
















 首页
首页全球首个事件级具身智能世界模型,结束了机器人的逐帧学习
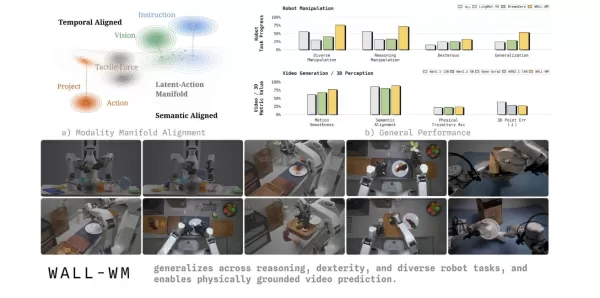
5月29日,Variable Robot团队发布了WALL-WM,这是全球首个基于“事件级预测”构建的具身智能世界模型。 该模型突破了传统具身大型模型逐帧学习动作的局限,将世界模型的预测单元转换为语义事件。这标志着机器人在理解和执行任务方面迈入了一个新阶段。

在当前的具身智能领域,主流的视觉-语言-动作(VLA)模型通常基于当前图像和指令来预测固定长度的动作块。这种逐帧训练方法往往导致机器人专注于细微的肢体动作,却忽视了动作的最终目标。 当面对更换杯子或桌子等场景时,机器人常因缺乏泛化能力而失败。为解决这一行业痛点,Variable团队在其学术论文中指出,文本、视觉和动作信息在现实世界中天然存在于不同的时间尺度和流形几何结构中。 将它们强行置于单一共享空间中,极易破坏预训练的几何先验。
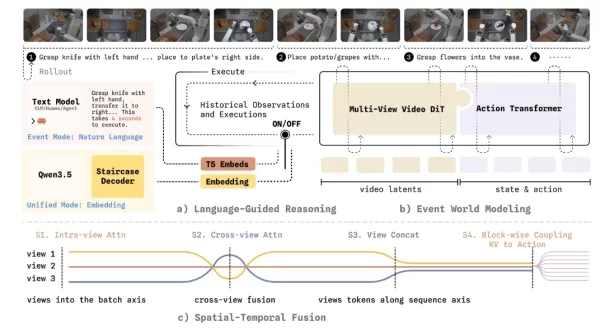
为应对这一挑战,WALL-WM 世界模型引入了一种创新的事件中心化训练与执行机制。它将复杂任务分解为语义清晰的事件节点,例如伸手、抓取和移动。 在运行时,该模型不再机械地计算下一帧图像。相反,它首先模拟世界因下一个事件将如何变化,然后将这种视觉变化精确转化为机械臂的运动轨迹。
为确保这一新架构能在物理世界中可靠部署,Variable Robot团队进行了一系列深度工程改造。该系统支持在同一基础权重上灵活切换“事件模式”(具有可变长度的动作输出)与“统一模式”(具有实时闭环控制)。 该系统还实现了视频模型与动作模型之间的单向耦合,防止来自互联网视频的宝贵动态先验信息过早受到动作数据的偏置。 针对多摄像头间的几何感知,该模型引入了截锥体遮罩和管状遮罩,迫使 AI 建立跨视图的真实三维几何对应关系。为解决决策延迟问题,它采用了一种新的“分步思维链解码”技术,在保持逻辑可解释性的同时,显著降低了解码延迟。
相关文章
 DeepSeek Code 即将发布
随着人工智能技术的加速发展,DeepSeek正处于一个激动人心的关键时刻。这家人工智能公司近日透露,已获得超过700亿元的融资。公司管理层强调,将致力于开创性的人工智能研究,而非追求眼前的商业利益。这一战略转型表明,DeepSeek将全力投入新产品的开发,尤其是备受期待的DeepSeek Code。DeepSeek Code的规划已初具雏形,公司招聘页面上已发布多个相关职位,例如“Agent Ha
马斯克的Grok:1.5万亿参数与光标代码吸收——颠覆性突破还是虚张声势?
