
















 Maison
Maison
Ant Forest LingBot dévoile un ensemble de données open source de 2,7 To comprenant 2 millions d'échantillons réels capturés par 6 caméras
Le 31 mars, Ant Lingbo Technology a officiellement mis en open source le jeu de données RGB-D à grande échelle LingBot-Depth-Dataset. Cette collection contient 3 millions de paires d'échantillons de haute qualité, dont 2 millions ont été capturés dans des environnements réels et 1 million générés de manière synthétique. D'un volume total de 2,71 To, il regroupe des données provenant de six caméras de profondeur courantes, ce qui en fait le plus grand ensemble de données RGB-D open source principalement basé sur des scènes réelles. Cette publication fournit des données plus riches et plus réalistes pour faire progresser la recherche dans les domaines de l'intelligence incarnée, de la perception spatiale et de la vision 3D.
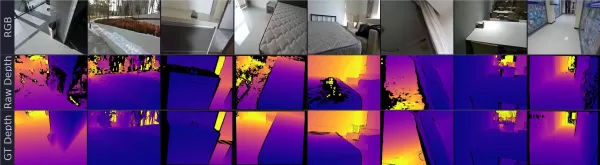
(Image : un échantillon tiré du LingBot-Depth-Dataset. De haut en bas : l'image RVB, la carte de profondeur brute du capteur et la carte de profondeur de référence. L'ensemble de données fournit à la fois des informations de profondeur brutes et de référence, offrant un soutien solide pour l'entraînement et l'évaluation de modèles dans des conditions réelles.)
Les ensembles de données de profondeur accessibles au public sont depuis longtemps confrontés à des défis liés à leur échelle limitée, à une couverture insuffisante des scènes du monde réel et à leur dépendance à l'égard d'un seul type de matériel. De nombreux ensembles de données sont en grande partie synthétiques, présentant des lacunes importantes par rapport aux données de capteurs réels en termes de modèles de bruit, de trous de profondeur et de représentation des matériaux, ce qui entrave le déploiement pratique des modèles entraînés.
Le LingBot-Depth-Dataset comble efficacement cette lacune en matière de perception spatiale en fournissant des captures de scènes réelles à grande échelle. Chaque échantillon comprend une image RVB, une carte de profondeur brute du capteur et une carte de profondeur de référence correspondante, ce qui le rend directement applicable pour l'entraînement et l'évaluation de modèles d'estimation et de complétion de profondeur. Il prend en charge six caméras de profondeur courantes — Orbbec 335, 335L, et Intel RealSense D405, D415, D435, D455 — facilitant une meilleure généralisation et évaluation des modèles sur divers appareils et scénarios.
Le modèle de perception spatiale de haute précision précédemment open source d’Ant Lingbo, LingBot-Depth, a été entraîné en utilisant cet ensemble de données comme données de base. Par rapport aux méthodes courantes du secteur telles que PromptDA et PriorDA, LingBot-Depth réduit l’erreur de prédiction de profondeur de plus de 70 % dans les scènes d’intérieur et d’environ 47 % dans les tâches de complétion de profondeur clairsemée. Une fois déployé, ce modèle permet aux caméras de profondeur commerciales de produire des cartes de profondeur plus complètes, plus fluides et plus nettes dans des conditions difficiles telles que la présence de verre transparent, de surfaces réfléchissantes et de contre-jour, le tout sans aucune modification matérielle. Dans certains scénarios, ses performances rivalisent avec celles des caméras de profondeur haut de gamme de qualité industrielle.
Pour les établissements universitaires et de recherche, cette initiative open source réduit les obstacles à la collecte et à l'annotation des données, accélérant ainsi la transition des technologies de perception spatiale de la recherche vers des applications concrètes. À mesure que la robotique et l'intelligence incarnée s'intègrent rapidement dans les environnements physiques, des ensembles de données à grande échelle et de haute qualité, fondés sur des données du monde réel, deviendront une infrastructure essentielle pour stimuler les progrès continus du secteur.
