
















 首页
首页蚂蚁森林LingBot发布开源数据集,包含6台摄像头拍摄的200万张真实样本,规模达2.7T
3月31日,蚂蚁凌博科技正式开源了大规模RGB-D数据集LingBot-Depth-Dataset。该数据集包含300万对高质量样本,其中200万对来自真实环境,100万对为合成渲染数据。 该数据集总容量达2.71TB,涵盖六款主流深度摄像头的数据,是迄今为止基于真实场景的最大规模开源RGB-D数据集。此次发布将提供更丰富、更真实的数据,以推动具身智能、空间感知和3D视觉领域的研究。
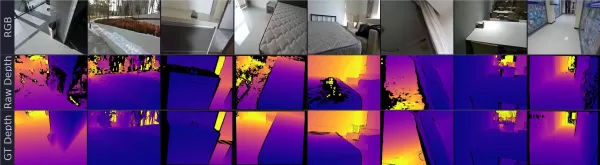
(图:LingBot-Depth-Dataset 的样本示例。从上至下依次为:RGB 图像、传感器原始深度图以及 ground truth 深度图。该数据集同时提供原始深度信息和 ground truth 深度信息,为在真实世界条件下训练和评估模型提供了强有力的支持。)
长期以来,公开的深度数据集一直面临规模有限、真实场景覆盖不足以及依赖单一硬件类型等挑战。许多数据集主要由合成数据构成,在噪声模式、深度缺失和材质表现等方面与真实传感器数据存在显著差距,这阻碍了训练模型的实际部署。
LingBot-Depth-Dataset 通过提供大规模的真实场景数据,有效填补了空间感知领域中的这一数据缺口。 每个样本包含一张RGB图像、一张原始传感器深度图以及一张对应的 ground truth 深度图,可直接用于训练和评估深度估计及深度补全模型。该数据集支持六款主流深度相机——Orbbec 335、335L 以及 Intel RealSense D405、D415、D435、D455,有助于提升模型在不同设备和场景下的泛化能力与评估效果。
Ant Lingbo此前开源的高精度空间感知模型LingBot-Depth,正是以该数据集为核心数据进行训练的。与PromptDA和PriorDA等主流行业方法相比,LingBot-Depth在室内场景中将深度预测误差降低了70%以上,在稀疏深度补全任务中降低了约47%。 该模型部署后,可使商用深度摄像头在透明玻璃、反光表面和逆光等严苛条件下生成更完整、更平滑、更清晰的深度图,且无需任何硬件改装。在某些场景下,其性能可媲美高端工业级深度摄像头。
对于学术和研究机构而言,这一开源项目降低了数据采集与标注的门槛,加速了空间感知技术从研究向实际应用的转化。随着机器人技术和具身智能迅速融入物理环境,基于真实世界数据的大规模高质量数据集将成为推动行业持续进步的关键基础设施。
相关文章
 ChatGPT成人模式再次推迟;奥特曼:优先考虑智能
OpenAI再次推迟推出备受争议的功能,转而专注于个性化和主动交互“不适当内容”是否应成为高效AI工具的一部分,这一问题在科技界早已引发热议。 OpenAI曾承诺让ChatGPT更好地理解成年用户,但再次令期待这一变革的人们失望。据IT之家报道,该公司近日确认,原定于2026年第一季度推出的所谓“成人模式”已再次推迟。这并非萨姆·阿尔特曼(Sam Altman)首次食言。早在2025年底,他就曾宣
百度健康近期内部测试了AI医生助手“DoctorClaw”,用于学术文献检索和日常办公辅助
据报道,百度健康已开始对一款专为医生设计的专业AI智能助手进行内部测试。该产品内部代号为“DoctorClaw”(龙虾医生版),标志着百度在医疗领域部署大型语言模型方面迈出了重要一步。知情人士透露,该项目仍处于封闭开发阶段,目前已进入内部测试。虽然具体的产品形态尚未完全披露,但已接近上线。 在功能方面,DoctorClaw初期将侧重于学术文献检索和常规诊疗辅助。但其长期战略旨在深度融入临床诊断、医
Cursor Composer 2 与 Claude Opus 4.6:基准测试引发新一轮人工智能编程争论
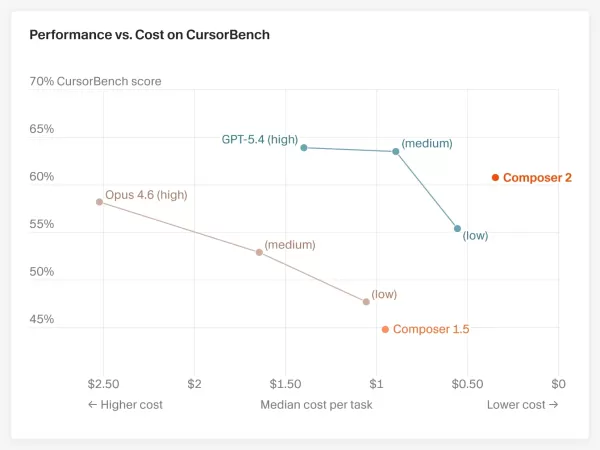
3月19日,Cursor正式发布了其自主研发的编程模型Composer 2。 这一消息在开发者社区中立即引发热议——据 Cursor 称,Composer 2 在 Terminal-Bench 2.0 测试中获得了 61.7% 的得分,在相同的测试条件下,这一成绩显著超过了 Claude Opus 4.6 的 58.0%。Anthropic的旗舰模型竟被自家IDE内置的模型超越?随着消息传开,相关