埃隆·马斯克终于开始行动了。在人工智能编程竞赛中,OpenAI和Anthropic正加速前进,而xAI似乎有些落后。马斯克曾多次表示要与Claude一较高下,尽管Grok4.X系列已多次更新,但其成果在理论上看似不错,实际应用中却未能达到预期,双方的差距几乎未见缩小。不过,这次他手中握有一张新牌。马斯克在X平台确认,Grok的新版本即将问世。 这款基础模型第九版的内部代号已确定,参数规模高达1.5
OpenAI 悄悄修改章程,以增加解雇阿尔特曼的难度
在2023年那场类似政变的事件之后,OpenAI通过更新公司章程,进一步巩固了对首席执行官萨姆·阿尔特曼的保护措施。最近公布的法庭文件显示,阿尔特曼的职位如今已牢不可破,针对外部干预或董事会内部试图罢免他的行为,设置了大幅提高的门槛。在埃隆·马斯克起诉OpenAI一案中,一位专家证人指出,这些变更是在公司向营利模式转型之际悄然进行的。与之前的简单多数表决规则不同,新政策为奥特曼提供了强有力的免遭解
相关专题推荐
商业
DeepSeek Code 即将发布
随着人工智能技术的加速发展,DeepSeek正处于一个激动人心的关键时刻。这家人工智能公司近日透露,已获得超过700亿元的融资。公司管理层强调,将致力于开创性的人工智能研究,而非追求眼前的商业利益。这一战略转型表明,DeepSeek将全力投入新产品的开发,尤其是备受期待的DeepSeek Code。DeepSeek Code的规划已初具雏形,公司招聘页面上已发布多个相关职位,例如“Agent Ha
马斯克的Grok:1.5万亿参数与光标代码吸收——颠覆性突破还是虚张声势?
埃隆·马斯克终于开始行动了。在人工智能编程竞赛中,OpenAI和Anthropic正加速前进,而xAI似乎有些落后。马斯克曾多次表示要与Claude一较高下,尽管Grok4.X系列已多次更新,但其成果在理论上看似不错,实际应用中却未能达到预期,双方的差距几乎未见缩小。不过,这次他手中握有一张新牌。马斯克在X平台确认,Grok的新版本即将问世。 这款基础模型第九版的内部代号已确定,参数规模高达1.5
OpenAI 悄悄修改章程,以增加解雇阿尔特曼的难度
在2023年那场类似政变的事件之后,OpenAI通过更新公司章程,进一步巩固了对首席执行官萨姆·阿尔特曼的保护措施。最近公布的法庭文件显示,阿尔特曼的职位如今已牢不可破,针对外部干预或董事会内部试图罢免他的行为,设置了大幅提高的门槛。在埃隆·马斯克起诉OpenAI一案中,一位专家证人指出,这些变更是在公司向营利模式转型之际悄然进行的。与之前的简单多数表决规则不同,新政策为奥特曼提供了强有力的免遭解
相关专题推荐
商业
 最佳人工智能招聘工具:筛选简历并自动安排候选人面试
最佳人工智能招聘工具:筛选简历并自动安排候选人面试
在 XIX.AI 上探索 2026 年最新、评价最高的人工智能招聘工具。我们精心筛选的清单汇集了功能强大、颠覆传统的解决方案,可帮助您筛选简历并自动安排候选人面试。通过实际测试和每周更新的排名,对比免费与付费选项。立即找到最适合您的招聘助手,优化您的招聘流程!
 10 个工具
10 个工具
 xix.ai
生产率
AI个人健康与专注力教练:缓解倦怠,提升精神能量
xix.ai
生产率
AI个人健康与专注力教练:缓解倦怠,提升精神能量
立即访问 XIX.AI,探索 2026 年最优秀的 AI 个人健康与专注力教练。我们的精选排行榜汇集了广受好评、具有颠覆性意义的工具,助您缓解倦怠、提升精神能量。通过真实案例分析,对比免费与付费选项。立即开启通往巅峰生产力和身心健康的道路。
10 个工具
xix.ai
聊天机器人
备受好评的AI浪漫聊天机器人:凭借稳定的个性建立长期关系
探索2026年最新、评价最高的人工智能浪漫聊天机器人,助您建立真实而长久的联系。我们的精选清单涵盖了功能强大且性格鲜明的聊天机器人,并提供了免费与付费版本的对比分析以及实际测试结果。在XIX.AI上找到您的完美伴侣,立即开始建立联系吧。
10 个工具
xix.ai
教育与学习
最佳AI数据科学导师:精通SQL、Pandas及机器学习工作流程
探索2026年最优秀的人工智能数据科学导师,帮助他们掌握SQL、Pandas以及机器学习工作流程。在XIX.AI上查看我们精心挑选的顶级导师名单,获得强大而具有变革性的指导。通过对比免费和付费选项,并结合实际应用案例进行了解,今天就开启你的数据科学精通之路吧。
10 个工具
xix.ai
聊天机器人
最佳AI调情与对话训练工具:实时提升社交魅力与自信
在 XIX.AI 上探索 2026 年最优秀的 AI 调情与对话训练工具。我们精心挑选的高评分工具助您实时提升社交魅力与自信。探索这些必试的、颠覆性的工具,查看免费版与付费版的对比,并了解每周更新的排行榜。立即开启您的社交优势。
10 个工具
xix.ai
代码
最适合自动化单元测试的最佳AI工具:一键生成Jest、PyTest和JUnit测试用例
探索2026年最新评选出的顶级AI工具,这些工具专为自动化单元测试而设计。我们精心挑选了那些功能强大、能够改变开发流程的工具,它们能够帮助您快速生成Jest、PyTest和JUnit测试用例。在XIX.AI平台上,您可以免费查看各种选项,并通过实际测试结果以及每周更新的排名来了解它们的优劣。立即利用这些AI工具,提升您的开发效率吧!