Article connexe
 ElevenLabs annonce que BlackRock, Jamie Foxx et Eva Longoria ont rejoint le cercle de ses investisseurs
ElevenLabs, la société spécialisée dans l'IA vocale, a révélé le nom d'investisseurs supplémentaires ayant participé à son tour de table de série D de 500 millions de dollars, initialement annoncé en
Sam Altman, PDG d'OpenAI, fustige Anthropic pour ses stratégies marketing fondées sur la peur
Le conflit public qui oppose actuellement les géants de l'IA OpenAI et Anthropic s'est intensifié. Sam Altman, PDG d'OpenAI, a récemment remis en cause le dernier modèle de sécurité de
La start-up de codage Cursor AI prévoit d'embaucher 200 personnes dans la région Asie-Pacifique après avoir reçu un investissement important de la part de SpaceX
La start-up spécialisée dans le codage IA Cursor a annoncé une expansion mondiale majeure, prévoyant de recruter 200 collaborateurs dans la région Asie-Pacifique au cours des six prochains mois. Les p
Recommandations de sujets spéciaux liés
Création d'animations
ElevenLabs annonce que BlackRock, Jamie Foxx et Eva Longoria ont rejoint le cercle de ses investisseurs
ElevenLabs, la société spécialisée dans l'IA vocale, a révélé le nom d'investisseurs supplémentaires ayant participé à son tour de table de série D de 500 millions de dollars, initialement annoncé en
Sam Altman, PDG d'OpenAI, fustige Anthropic pour ses stratégies marketing fondées sur la peur
Le conflit public qui oppose actuellement les géants de l'IA OpenAI et Anthropic s'est intensifié. Sam Altman, PDG d'OpenAI, a récemment remis en cause le dernier modèle de sécurité de
La start-up de codage Cursor AI prévoit d'embaucher 200 personnes dans la région Asie-Pacifique après avoir reçu un investissement important de la part de SpaceX
La start-up spécialisée dans le codage IA Cursor a annoncé une expansion mondiale majeure, prévoyant de recruter 200 collaborateurs dans la région Asie-Pacifique au cours des six prochains mois. Les p
Recommandations de sujets spéciaux liés
Création d'animations
 Generateur d'animation AI pour Donghua : Créer des personnages de romans web et des avatars de bandes dessinées
Generateur d'animation AI pour Donghua : Créer des personnages de romans web et des avatars de bandes dessinées
Découvrez les meilleurs générateurs d’animés AI de 2026 pour la création de doublages en chinois. Notre liste, sélectionnée avec soin, propose des outils puissants pour créer des personnages incroyables pour des romans web et des avatars de comics. Comparez les options gratuites et payantes grâce à des tests réels. Trouvez le partenaire créatif idéal et donnez vie à vos histoires dès aujourd’hui sur XIX.AI.
 10 outils
10 outils
 xix.ai
Création de bande dessinée
Les meilleurs outils d'auto-coloration IA pour les mangas : appliquez des couleurs unies sans aucune erreur de cohérence
xix.ai
Création de bande dessinée
Les meilleurs outils d'auto-coloration IA pour les mangas : appliquez des couleurs unies sans aucune erreur de cohérence
Découvrez les meilleurs outils d'auto-coloration IA pour mangas de 2026 sur XIX.AI. Notre sélection regroupe des solutions de premier plan qui changent la donne : elles appliquent des couleurs unies sans aucune erreur de cohérence, ce qui booste votre productivité. Consultez nos comparatifs entre versions gratuites et payantes, nos tests en conditions réelles et nos classements mis à jour chaque semaine pour trouver l'outil qui vous convient le mieux. Profitez dès aujourd'hui de l'avantage de l'IA.
10 outils
xix.ai
en écrivant
Les meilleurs créateurs de profils de fiction basés sur l'IA : générer des motivations de personnages cohérentes et des faiblesses fatales
Découvrez les meilleurs outils de création de profils de personnages basés sur l'IA de 2026 pour donner de la profondeur à vos personnages. La sélection de XIX.AI regroupe les outils les mieux notés et les plus innovants, capables de générer des motivations cohérentes et des défauts fatals. Comparez les options gratuites et payantes grâce à des tests concrets. Libérez dès maintenant votre potentiel de narration.
10 outils
xix.ai
Entreprise
Les meilleurs logiciels d'optimisation des prix basés sur l'IA : suivez vos concurrents et ajustez automatiquement les prix de votre boutique
Découvrez les meilleurs logiciels d'optimisation des prix basés sur l'IA pour 2026 sur XIX.AI. Notre sélection comprend des outils de premier plan qui changent la donne : ils surveillent vos concurrents et ajustent automatiquement les prix de votre boutique pour maximiser vos bénéfices. Comparez les options gratuites et payantes grâce à des tests concrets. Prenez dès maintenant une longueur d'avance en matière de tarification.
10 outils
xix.ai
code
Les meilleurs outils d'analyse de code basés sur l'IA : automatisez la conformité au code propre et refactorisez les fichiers des dépôts hérités
Découvrez les meilleurs outils d'analyse de code par IA de 2026 sur XIX.AI. Notre sélection comprend des outils de premier plan, véritables révolutionnaires, permettant d'automatiser la conformité au code propre et de refactoriser les fichiers de dépôts hérités. Comparez les options gratuites et payantes grâce à des tests concrets et à des classements mis à jour chaque semaine. Prenez dès aujourd'hui une longueur d'avance grâce à l'IA.
