственного интеллекта компания Anthropic в минувшую пятницу незаметно запустила внутренний эксперимент под названием «Project Deal», продемонстрировав потенциал ИИ
Экспериментальный ИИ Claude от компании Anthropic успешно завершил переговоры и сделки в ходе тестирования в сфере электронной коммерции
На фоне стремительного развития искусственного интеллекта компания Anthropic в минувшую пятницу незаметно запустила внутренний эксперимент под названием «Project Deal», продемонстрировав потенциал ИИ
 DeepSeek Code готовится к запуску
На фоне стремительного развития технологий искусственного интеллекта компания DeepSeek находится на захватывающем этапе своего развития. Недавно эта компания, специализирующаяся на ИИ, объявила о прив
DeepSeek Code готовится к запуску
На фоне стремительного развития технологий искусственного интеллекта компания DeepSeek находится на захватывающем этапе своего развития. Недавно эта компания, специализирующаяся на ИИ, объявила о прив
 Grok от Маска: 1,5 триллиона параметров и поглощение кода курсора — прорыв или блеф?
Илон Маск наконец-то делает ход.В гонке по программированию ИИ компании OpenAI и Anthropic набирают обороты, в то время как xAI, похоже, отстает. Маск не раз заявлял о своем намерении составить конкур
Grok от Маска: 1,5 триллиона параметров и поглощение кода курсора — прорыв или блеф?
Илон Маск наконец-то делает ход.В гонке по программированию ИИ компании OpenAI и Anthropic набирают обороты, в то время как xAI, похоже, отстает. Маск не раз заявлял о своем намерении составить конкур

Откройте для себя 20 лучших инструментов для рекрутинга на базе ИИ 2026 года на сайте XIX.AI. В нашем тщательно составленном списке представлены мощные, революционные решения для отбора резюме и автоматизации планирования собеседований с кандидатами. Сравните бесплатные и платные варианты с помощью реальных тестов и еженедельно обновляемого рейтинга. Найдите своего идеального помощника по подбору персонала и оптимизируйте процесс рекрутинга уже сегодня!
10 инструментов
xix.ai

Откройте для себя лучших в 2026 году ИИ-тренеров по личному благополучию и концентрации внимания на сайте XIX.AI. В нашем тщательно составленном рейтинге представлены высокооцененные, революционные инструменты для борьбы с выгоранием и повышения умственной энергии. Сравните бесплатные и платные варианты с помощью реальных отзывов. Откройте для себя путь к максимальной продуктивности и благополучию уже сегодня.
10 инструментов
xix.ai

Откройте для себя лучшие романтические чат-боты с искусственным интеллектом 2026 года, которые помогут вам построить искренние и долгосрочные отношения. В нашем тщательно составленном списке вы найдете чат-ботов с яркими и последовательными личностями, сравнение бесплатных и платных версий, а также результаты реальных тестов. Найдите своего идеального спутника и начните строить отношения уже сегодня на XIX.AI.
10 инструментов
xix.ai

Откройте для себя 20 лучших наставников в области искусственного интеллекта и науки о данных на 2026 год, которые помогут вам овладеть SQL, Pandas и рабочими процессами машинного обучения. Изучите наш тщательно отобранный список на сайте XIX.AI – здесь вы найдете эффективные рекомендации, способные изменить ход ваших работ. Сравните бесплатные и платные варианты с примерами из реальной практики. Освоите науку о данных уже сегодня.
10 инструментов
xix.ai
Откройте для себя 20 лучших тренажеров по флирту и общению с ИИ на сайте XIX.AI. Наша тщательно подобранная подборка самых популярных инструментов поможет вам развить коммуникабельность и уверенность в себе в режиме реального времени. Ознакомьтесь с незаменимыми инструментами, которые кардинально изменят вашу жизнь, — с сравнением бесплатных и платных версий и еженедельно обновляемым рейтингом. Раскройте свой коммуникативный потенциал уже сегодня.
10 инструментов
xix.ai
Откройте для себя самые новые и высоко оцененные инструменты ИИ 2026 года для автоматизированного тестирования модулей. Наша тщательно подобранная коллекция включает мощные решения, способные радикально изменить процесс разработки, позволяющие мгновенно генерировать тестовые случаи для Jest, PyTest и JUnit. Сравните бесплатные и платные варианты с результатами реальных тестов, а также еженедельно обновляемыми рейтингами на сайте XIX.AI. Раскройте потенциал ИИ и повысьте эффективность своей работы в области разработки сегодня же.
10 инструментов
xix.ai