相关专题推荐
写作
ChatGPT成人模式再次推迟;奥特曼:优先考虑智能
OpenAI再次推迟推出备受争议的功能,转而专注于个性化和主动交互“不适当内容”是否应成为高效AI工具的一部分,这一问题在科技界早已引发热议。 OpenAI曾承诺让ChatGPT更好地理解成年用户,但再次令期待这一变革的人们失望。据IT之家报道,该公司近日确认,原定于2026年第一季度推出的所谓“成人模式”已再次推迟。这并非萨姆·阿尔特曼(Sam Altman)首次食言。早在2025年底,他就曾宣
百度健康近期内部测试了AI医生助手“DoctorClaw”,用于学术文献检索和日常办公辅助
据报道,百度健康已开始对一款专为医生设计的专业AI智能助手进行内部测试。该产品内部代号为“DoctorClaw”(龙虾医生版),标志着百度在医疗领域部署大型语言模型方面迈出了重要一步。知情人士透露,该项目仍处于封闭开发阶段,目前已进入内部测试。虽然具体的产品形态尚未完全披露,但已接近上线。 在功能方面,DoctorClaw初期将侧重于学术文献检索和常规诊疗辅助。但其长期战略旨在深度融入临床诊断、医
Cursor Composer 2 与 Claude Opus 4.6:基准测试引发新一轮人工智能编程争论
3月19日,Cursor正式发布了其自主研发的编程模型Composer 2。 这一消息在开发者社区中立即引发热议——据 Cursor 称,Composer 2 在 Terminal-Bench 2.0 测试中获得了 61.7% 的得分,在相同的测试条件下,这一成绩显著超过了 Claude Opus 4.6 的 58.0%。Anthropic的旗舰模型竟被自家IDE内置的模型超越?随着消息传开,相关
相关专题推荐
写作
 最适合广播和播客使用的AI脚本编写工具:帮助您创作引人入胜的音频广告
最适合广播和播客使用的AI脚本编写工具:帮助您创作引人入胜的音频广告
在XIX.AI上,发现2026年最适合用于广播和播客制作的AI脚本工具。我们精心挑选的这些高评分工具能够提供强大的功能,帮助您快速制作出引人入胜的音频广告。通过实际测试和每周更新的排名,您可以了解免费选项与付费选项之间的差异。今天就释放您的创造力吧!
 10 个工具
10 个工具
 xix.ai
商业
最佳 AI 合同审查软件:即时发现法律漏洞与合规风险
xix.ai
商业
最佳 AI 合同审查软件:即时发现法律漏洞与合规风险
在 XIX.AI 上探索 2026 年最佳 AI 合同审查软件。我们精心筛选的顶级榜单汇集了功能强大的工具,能够即时发现法律漏洞和合规风险。通过实际测试和每周更新的排名,对比免费与付费选项。找到能彻底改变游戏规则的解决方案,实现安全、高效的合同分析。立即探索这本权威指南。
10 个工具
xix.ai
动画创作
专为东华设计的AI动漫生成器:可用于创建网络小说角色及漫画头像
探索2026年最适合制作中文动画的人工智能工具。我们精心挑选的顶级列表中包含了各种强大的工具,能够帮助你创建出令人惊叹的网络小说角色和漫画头像。通过实际测试来对比免费选项和付费选项,找到最适合你的创作工具,今天就在XIX.AI上将你的故事变为现实吧。
10 个工具
xix.ai
漫画创作
漫画领域顶尖的AI自动上色工具:零一致性错误地应用平涂色彩
立即访问 XIX.AI,探索 2026 年最优秀的漫画 AI 自动上色工具。我们精心筛选的清单汇集了广受好评、颠覆行业的解决方案,这些工具能以零一致性错误的方式应用平涂色彩,从而大幅提升您的工作效率。通过免费版与付费版的对比分析、实际测试以及每周更新的排行榜,找到最适合您的工具。立即开启您的 AI 优势。
10 个工具
xix.ai
写作
顶尖 AI 角色设定生成器:生成一致的角色动机与致命缺陷
探索2026年最优秀的AI人物设定生成工具,助您塑造鲜活立体的角色。XIX.AI精心筛选的这份清单汇集了广受好评、颠覆传统的工具,能够生成具有内在逻辑的动机和致命缺陷。通过实际测试对比免费与付费选项。立即释放您的叙事潜能。
