
















 Home
HomeAnt Forest LingBot Unveils Open-Source 2.7T Dataset with 2M Real Samples Across 6 Cameras
On March 31st, Ant Lingbo Technology officially open-sourced the large-scale RGB-D dataset, LingBot-Depth-Dataset. This collection contains 3 million high-quality sample pairs, with 2 million captured from real-world environments and 1 million synthetically rendered. Totaling 2.71TB, it encompasses data from six mainstream depth cameras, making it the largest open-source RGB-D dataset primarily based on real scenes. This release provides richer, more realistic data to advance research in embodied intelligence, spatial perception, and 3D vision.
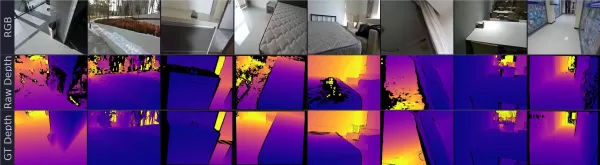
(Image: A sample from the LingBot-Depth-Dataset. From top to bottom: the RGB image, the sensor's raw depth map, and the ground truth depth map. The dataset provides both raw and ground truth depth information, offering robust support for training and evaluating models in real-world conditions.)
Publicly available depth datasets have long faced challenges of limited scale, inadequate real-world scene coverage, and reliance on single hardware types. Many datasets are largely synthetic, exhibiting significant gaps compared to real sensor data in terms of noise patterns, depth holes, and material representation, which hinders the practical deployment of trained models.
The LingBot-Depth-Dataset effectively addresses this data gap in spatial perception by providing large-scale, real-scene captures. Each sample includes an RGB image, a raw sensor depth map, and a corresponding ground truth depth map, making it directly applicable for training and evaluating depth estimation and depth completion models. It supports six popular depth cameras—Orbbec 335, 335L, and Intel RealSense D405, D415, D435, D455—facilitating better model generalization and evaluation across diverse devices and scenarios.
Ant Lingbo's previously open-sourced high-precision spatial perception model, LingBot-Depth, was trained using this dataset as its core data. Compared to mainstream industry methods like PromptDA and PriorDA, LingBot-Depth reduces depth prediction error by over 70% in indoor scenes and by approximately 47% in sparse depth completion tasks. When deployed, this model enables commercial depth cameras to produce more complete, smoother, and sharper depth maps in challenging conditions like transparent glass, reflective surfaces, and backlighting—all without hardware modifications. In certain scenarios, its performance rivals that of premium industrial-grade depth cameras.
For academic and research institutions, this open-source initiative lowers the barriers to data collection and annotation, accelerating the transition of spatial perception technologies from research to real-world application. As robotics and embodied intelligence rapidly integrate into physical environments, large-scale, high-quality datasets grounded in real-world data will become essential infrastructure for driving continued industry progress.
Related article
 UK Government Departments Clash Over Energy Needs for AI Data Centers
The UK government is grappling with a major challenge: advancing clean energy while aiming to become a global leader in artificial intelligence. Yet serious inconsistencies appear between the departments responsible for these goals. The Department fo
Cyberspace Administration of China mandates tagging of AI-generated and fictional short videos
The Cyberspace Administration of China has rolled out a comprehensive plan to standardize short video content labeling, mandating that platforms offer six required tags—including "AI-generated content"—ushering in a new era of mandatory transparency
DeepL, renowned for text translation, now targets voice translation
DeepL, a translation company best known for its text-based tools, has launched a voice-to-voice translation suite today that addresses scenarios such as meetings, mobile and web conversations, and group discussions for frontline workers through custo
Related Special Topic Recommendations
writing
UK Government Departments Clash Over Energy Needs for AI Data Centers
The UK government is grappling with a major challenge: advancing clean energy while aiming to become a global leader in artificial intelligence. Yet serious inconsistencies appear between the departments responsible for these goals. The Department fo
Cyberspace Administration of China mandates tagging of AI-generated and fictional short videos
The Cyberspace Administration of China has rolled out a comprehensive plan to standardize short video content labeling, mandating that platforms offer six required tags—including "AI-generated content"—ushering in a new era of mandatory transparency
DeepL, renowned for text translation, now targets voice translation
DeepL, a translation company best known for its text-based tools, has launched a voice-to-voice translation suite today that addresses scenarios such as meetings, mobile and web conversations, and group discussions for frontline workers through custo
Related Special Topic Recommendations
writing
 Top AI Fiction Profile Creators: Generate Consistent Character Motivations and Fatal Flaws
Top AI Fiction Profile Creators: Generate Consistent Character Motivations and Fatal Flaws
Discover the 2026 best AI fiction profile creators for crafting deep characters. XIX.AI's curated list features top-rated, game-changing tools that generate consistent motivations and fatal flaws. Compare free vs paid options with real-world tests. Unlock your storytelling potential now.
