
















 首页
首页Generalist 发布面向物理系统的通用人工智能模型 GEN-1
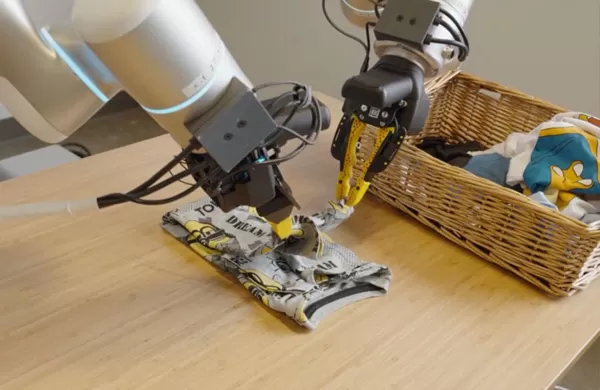
为了开发GEN-1,Generalist增强了训练稳定性,创建了定制内核,设计了用于实时推理的创新分页注意力方法,优化了训练后技术,并改进了控制系统以实现更流畅、更精确的操作。| 来源:Generalist AI
Generalist AI公司昨日发布了其面向机器人领域的通用AI模型GEN-1。该公司表示,该系统将平均任务成功率提升至99%,而此前模型的成功率仅为64%。据Generalist称,该系统完成任务的速度约为当前方法的三倍,且每项任务仅需一小时的机器人数据即可实现这些成果。
该公司成立于2024年,致力于为多功能机器人开发具身基础模型。总部位于加利福尼亚州圣马特奥的Generalist宣称,GEN-1“为广泛的应用领域解锁了商业可行性”。此次发布距离其GEN-0模型发布仅五个月,该公司曾表示GEN-0证实了机器人领域存在规模定律。
尽管对该AI模型的进步持乐观态度,Generalist也承认GEN-1无法解决所有任务。这家初创公司补充道,某些实际应用需要超过99%的成功率才能真正发挥实用价值。
编者按:5月27日至28日在波士顿举行的2026年机器人峰会暨博览会(Robotics Summit & Expo)将重点呈现关于具身与物理人工智能开发的专题会议。现已开放注册。
GEN-1基于真实世界数据进行训练,是在GEN-0基础上实现规模化升级
Generalist AI解释称,GEN-1在GEN-0的基础上通过进一步扩展和算法改进,开始掌握基础任务。该模型完全基于该公司包含50万小时真实世界数据的数据集从头开始训练。
通过GEN-0,Generalist证明了机器人学习可以像语言模型那样以可预测的方式实现泛化扩展。该公司指出,其监测的每一项零样本任务都同时取得了进步。不过,该公司也承认该模型的性能“尚不足以进行商业部署”。
Generalist表示,GEN-1是数据和计算规模扩大的成果,并得益于算法突破的加速。该公司报告称,部分任务现已达到经济上可行的实际应用所需的性能门槛。
该公司指出,此前成功率超过90%的通用机器人模型,均依赖于庞大、昂贵且难以扩展的遥操作数据集。相比之下,GEN-0和GEN-1的基础模型在训练过程中并未使用任何机器人专用数据。
取而代之的是,该模型利用了人类在执行数百万种活动时佩戴的低成本可穿戴设备所采集的数据。Generalist表示,他们已证明这种预训练方法无需依赖大型遥操作或模拟数据集,即可实现高水平的掌握能力。
Generalist 融合了多项技术领域的最新进展
据 Generalist AI 介绍,GEN-1 融合了提升计算效率的预训练创新技术。后训练技术、基于经验的学习(强化学习)、多模态人类引导以及新型推理时方法的进步,也共同推动了其在各类任务中的性能提升。
除上述改进外,该公司表示与前代产品相比,GEN-1的计算规模实现了显著提升。Generalist指出:“它展现了快速学习新任务、适应新环境以及展现物理常识的能力。”
该公司声称 GEN-1 是一款数据高效的学习者。在某些测试中,该模型仅使用十分之一任务专用数据和更少的微调步骤,便实现了与 GEN-0 相当的性能。
Generalist解释道,由于预训练数据集不含机器人数据,当GEN-1适应新任务时,它实际上是在首次同时学习具体的机器人形态和任务本身。
GEN-1 提升了可靠性和即兴智能
“具身基础模型必须可靠、快速,并能从意外情况中恢复,”Generalist表示。关于可靠性,该公司指出GEN-1可在长时间内以高可靠性水平执行多项任务,且无需人工干预。