10 个工具
xix.ai
商业
顶级 AI 定价优化软件:追踪竞争对手并自动调整店铺价格
在 XIX.AI 上探索 2026 年最佳 AI 定价优化软件。我们精心挑选的清单汇集了备受好评、具有颠覆性意义的工具,这些工具不仅能追踪竞争对手,还能自动调整您的店铺价格,从而实现利润最大化。通过实际测试对比免费与付费选项。立即掌握您的定价优势。
10 个工具
xix.ai

 评论 (0)
0/500
评论 (0)
0/500
3月31日,蚂蚁凌博科技正式开源了大规模RGB-D数据集LingBot-Depth-Dataset。该数据集包含300万对高质量样本,其中200万对来自真实环境,100万对为合成渲染数据。 该数据集总容量达2.71TB,涵盖六款主流深度摄像头的数据,是迄今为止基于真实场景的最大规模开源RGB-D数据集。此次发布将提供更丰富、更真实的数据,以推动具身智能、空间感知和3D视觉领域的研究。
(图:LingBot-Depth-Dataset 的样本示例。从上至下依次为:RGB 图像、传感器原始深度图以及 ground truth 深度图。该数据集同时提供原始深度信息和 ground truth 深度信息,为在真实世界条件下训练和评估模型提供了强有力的支持。)
长期以来,公开的深度数据集一直面临规模有限、真实场景覆盖不足以及依赖单一硬件类型等挑战。许多数据集主要由合成数据构成,在噪声模式、深度缺失和材质表现等方面与真实传感器数据存在显著差距,这阻碍了训练模型的实际部署。
LingBot-Depth-Dataset 通过提供大规模的真实场景数据,有效填补了空间感知领域中的这一数据缺口。 每个样本包含一张RGB图像、一张原始传感器深度图以及一张对应的 ground truth 深度图,可直接用于训练和评估深度估计及深度补全模型。该数据集支持六款主流深度相机——Orbbec 335、335L 以及 Intel RealSense D405、D415、D435、D455,有助于提升模型在不同设备和场景下的泛化能力与评估效果。
Ant Lingbo此前开源的高精度空间感知模型LingBot-Depth,正是以该数据集为核心数据进行训练的。与PromptDA和PriorDA等主流行业方法相比,LingBot-Depth在室内场景中将深度预测误差降低了70%以上,在稀疏深度补全任务中降低了约47%。 该模型部署后,可使商用深度摄像头在透明玻璃、反光表面和逆光等严苛条件下生成更完整、更平滑、更清晰的深度图,且无需任何硬件改装。在某些场景下,其性能可媲美高端工业级深度摄像头。
对于学术和研究机构而言,这一开源项目降低了数据采集与标注的门槛,加速了空间感知技术从研究向实际应用的转化。随着机器人技术和具身智能迅速融入物理环境,基于真实世界数据的大规模高质量数据集将成为推动行业持续进步的关键基础设施。










 ChatGPT成人模式再次推迟;奥特曼:优先考虑智能
OpenAI再次推迟推出备受争议的功能,转而专注于个性化和主动交互“不适当内容”是否应成为高效AI工具的一部分,这一问题在科技界早已引发热议。 OpenAI曾承诺让ChatGPT更好地理解成年用户,但再次令期待这一变革的人们失望。据IT之家报道,该公司近日确认,原定于2026年第一季度推出的所谓“成人模式”已再次推迟。这并非萨姆·阿尔特曼(Sam Altman)首次食言。早在2025年底,他就曾宣
ChatGPT成人模式再次推迟;奥特曼:优先考虑智能
OpenAI再次推迟推出备受争议的功能,转而专注于个性化和主动交互“不适当内容”是否应成为高效AI工具的一部分,这一问题在科技界早已引发热议。 OpenAI曾承诺让ChatGPT更好地理解成年用户,但再次令期待这一变革的人们失望。据IT之家报道,该公司近日确认,原定于2026年第一季度推出的所谓“成人模式”已再次推迟。这并非萨姆·阿尔特曼(Sam Altman)首次食言。早在2025年底,他就曾宣
 百度健康近期内部测试了AI医生助手“DoctorClaw”,用于学术文献检索和日常办公辅助