 10 tools
10 tools
 xix.ai
Business
Top AI Pricing Optimization Software: Track Competitors & Auto-Adjust Store Prices
xix.ai
Business
Top AI Pricing Optimization Software: Track Competitors & Auto-Adjust Store Prices
Discover the 2026 best AI pricing optimization software on XIX.AI. Our curated list features top-rated, game-changing tools that track competitors and auto-adjust your store prices for maximum profit. Compare free vs paid options with real-world tests. Unlock your pricing edge now.
10 tools
xix.ai
code
Best AI Code Reviewers: Automate Clean Code Compliance & Refactor Legacy Repo Files
Discover the 2026 best AI code reviewers on XIX.AI. Our curated list features top-rated, game-changing tools for automating clean code compliance and refactoring legacy repo files. Compare free vs paid options with real-world tests and weekly updated rankings. Unlock your AI edge today.
10 tools
xix.ai
Text-to-speech
Top AI TTS Apps for Dyslexia: Support Learning and Reading Efficiency for Students
Discover the 2026 latest top-rated AI TTS apps curated for dyslexia support. Our expert rankings compare free vs paid tools, highlighting powerful features for enhanced reading efficiency and learning. Explore must-try, game-changing solutions to unlock student potential. Start your journey at XIX.AI.
10 tools
xix.ai
Comic Creation
Top AI Generators for Shonen Manga: Create High-Octane Action Sequences & Energy Effects
Discover the 2026 best AI generators for Shonen manga at XIX.AI. Our top-rated, curated list features powerful tools for creating high-octane action sequences and dynamic energy effects. Compare free vs paid options with real-world tests. Unlock your creative potential and start crafting epic manga today!
15 tools
xix.ai
Business
Best AI Expense Trackers: Scan Receipts & Categorize Corporate Spend Automatically
2026 Latest Best AI Expense Trackers: Top-rated tools to scan receipts & categorize corporate spend automatically. Discover powerful, game-changing solutions for effortless expense management, accurate financial tracking, and streamlined compliance. Our curated, weekly-updated comparison of free vs paid options helps you find the perfect fit. Unlock your AI edge with XIX.AI's expert picks.
10 tools
xix.ai

 Comments (0)
0/500
Comments (0)
0/500
On March 31st, Ant Lingbo Technology officially open-sourced the large-scale RGB-D dataset, LingBot-Depth-Dataset. This collection contains 3 million high-quality sample pairs, with 2 million captured from real-world environments and 1 million synthetically rendered. Totaling 2.71TB, it encompasses data from six mainstream depth cameras, making it the largest open-source RGB-D dataset primarily based on real scenes. This release provides richer, more realistic data to advance research in embodied intelligence, spatial perception, and 3D vision.
(Image: A sample from the LingBot-Depth-Dataset. From top to bottom: the RGB image, the sensor's raw depth map, and the ground truth depth map. The dataset provides both raw and ground truth depth information, offering robust support for training and evaluating models in real-world conditions.)
Publicly available depth datasets have long faced challenges of limited scale, inadequate real-world scene coverage, and reliance on single hardware types. Many datasets are largely synthetic, exhibiting significant gaps compared to real sensor data in terms of noise patterns, depth holes, and material representation, which hinders the practical deployment of trained models.
The LingBot-Depth-Dataset effectively addresses this data gap in spatial perception by providing large-scale, real-scene captures. Each sample includes an RGB image, a raw sensor depth map, and a corresponding ground truth depth map, making it directly applicable for training and evaluating depth estimation and depth completion models. It supports six popular depth cameras—Orbbec 335, 335L, and Intel RealSense D405, D415, D435, D455—facilitating better model generalization and evaluation across diverse devices and scenarios.