该公司展示了 GEN-1 在六项任务中的表现:组装汽车零部件超过一小时、连续折叠 T 恤 86 次、连续维护扫地机器人 200 多次、连续打包积木 1,800 多次、连续折叠纸箱 200 多次,以及不间断地打包手机 100 多次。
未经预训练、从零开始训练的任务表现欠佳,平均成功率仅为19%。针对这些任务进行微调的GEN-0模型成功率达到64%。Generalist表示,GEN-1实现了生产级别的成功率,平均达99%。
Generalist表示,这些模型能够对不可预见的场景做出创造性响应。以汽车零部件套件组装为例,如果垫片因碰撞而偏离正确位置,机器人可以将其放下重新抓取,将其部分插入缝隙以展现外在灵巧性,甚至使用另一只手进行双手法内重新抓取。
Generalist 表示,若 T 恤等大型可变形物体出现意外变形,模型也能自行推导出恢复方案。该公司指出:“这些行为完全超出了训练数据分布范围,直接有助于从罕见且意外的事件中恢复。”
Generalist模型加速任务完成
Generalist AI表示,GEN-1完成演示任务的速度约为当前最先进水平(SOTA)的三倍。该模型能够动态应对新的物体物理特性。
例如,GEN-1能在12.1秒内组装一个纸箱。Generalist称这比之前的SOTA快2.8倍——GEN-0和π0在组装相同纸箱时均耗时约34秒。GEN-1还能在15.5秒内将手机装入手机壳,其运行速度是GEN-0的2.8倍。
据 Generalist 介绍,多项技术组件促成了这些速度提升。这些模型通过经验学习,并借助谐波推理(Harmonic Reasoning)实现了推理能力的进化。
该公司还特别指出,其数据采集设备为模型提供了海量的预训练数据——这些数据来自以高速完成各类任务的过程,从而实现了从通用场景到相关动态的知识迁移。Generalist将此与传统遥操作系统进行了对比,后者因缺乏力反馈、存在延迟及可视性问题,自然会产生速度更慢、更不流畅的数据。
“构建GEN-1充满挑战——我们重新设计了分布式训练基础设施,以原生支持 petabytes 级别的物理交互数据,”Generalist AI 表示。该公司宣布,早期访问合作伙伴现可获取该模型。
相关文章
 MoveIt Pro 9.0 升级版:感知与遥操作功能全面增强
据PickNik介绍,MoveIt Pro 9.0使机器人能够在几何结构不断变化且表面多样化的环境中高效工作。| 来源:PickNik RoboticsPickNik公司推出了MoveIt Pro 9.0,这是其用于构建机械臂应用程序平台的最新版本。此次更新引入了改进的感知到动作功能,并针对遥操作和训练数据采集系统进行了全面重新设计。这家总部位于科罗拉多州博尔德的公司表示,这些增强功能将帮助开发者
SS Innovations 开发出用于无人机配送的外科手术机器人
SSi Vimana 航空无人机系统旨在将关键医疗救护直接送达战场上的伤员。| 来源:SS Innovations InternationalSS Innovations International Inc. 近日在印度新德里举办的“全球多专科机器人手术大会”上,展示了四款目前正在研发中的外科机器人系统。这些新平台包括 SSi Vimana 航空无人机系统、SSi Avtara 类人外科平台、SS
Pebble Time 2最终设计揭晓
随着Pebble回归初心,我们终于得以一睹即将面世的Pebble Time 2真容,该产品计划于今年晚些时候发货。(今年三月曾有过初步设计曝光,但当时仍属雏形阶段。)Core Devices首席执行官埃里克·米吉科夫斯基今日通过个人博客及YouTube频道公布了设计方案。Time 2将提供四种配色选择,但最终方案尚未确定——米吉科夫斯基强调公司正积极征集Pebble社区的反馈意见。 手表将采用不锈
相关专题推荐
商业
MoveIt Pro 9.0 升级版:感知与遥操作功能全面增强