据报道,百度健康已开始对一款专为医生设计的专业AI智能助手进行内部测试。该产品内部代号为“DoctorClaw”(龙虾医生版),标志着百度在医疗领域部署大型语言模型方面迈出了重要一步。知情人士透露,该项目仍处于封闭开发阶段,目前已进入内部测试。虽然具体的产品形态尚未完全披露,但已接近上线。 在功能方面,DoctorClaw初期将侧重于学术文献检索和常规诊疗辅助。但其长期战略旨在深度融入临床诊断、医
百度健康近期内部测试了AI医生助手“DoctorClaw”,用于学术文献检索和日常办公辅助
据报道,百度健康已开始对一款专为医生设计的专业AI智能助手进行内部测试。该产品内部代号为“DoctorClaw”(龙虾医生版),标志着百度在医疗领域部署大型语言模型方面迈出了重要一步。知情人士透露,该项目仍处于封闭开发阶段,目前已进入内部测试。虽然具体的产品形态尚未完全披露,但已接近上线。 在功能方面,DoctorClaw初期将侧重于学术文献检索和常规诊疗辅助。但其长期战略旨在深度融入临床诊断、医
 Cursor Composer 2 与 Claude Opus 4.6:基准测试引发新一轮人工智能编程争论
3月19日,Cursor正式发布了其自主研发的编程模型Composer 2。 这一消息在开发者社区中立即引发热议——据 Cursor 称,Composer 2 在 Terminal-Bench 2.0 测试中获得了 61.7% 的得分,在相同的测试条件下,这一成绩显著超过了 Claude Opus 4.6 的 58.0%。Anthropic的旗舰模型竟被自家IDE内置的模型超越?随着消息传开,相关
Cursor Composer 2 与 Claude Opus 4.6:基准测试引发新一轮人工智能编程争论
3月19日,Cursor正式发布了其自主研发的编程模型Composer 2。 这一消息在开发者社区中立即引发热议——据 Cursor 称,Composer 2 在 Terminal-Bench 2.0 测试中获得了 61.7% 的得分,在相同的测试条件下,这一成绩显著超过了 Claude Opus 4.6 的 58.0%。Anthropic的旗舰模型竟被自家IDE内置的模型超越?随着消息传开,相关
在XIX.AI上,发现2026年最适合用于广播和播客制作的AI脚本工具。我们精心挑选的这些高评分工具能够提供强大的功能,帮助您快速制作出引人入胜的音频广告。通过实际测试和每周更新的排名,您可以了解免费选项与付费选项之间的差异。今天就释放您的创造力吧!
10 个工具
xix.ai
在 XIX.AI 上探索 2026 年最佳 AI 合同审查软件。我们精心筛选的顶级榜单汇集了功能强大的工具,能够即时发现法律漏洞和合规风险。通过实际测试和每周更新的排名,对比免费与付费选项。找到能彻底改变游戏规则的解决方案,实现安全、高效的合同分析。立即探索这本权威指南。
10 个工具
xix.ai
探索2026年最适合制作中文动画的人工智能工具。我们精心挑选的顶级列表中包含了各种强大的工具,能够帮助你创建出令人惊叹的网络小说角色和漫画头像。通过实际测试来对比免费选项和付费选项,找到最适合你的创作工具,今天就在XIX.AI上将你的故事变为现实吧。
10 个工具
xix.ai
立即访问 XIX.AI,探索 2026 年最优秀的漫画 AI 自动上色工具。我们精心筛选的清单汇集了广受好评、颠覆行业的解决方案,这些工具能以零一致性错误的方式应用平涂色彩,从而大幅提升您的工作效率。通过免费版与付费版的对比分析、实际测试以及每周更新的排行榜,找到最适合您的工具。立即开启您的 AI 优势。
10 个工具
xix.ai
探索2026年最优秀的AI人物设定生成工具,助您塑造鲜活立体的角色。XIX.AI精心筛选的这份清单汇集了广受好评、颠覆传统的工具,能够生成具有内在逻辑的动机和致命缺陷。通过实际测试对比免费与付费选项。立即释放您的叙事潜能。
10 个工具
xix.ai

在 XIX.AI 上探索 2026 年最佳 AI 定价优化软件。我们精心挑选的清单汇集了备受好评、具有颠覆性意义的工具,这些工具不仅能追踪竞争对手,还能自动调整您的店铺价格,从而实现利润最大化。通过实际测试对比免费与付费选项。立即掌握您的定价优势。
10 个工具
xix.ai