10 个工具
xix.ai

 评论 (0)
0/500
评论 (0)
0/500
5月29日,Variable Robot团队发布了WALL-WM,这是全球首个基于“事件级预测”构建的具身智能世界模型。 该模型突破了传统具身大型模型逐帧学习动作的局限,将世界模型的预测单元转换为语义事件。这标志着机器人在理解和执行任务方面迈入了一个新阶段。
在当前的具身智能领域,主流的视觉-语言-动作(VLA)模型通常基于当前图像和指令来预测固定长度的动作块。这种逐帧训练方法往往导致机器人专注于细微的肢体动作,却忽视了动作的最终目标。 当面对更换杯子或桌子等场景时,机器人常因缺乏泛化能力而失败。为解决这一行业痛点,Variable团队在其学术论文中指出,文本、视觉和动作信息在现实世界中天然存在于不同的时间尺度和流形几何结构中。 将它们强行置于单一共享空间中,极易破坏预训练的几何先验。
为应对这一挑战,WALL-WM 世界模型引入了一种创新的事件中心化训练与执行机制。它将复杂任务分解为语义清晰的事件节点,例如伸手、抓取和移动。 在运行时,该模型不再机械地计算下一帧图像。相反,它首先模拟世界因下一个事件将如何变化,然后将这种视觉变化精确转化为机械臂的运动轨迹。
为确保这一新架构能在物理世界中可靠部署,Variable Robot团队进行了一系列深度工程改造。该系统支持在同一基础权重上灵活切换“事件模式”(具有可变长度的动作输出)与“统一模式”(具有实时闭环控制)。 该系统还实现了视频模型与动作模型之间的单向耦合,防止来自互联网视频的宝贵动态先验信息过早受到动作数据的偏置。 针对多摄像头间的几何感知,该模型引入了截锥体遮罩和管状遮罩,迫使 AI 建立跨视图的真实三维几何对应关系。为解决决策延迟问题,它采用了一种新的“分步思维链解码”技术,在保持逻辑可解释性的同时,显著降低了解码延迟。










 DeepSeek Code 即将发布
随着人工智能技术的加速发展,DeepSeek正处于一个激动人心的关键时刻。这家人工智能公司近日透露,已获得超过700亿元的融资。公司管理层强调,将致力于开创性的人工智能研究,而非追求眼前的商业利益。这一战略转型表明,DeepSeek将全力投入新产品的开发,尤其是备受期待的DeepSeek Code。DeepSeek Code的规划已初具雏形,公司招聘页面上已发布多个相关职位,例如“Agent Ha
DeepSeek Code 即将发布
随着人工智能技术的加速发展,DeepSeek正处于一个激动人心的关键时刻。这家人工智能公司近日透露,已获得超过700亿元的融资。公司管理层强调,将致力于开创性的人工智能研究,而非追求眼前的商业利益。这一战略转型表明,DeepSeek将全力投入新产品的开发,尤其是备受期待的DeepSeek Code。DeepSeek Code的规划已初具雏形,公司招聘页面上已发布多个相关职位,例如“Agent Ha
 马斯克的Grok:1.5万亿参数与光标代码吸收——颠覆性突破还是虚张声势?