据PickNik介绍,MoveIt Pro 9.0使机器人能够在几何结构不断变化且表面多样化的环境中高效工作。| 来源:PickNik RoboticsPickNik公司推出了MoveIt Pro 9.0,这是其用于构建机械臂应用程序平台的最新版本。此次更新引入了改进的感知到动作功能,并针对遥操作和训练数据采集系统进行了全面重新设计。这家总部位于科罗拉多州博尔德的公司表示,这些增强功能将帮助开发者
SS Innovations 开发出用于无人机配送的外科手术机器人
SSi Vimana 航空无人机系统旨在将关键医疗救护直接送达战场上的伤员。| 来源:SS Innovations InternationalSS Innovations International Inc. 近日在印度新德里举办的“全球多专科机器人手术大会”上,展示了四款目前正在研发中的外科机器人系统。这些新平台包括 SSi Vimana 航空无人机系统、SSi Avtara 类人外科平台、SS
Pebble Time 2最终设计揭晓
随着Pebble回归初心,我们终于得以一睹即将面世的Pebble Time 2真容,该产品计划于今年晚些时候发货。(今年三月曾有过初步设计曝光,但当时仍属雏形阶段。)Core Devices首席执行官埃里克·米吉科夫斯基今日通过个人博客及YouTube频道公布了设计方案。Time 2将提供四种配色选择,但最终方案尚未确定——米吉科夫斯基强调公司正积极征集Pebble社区的反馈意见。 手表将采用不锈
相关专题推荐
商业
 最佳 AI 合同审查软件:即时发现法律漏洞与合规风险
最佳 AI 合同审查软件:即时发现法律漏洞与合规风险
在 XIX.AI 上探索 2026 年最佳 AI 合同审查软件。我们精心筛选的顶级榜单汇集了功能强大的工具,能够即时发现法律漏洞和合规风险。通过实际测试和每周更新的排名,对比免费与付费选项。找到能彻底改变游戏规则的解决方案,实现安全、高效的合同分析。立即探索这本权威指南。
 10 个工具
10 个工具
 xix.ai
动画创作
专为东华设计的AI动漫生成器:可用于创建网络小说角色及漫画头像
xix.ai
动画创作
专为东华设计的AI动漫生成器:可用于创建网络小说角色及漫画头像
探索2026年最适合制作中文动画的人工智能工具。我们精心挑选的顶级列表中包含了各种强大的工具,能够帮助你创建出令人惊叹的网络小说角色和漫画头像。通过实际测试来对比免费选项和付费选项,找到最适合你的创作工具,今天就在XIX.AI上将你的故事变为现实吧。
10 个工具
xix.ai
漫画创作
漫画领域顶尖的AI自动上色工具:零一致性错误地应用平涂色彩
立即访问 XIX.AI,探索 2026 年最优秀的漫画 AI 自动上色工具。我们精心筛选的清单汇集了广受好评、颠覆行业的解决方案,这些工具能以零一致性错误的方式应用平涂色彩,从而大幅提升您的工作效率。通过免费版与付费版的对比分析、实际测试以及每周更新的排行榜,找到最适合您的工具。立即开启您的 AI 优势。
10 个工具
xix.ai
写作
顶尖 AI 角色设定生成器:生成一致的角色动机与致命缺陷
探索2026年最优秀的AI人物设定生成工具,助您塑造鲜活立体的角色。XIX.AI精心筛选的这份清单汇集了广受好评、颠覆传统的工具,能够生成具有内在逻辑的动机和致命缺陷。通过实际测试对比免费与付费选项。立即释放您的叙事潜能。
10 个工具
xix.ai
商业
顶级 AI 定价优化软件:追踪竞争对手并自动调整店铺价格
在 XIX.AI 上探索 2026 年最佳 AI 定价优化软件。我们精心挑选的清单汇集了备受好评、具有颠覆性意义的工具,这些工具不仅能追踪竞争对手,还能自动调整您的店铺价格,从而实现利润最大化。通过实际测试对比免费与付费选项。立即掌握您的定价优势。
10 个工具