10 outils
xix.ai
Synthèse vocale
Les meilleures applications de synthèse vocale basées sur l'IA pour la dyslexie : un soutien à l'apprentissage et à l'efficacité en lecture pour les élèves
Découvrez les meilleures applications de synthèse vocale par IA de 2026, spécialement sélectionnées pour aider les personnes dyslexiques. Notre classement d'experts compare les outils gratuits et payants, en mettant en avant des fonctionnalités performantes qui améliorent l'efficacité de la lecture et l'apprentissage. Découvrez des solutions révolutionnaires à ne pas manquer pour libérer le potentiel des élèves. Commencez votre parcours sur XIX.AI.
10 outils
xix.ai

 commentaires (0)
commentaires (0)
Le 31 mars, Ant Lingbo Technology a officiellement mis en open source le jeu de données RGB-D à grande échelle LingBot-Depth-Dataset. Cette collection contient 3 millions de paires d'échantillons de haute qualité, dont 2 millions ont été capturés dans des environnements réels et 1 million générés de manière synthétique. D'un volume total de 2,71 To, il regroupe des données provenant de six caméras de profondeur courantes, ce qui en fait le plus grand ensemble de données RGB-D open source principalement basé sur des scènes réelles. Cette publication fournit des données plus riches et plus réalistes pour faire progresser la recherche dans les domaines de l'intelligence incarnée, de la perception spatiale et de la vision 3D.
(Image : un échantillon tiré du LingBot-Depth-Dataset. De haut en bas : l'image RVB, la carte de profondeur brute du capteur et la carte de profondeur de référence. L'ensemble de données fournit à la fois des informations de profondeur brutes et de référence, offrant un soutien solide pour l'entraînement et l'évaluation de modèles dans des conditions réelles.)
Les ensembles de données de profondeur accessibles au public sont depuis longtemps confrontés à des défis liés à leur échelle limitée, à une couverture insuffisante des scènes du monde réel et à leur dépendance à l'égard d'un seul type de matériel. De nombreux ensembles de données sont en grande partie synthétiques, présentant des lacunes importantes par rapport aux données de capteurs réels en termes de modèles de bruit, de trous de profondeur et de représentation des matériaux, ce qui entrave le déploiement pratique des modèles entraînés.
Le LingBot-Depth-Dataset comble efficacement cette lacune en matière de perception spatiale en fournissant des captures de scènes réelles à grande échelle. Chaque échantillon comprend une image RVB, une carte de profondeur brute du capteur et une carte de profondeur de référence correspondante, ce qui le rend directement applicable pour l'entraînement et l'évaluation de modèles d'estimation et de complétion de profondeur. Il prend en charge six caméras de profondeur courantes — Orbbec 335, 335L, et Intel RealSense D405, D415, D435, D455 — facilitant une meilleure généralisation et évaluation des modèles sur divers appareils et scénarios.
Le modèle de perception spatiale de haute précision précédemment open source d’Ant Lingbo, LingBot-Depth, a été entraîné en utilisant cet ensemble de données comme données de base. Par rapport aux méthodes courantes du secteur telles que PromptDA et PriorDA, LingBot-Depth réduit l’erreur de prédiction de profondeur de plus de 70 % dans les scènes d’intérieur et d’environ 47 % dans les tâches de complétion de profondeur clairsemée. Une fois déployé, ce modèle permet aux caméras de profondeur commerciales de produire des cartes de profondeur plus complètes, plus fluides et plus nettes dans des conditions difficiles telles que la présence de verre transparent, de surfaces réfléchissantes et de contre-jour, le tout sans aucune modification matérielle. Dans certains scénarios, ses performances rivalisent avec celles des caméras de profondeur haut de gamme de qualité industrielle.
Pour les établissements universitaires et de recherche, cette initiative open source réduit les obstacles à la collecte et à l'annotation des données, accélérant ainsi la transition des technologies de perception spatiale de la recherche vers des applications concrètes. À mesure que la robotique et l'intelligence incarnée s'intègrent rapidement dans les environnements physiques, des ensembles de données à grande échelle et de haute qualité, fondés sur des données du monde réel, deviendront une infrastructure essentielle pour stimuler les progrès continus du secteur.