Ant Lingbo's previously open-sourced high-precision spatial perception model, LingBot-Depth, was trained using this dataset as its core data. Compared to mainstream industry methods like PromptDA and PriorDA, LingBot-Depth reduces depth prediction error by over 70% in indoor scenes and by approximately 47% in sparse depth completion tasks. When deployed, this model enables commercial depth cameras to produce more complete, smoother, and sharper depth maps in challenging conditions like transparent glass, reflective surfaces, and backlighting—all without hardware modifications. In certain scenarios, its performance rivals that of premium industrial-grade depth cameras.
For academic and research institutions, this open-source initiative lowers the barriers to data collection and annotation, accelerating the transition of spatial perception technologies from research to real-world application. As robotics and embodied intelligence rapidly integrate into physical environments, large-scale, high-quality datasets grounded in real-world data will become essential infrastructure for driving continued industry progress.










 UK Government Departments Clash Over Energy Needs for AI Data Centers
The UK government is grappling with a major challenge: advancing clean energy while aiming to become a global leader in artificial intelligence. Yet serious inconsistencies appear between the departments responsible for these goals. The Department fo
UK Government Departments Clash Over Energy Needs for AI Data Centers
The UK government is grappling with a major challenge: advancing clean energy while aiming to become a global leader in artificial intelligence. Yet serious inconsistencies appear between the departments responsible for these goals. The Department fo
 Cyberspace Administration of China mandates tagging of AI-generated and fictional short videos
The Cyberspace Administration of China has rolled out a comprehensive plan to standardize short video content labeling, mandating that platforms offer six required tags—including "AI-generated content"—ushering in a new era of mandatory transparency
Cyberspace Administration of China mandates tagging of AI-generated and fictional short videos
The Cyberspace Administration of China has rolled out a comprehensive plan to standardize short video content labeling, mandating that platforms offer six required tags—including "AI-generated content"—ushering in a new era of mandatory transparency
 DeepL, renowned for text translation, now targets voice translation
DeepL, a translation company best known for its text-based tools, has launched a voice-to-voice translation suite today that addresses scenarios such as meetings, mobile and web conversations, and group discussions for frontline workers through custo
DeepL, renowned for text translation, now targets voice translation
DeepL, a translation company best known for its text-based tools, has launched a voice-to-voice translation suite today that addresses scenarios such as meetings, mobile and web conversations, and group discussions for frontline workers through custo
Discover the 2026 best AI fiction profile creators for crafting deep characters. XIX.AI's curated list features top-rated, game-changing tools that generate consistent motivations and fatal flaws. Compare free vs paid options with real-world tests. Unlock your storytelling potential now.
10 tools
xix.ai
Discover the 2026 best AI pricing optimization software on XIX.AI. Our curated list features top-rated, game-changing tools that track competitors and auto-adjust your store prices for maximum profit. Compare free vs paid options with real-world tests. Unlock your pricing edge now.
10 tools
xix.ai
Discover the 2026 best AI code reviewers on XIX.AI. Our curated list features top-rated, game-changing tools for automating clean code compliance and refactoring legacy repo files. Compare free vs paid options with real-world tests and weekly updated rankings. Unlock your AI edge today.
10 tools
xix.ai
Discover the 2026 latest top-rated AI TTS apps curated for dyslexia support. Our expert rankings compare free vs paid tools, highlighting powerful features for enhanced reading efficiency and learning. Explore must-try, game-changing solutions to unlock student potential. Start your journey at XIX.AI.
10 tools
xix.ai
Discover the 2026 best AI generators for Shonen manga at XIX.AI. Our top-rated, curated list features powerful tools for creating high-octane action sequences and dynamic energy effects. Compare free vs paid options with real-world tests. Unlock your creative potential and start crafting epic manga today!
15 tools
xix.ai

2026 Latest Best AI Expense Trackers: Top-rated tools to scan receipts & categorize corporate spend automatically. Discover powerful, game-changing solutions for effortless expense management, accurate financial tracking, and streamlined compliance. Our curated, weekly-updated comparison of free vs paid options helps you find the perfect fit. Unlock your AI edge with XIX.AI's expert picks.
10 tools
xix.ai