xix.ai
代码
最佳 AI 代码审查工具:自动确保代码符合规范,并重构遗留代码库文件
在 XIX.AI 上探索 2026 年最佳 AI 代码审查工具。我们的精选列表汇集了备受好评、具有颠覆性的工具,可自动确保代码规范并重构遗留代码库文件。通过实际测试和每周更新的排行榜,对比免费与付费选项。立即开启您的 AI 优势。
10 个工具
xix.ai

 评论 (0)
0/500
评论 (0)
0/500
为了开发GEN-1,Generalist增强了训练稳定性,创建了定制内核,设计了用于实时推理的创新分页注意力方法,优化了训练后技术,并改进了控制系统以实现更流畅、更精确的操作。| 来源:Generalist AI
Generalist AI公司昨日发布了其面向机器人领域的通用AI模型GEN-1。该公司表示,该系统将平均任务成功率提升至99%,而此前模型的成功率仅为64%。据Generalist称,该系统完成任务的速度约为当前方法的三倍,且每项任务仅需一小时的机器人数据即可实现这些成果。
该公司成立于2024年,致力于为多功能机器人开发具身基础模型。总部位于加利福尼亚州圣马特奥的Generalist宣称,GEN-1“为广泛的应用领域解锁了商业可行性”。此次发布距离其GEN-0模型发布仅五个月,该公司曾表示GEN-0证实了机器人领域存在规模定律。
尽管对该AI模型的进步持乐观态度,Generalist也承认GEN-1无法解决所有任务。这家初创公司补充道,某些实际应用需要超过99%的成功率才能真正发挥实用价值。
编者按:5月27日至28日在波士顿举行的2026年机器人峰会暨博览会(Robotics Summit & Expo)将重点呈现关于具身与物理人工智能开发的专题会议。现已开放注册。
GEN-1基于真实世界数据进行训练,是在GEN-0基础上实现规模化升级
Generalist AI解释称,GEN-1在GEN-0的基础上通过进一步扩展和算法改进,开始掌握基础任务。该模型完全基于该公司包含50万小时真实世界数据的数据集从头开始训练。
通过GEN-0,Generalist证明了机器人学习可以像语言模型那样以可预测的方式实现泛化扩展。该公司指出,其监测的每一项零样本任务都同时取得了进步。不过,该公司也承认该模型的性能“尚不足以进行商业部署”。
Generalist表示,GEN-1是数据和计算规模扩大的成果,并得益于算法突破的加速。该公司报告称,部分任务现已达到经济上可行的实际应用所需的性能门槛。
该公司指出,此前成功率超过90%的通用机器人模型,均依赖于庞大、昂贵且难以扩展的遥操作数据集。相比之下,GEN-0和GEN-1的基础模型在训练过程中并未使用任何机器人专用数据。
取而代之的是,该模型利用了人类在执行数百万种活动时佩戴的低成本可穿戴设备所采集的数据。Generalist表示,他们已证明这种预训练方法无需依赖大型遥操作或模拟数据集,即可实现高水平的掌握能力。
Generalist 融合了多项技术领域的最新进展
据 Generalist AI 介绍,GEN-1 融合了提升计算效率的预训练创新技术。后训练技术、基于经验的学习(强化学习)、多模态人类引导以及新型推理时方法的进步,也共同推动了其在各类任务中的性能提升。
除上述改进外,该公司表示与前代产品相比,GEN-1的计算规模实现了显著提升。Generalist指出:“它展现了快速学习新任务、适应新环境以及展现物理常识的能力。”
该公司声称 GEN-1 是一款数据高效的学习者。在某些测试中,该模型仅使用十分之一任务专用数据和更少的微调步骤,便实现了与 GEN-0 相当的性能。
Generalist解释道,由于预训练数据集不含机器人数据,当GEN-1适应新任务时,它实际上是在首次同时学习具体的机器人形态和任务本身。
GEN-1 提升了可靠性和即兴智能