 ElevenLabs annonce que BlackRock, Jamie Foxx et Eva Longoria ont rejoint le cercle de ses investisseurs
ElevenLabs, la société spécialisée dans l'IA vocale, a révélé le nom d'investisseurs supplémentaires ayant participé à son tour de table de série D de 500 millions de dollars, initialement annoncé en
ElevenLabs annonce que BlackRock, Jamie Foxx et Eva Longoria ont rejoint le cercle de ses investisseurs
ElevenLabs, la société spécialisée dans l'IA vocale, a révélé le nom d'investisseurs supplémentaires ayant participé à son tour de table de série D de 500 millions de dollars, initialement annoncé en
 Sam Altman, PDG d'OpenAI, fustige Anthropic pour ses stratégies marketing fondées sur la peur
Le conflit public qui oppose actuellement les géants de l'IA OpenAI et Anthropic s'est intensifié. Sam Altman, PDG d'OpenAI, a récemment remis en cause le dernier modèle de sécurité de
Sam Altman, PDG d'OpenAI, fustige Anthropic pour ses stratégies marketing fondées sur la peur
Le conflit public qui oppose actuellement les géants de l'IA OpenAI et Anthropic s'est intensifié. Sam Altman, PDG d'OpenAI, a récemment remis en cause le dernier modèle de sécurité de
 La start-up de codage Cursor AI prévoit d'embaucher 200 personnes dans la région Asie-Pacifique après avoir reçu un investissement important de la part de SpaceX
La start-up spécialisée dans le codage IA Cursor a annoncé une expansion mondiale majeure, prévoyant de recruter 200 collaborateurs dans la région Asie-Pacifique au cours des six prochains mois. Les p
La start-up de codage Cursor AI prévoit d'embaucher 200 personnes dans la région Asie-Pacifique après avoir reçu un investissement important de la part de SpaceX
La start-up spécialisée dans le codage IA Cursor a annoncé une expansion mondiale majeure, prévoyant de recruter 200 collaborateurs dans la région Asie-Pacifique au cours des six prochains mois. Les p
Découvrez les meilleurs générateurs d’animés AI de 2026 pour la création de doublages en chinois. Notre liste, sélectionnée avec soin, propose des outils puissants pour créer des personnages incroyables pour des romans web et des avatars de comics. Comparez les options gratuites et payantes grâce à des tests réels. Trouvez le partenaire créatif idéal et donnez vie à vos histoires dès aujourd’hui sur XIX.AI.
10 outils
xix.ai
Découvrez les meilleurs outils d'auto-coloration IA pour mangas de 2026 sur XIX.AI. Notre sélection regroupe des solutions de premier plan qui changent la donne : elles appliquent des couleurs unies sans aucune erreur de cohérence, ce qui booste votre productivité. Consultez nos comparatifs entre versions gratuites et payantes, nos tests en conditions réelles et nos classements mis à jour chaque semaine pour trouver l'outil qui vous convient le mieux. Profitez dès aujourd'hui de l'avantage de l'IA.
10 outils
xix.ai
Découvrez les meilleurs outils de création de profils de personnages basés sur l'IA de 2026 pour donner de la profondeur à vos personnages. La sélection de XIX.AI regroupe les outils les mieux notés et les plus innovants, capables de générer des motivations cohérentes et des défauts fatals. Comparez les options gratuites et payantes grâce à des tests concrets. Libérez dès maintenant votre potentiel de narration.
10 outils
xix.ai
Découvrez les meilleurs logiciels d'optimisation des prix basés sur l'IA pour 2026 sur XIX.AI. Notre sélection comprend des outils de premier plan qui changent la donne : ils surveillent vos concurrents et ajustent automatiquement les prix de votre boutique pour maximiser vos bénéfices. Comparez les options gratuites et payantes grâce à des tests concrets. Prenez dès maintenant une longueur d'avance en matière de tarification.
10 outils
xix.ai
Découvrez les meilleurs outils d'analyse de code par IA de 2026 sur XIX.AI. Notre sélection comprend des outils de premier plan, véritables révolutionnaires, permettant d'automatiser la conformité au code propre et de refactoriser les fichiers de dépôts hérités. Comparez les options gratuites et payantes grâce à des tests concrets et à des classements mis à jour chaque semaine. Prenez dès aujourd'hui une longueur d'avance grâce à l'IA.
10 outils
xix.ai
Découvrez les meilleures applications de synthèse vocale par IA de 2026, spécialement sélectionnées pour aider les personnes dyslexiques. Notre classement d'experts compare les outils gratuits et payants, en mettant en avant des fonctionnalités performantes qui améliorent l'efficacité de la lecture et l'apprentissage. Découvrez des solutions révolutionnaires à ne pas manquer pour libérer le potentiel des élèves. Commencez votre parcours sur XIX.AI.
10 outils
xix.ai