埃隆·马斯克终于开始行动了。在人工智能编程竞赛中,OpenAI和Anthropic正加速前进,而xAI似乎有些落后。马斯克曾多次表示要与Claude一较高下,尽管Grok4.X系列已多次更新,但其成果在理论上看似不错,实际应用中却未能达到预期,双方的差距几乎未见缩小。不过,这次他手中握有一张新牌。马斯克在X平台确认,Grok的新版本即将问世。 这款基础模型第九版的内部代号已确定,参数规模高达1.5
马斯克的Grok:1.5万亿参数与光标代码吸收——颠覆性突破还是虚张声势?
埃隆·马斯克终于开始行动了。在人工智能编程竞赛中,OpenAI和Anthropic正加速前进,而xAI似乎有些落后。马斯克曾多次表示要与Claude一较高下,尽管Grok4.X系列已多次更新,但其成果在理论上看似不错,实际应用中却未能达到预期,双方的差距几乎未见缩小。不过,这次他手中握有一张新牌。马斯克在X平台确认,Grok的新版本即将问世。 这款基础模型第九版的内部代号已确定,参数规模高达1.5
 OpenAI 悄悄修改章程,以增加解雇阿尔特曼的难度
在2023年那场类似政变的事件之后,OpenAI通过更新公司章程,进一步巩固了对首席执行官萨姆·阿尔特曼的保护措施。最近公布的法庭文件显示,阿尔特曼的职位如今已牢不可破,针对外部干预或董事会内部试图罢免他的行为,设置了大幅提高的门槛。在埃隆·马斯克起诉OpenAI一案中,一位专家证人指出,这些变更是在公司向营利模式转型之际悄然进行的。与之前的简单多数表决规则不同,新政策为奥特曼提供了强有力的免遭解
OpenAI 悄悄修改章程,以增加解雇阿尔特曼的难度
在2023年那场类似政变的事件之后,OpenAI通过更新公司章程,进一步巩固了对首席执行官萨姆·阿尔特曼的保护措施。最近公布的法庭文件显示,阿尔特曼的职位如今已牢不可破,针对外部干预或董事会内部试图罢免他的行为,设置了大幅提高的门槛。在埃隆·马斯克起诉OpenAI一案中,一位专家证人指出,这些变更是在公司向营利模式转型之际悄然进行的。与之前的简单多数表决规则不同,新政策为奥特曼提供了强有力的免遭解
在 XIX.AI 上探索 2026 年最新、评价最高的人工智能招聘工具。我们精心筛选的清单汇集了功能强大、颠覆传统的解决方案,可帮助您筛选简历并自动安排候选人面试。通过实际测试和每周更新的排名,对比免费与付费选项。立即找到最适合您的招聘助手,优化您的招聘流程!
10 个工具
xix.ai
立即访问 XIX.AI,探索 2026 年最优秀的 AI 个人健康与专注力教练。我们的精选排行榜汇集了广受好评、具有颠覆性意义的工具,助您缓解倦怠、提升精神能量。通过真实案例分析,对比免费与付费选项。立即开启通往巅峰生产力和身心健康的道路。
10 个工具
xix.ai
探索2026年最新、评价最高的人工智能浪漫聊天机器人,助您建立真实而长久的联系。我们的精选清单涵盖了功能强大且性格鲜明的聊天机器人,并提供了免费与付费版本的对比分析以及实际测试结果。在XIX.AI上找到您的完美伴侣,立即开始建立联系吧。
10 个工具
xix.ai
探索2026年最优秀的人工智能数据科学导师,帮助他们掌握SQL、Pandas以及机器学习工作流程。在XIX.AI上查看我们精心挑选的顶级导师名单,获得强大而具有变革性的指导。通过对比免费和付费选项,并结合实际应用案例进行了解,今天就开启你的数据科学精通之路吧。
10 个工具
xix.ai
在 XIX.AI 上探索 2026 年最优秀的 AI 调情与对话训练工具。我们精心挑选的高评分工具助您实时提升社交魅力与自信。探索这些必试的、颠覆性的工具,查看免费版与付费版的对比,并了解每周更新的排行榜。立即开启您的社交优势。
10 个工具
xix.ai
探索2026年最新评选出的顶级AI工具,这些工具专为自动化单元测试而设计。我们精心挑选了那些功能强大、能够改变开发流程的工具,它们能够帮助您快速生成Jest、PyTest和JUnit测试用例。在XIX.AI平台上,您可以免费查看各种选项,并通过实际测试结果以及每周更新的排名来了解它们的优劣。立即利用这些AI工具,提升您的开发效率吧!
10 个工具
xix.ai