“具身基础模型必须可靠、快速,并能从意外情况中恢复,”Generalist表示。关于可靠性,该公司指出GEN-1可在长时间内以高可靠性水平执行多项任务,且无需人工干预。
该公司展示了 GEN-1 在六项任务中的表现:组装汽车零部件超过一小时、连续折叠 T 恤 86 次、连续维护扫地机器人 200 多次、连续打包积木 1,800 多次、连续折叠纸箱 200 多次,以及不间断地打包手机 100 多次。
未经预训练、从零开始训练的任务表现欠佳,平均成功率仅为19%。针对这些任务进行微调的GEN-0模型成功率达到64%。Generalist表示,GEN-1实现了生产级别的成功率,平均达99%。
Generalist表示,这些模型能够对不可预见的场景做出创造性响应。以汽车零部件套件组装为例,如果垫片因碰撞而偏离正确位置,机器人可以将其放下重新抓取,将其部分插入缝隙以展现外在灵巧性,甚至使用另一只手进行双手法内重新抓取。
Generalist 表示,若 T 恤等大型可变形物体出现意外变形,模型也能自行推导出恢复方案。该公司指出:“这些行为完全超出了训练数据分布范围,直接有助于从罕见且意外的事件中恢复。”
Generalist模型加速任务完成
Generalist AI表示,GEN-1完成演示任务的速度约为当前最先进水平(SOTA)的三倍。该模型能够动态应对新的物体物理特性。
例如,GEN-1能在12.1秒内组装一个纸箱。Generalist称这比之前的SOTA快2.8倍——GEN-0和π0在组装相同纸箱时均耗时约34秒。GEN-1还能在15.5秒内将手机装入手机壳,其运行速度是GEN-0的2.8倍。
据 Generalist 介绍,多项技术组件促成了这些速度提升。这些模型通过经验学习,并借助谐波推理(Harmonic Reasoning)实现了推理能力的进化。
该公司还特别指出,其数据采集设备为模型提供了海量的预训练数据——这些数据来自以高速完成各类任务的过程,从而实现了从通用场景到相关动态的知识迁移。Generalist将此与传统遥操作系统进行了对比,后者因缺乏力反馈、存在延迟及可视性问题,自然会产生速度更慢、更不流畅的数据。
“构建GEN-1充满挑战——我们重新设计了分布式训练基础设施,以原生支持 petabytes 级别的物理交互数据,”Generalist AI 表示。该公司宣布,早期访问合作伙伴现可获取该模型。









 MoveIt Pro 9.0 升级版:感知与遥操作功能全面增强
据PickNik介绍,MoveIt Pro 9.0使机器人能够在几何结构不断变化且表面多样化的环境中高效工作。| 来源:PickNik RoboticsPickNik公司推出了MoveIt Pro 9.0,这是其用于构建机械臂应用程序平台的最新版本。此次更新引入了改进的感知到动作功能,并针对遥操作和训练数据采集系统进行了全面重新设计。这家总部位于科罗拉多州博尔德的公司表示,这些增强功能将帮助开发者
MoveIt Pro 9.0 升级版:感知与遥操作功能全面增强
据PickNik介绍,MoveIt Pro 9.0使机器人能够在几何结构不断变化且表面多样化的环境中高效工作。| 来源:PickNik RoboticsPickNik公司推出了MoveIt Pro 9.0,这是其用于构建机械臂应用程序平台的最新版本。此次更新引入了改进的感知到动作功能,并针对遥操作和训练数据采集系统进行了全面重新设计。这家总部位于科罗拉多州博尔德的公司表示,这些增强功能将帮助开发者
 SS Innovations 开发出用于无人机配送的外科手术机器人
SSi Vimana 航空无人机系统旨在将关键医疗救护直接送达战场上的伤员。| 来源:SS Innovations InternationalSS Innovations International Inc. 近日在印度新德里举办的“全球多专科机器人手术大会”上,展示了四款目前正在研发中的外科机器人系统。这些新平台包括 SSi Vimana 航空无人机系统、SSi Avtara 类人外科平台、SS
SS Innovations 开发出用于无人机配送的外科手术机器人
SSi Vimana 航空无人机系统旨在将关键医疗救护直接送达战场上的伤员。| 来源:SS Innovations InternationalSS Innovations International Inc. 近日在印度新德里举办的“全球多专科机器人手术大会”上,展示了四款目前正在研发中的外科机器人系统。这些新平台包括 SSi Vimana 航空无人机系统、SSi Avtara 类人外科平台、SS
 Pebble Time 2最终设计揭晓
随着Pebble回归初心,我们终于得以一睹即将面世的Pebble Time 2真容,该产品计划于今年晚些时候发货。(今年三月曾有过初步设计曝光,但当时仍属雏形阶段。)Core Devices首席执行官埃里克·米吉科夫斯基今日通过个人博客及YouTube频道公布了设计方案。Time 2将提供四种配色选择,但最终方案尚未确定——米吉科夫斯基强调公司正积极征集Pebble社区的反馈意见。 手表将采用不锈
Pebble Time 2最终设计揭晓
随着Pebble回归初心,我们终于得以一睹即将面世的Pebble Time 2真容,该产品计划于今年晚些时候发货。(今年三月曾有过初步设计曝光,但当时仍属雏形阶段。)Core Devices首席执行官埃里克·米吉科夫斯基今日通过个人博客及YouTube频道公布了设计方案。Time 2将提供四种配色选择,但最终方案尚未确定——米吉科夫斯基强调公司正积极征集Pebble社区的反馈意见。 手表将采用不锈
在 XIX.AI 上探索 2026 年最佳 AI 合同审查软件。我们精心筛选的顶级榜单汇集了功能强大的工具,能够即时发现法律漏洞和合规风险。通过实际测试和每周更新的排名,对比免费与付费选项。找到能彻底改变游戏规则的解决方案,实现安全、高效的合同分析。立即探索这本权威指南。
10 个工具
xix.ai
探索2026年最适合制作中文动画的人工智能工具。我们精心挑选的顶级列表中包含了各种强大的工具,能够帮助你创建出令人惊叹的网络小说角色和漫画头像。通过实际测试来对比免费选项和付费选项,找到最适合你的创作工具,今天就在XIX.AI上将你的故事变为现实吧。
10 个工具
xix.ai
立即访问 XIX.AI,探索 2026 年最优秀的漫画 AI 自动上色工具。我们精心筛选的清单汇集了广受好评、颠覆行业的解决方案,这些工具能以零一致性错误的方式应用平涂色彩,从而大幅提升您的工作效率。通过免费版与付费版的对比分析、实际测试以及每周更新的排行榜,找到最适合您的工具。立即开启您的 AI 优势。
10 个工具
xix.ai
探索2026年最优秀的AI人物设定生成工具,助您塑造鲜活立体的角色。XIX.AI精心筛选的这份清单汇集了广受好评、颠覆传统的工具,能够生成具有内在逻辑的动机和致命缺陷。通过实际测试对比免费与付费选项。立即释放您的叙事潜能。
10 个工具
xix.ai

在 XIX.AI 上探索 2026 年最佳 AI 定价优化软件。我们精心挑选的清单汇集了备受好评、具有颠覆性意义的工具,这些工具不仅能追踪竞争对手,还能自动调整您的店铺价格,从而实现利润最大化。通过实际测试对比免费与付费选项。立即掌握您的定价优势。
10 个工具
xix.ai

在 XIX.AI 上探索 2026 年最佳 AI 代码审查工具。我们的精选列表汇集了备受好评、具有颠覆性的工具,可自动确保代码规范并重构遗留代码库文件。通过实际测试和每周更新的排行榜,对比免费与付费选项。立即开启您的 AI 优势。
10 个工具
xix.ai













