
















 首页
首页Nvidia借助云计算推动类人机器人发展
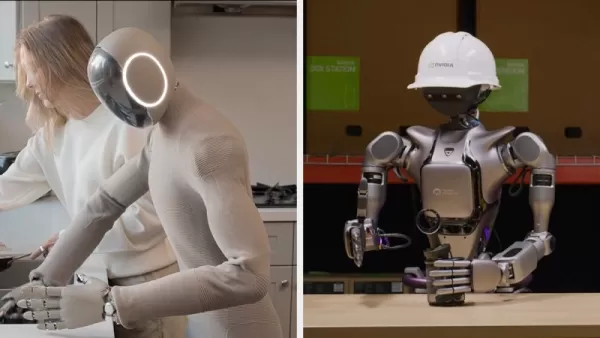
英伟达正全力冲刺人形机器人领域,没有丝毫退缩。在2025年台湾Computex贸易展会上,他们展示了一系列创新,旨在重新定义机器人开发的格局。其中,展会明星是英伟达Isaac GR00T N1.5,这是英伟达开放、可完全定制的人形推理和技能基础模型的最新版本。与此同时,英伟达推出了Isaac GR00T-Dreams,这是一个旨在生成合成运动数据的蓝图,以及强大的英伟达Blackwell系统,这些系统将加速人形机器人的开发。
包括Agility Robotics、Boston Dynamics、Fourier、Foxlink、Galbot、Mentee Robotics、NEURA Robotics、General Robotics、Skild AI和XPENG Robotics在内的一些领先的人形和机器人开发者已经加入,借助英伟达的Isaac平台技术,突破人形机器人可能性的边界。
英伟达首席执行官黄仁勋难掩兴奋之情,他表示:“物理AI和机器人将带来下一次工业革命。从机器人的AI大脑到用于练习的模拟世界,再到用于训练基础模型的AI超级计算机,英伟达为机器人开发旅程的每个阶段提供了构建模块。”
新的Isaac GR00T数据生成蓝图填补数据缺口
 你有没有想过拥有自己的人形机器人?在Computex的主题演讲中,黄仁勋展示了英伟达Isaac GR00T-Dreams,这是一个改变游戏规则的蓝图,能够生成大量合成运动数据,或称为神经轨迹。这些数据对物理AI开发者来说是一座金矿,帮助他们教授机器人一系列新行为以及如何适应不断变化的环境。
你有没有想过拥有自己的人形机器人?在Computex的主题演讲中,黄仁勋展示了英伟达Isaac GR00T-Dreams,这是一个改变游戏规则的蓝图,能够生成大量合成运动数据,或称为神经轨迹。这些数据对物理AI开发者来说是一座金矿,帮助他们教授机器人一系列新行为以及如何适应不断变化的环境。
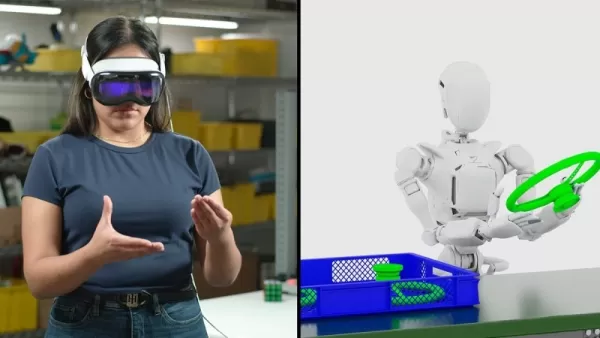
流程从开发者对机器人进行Cosmos Predict世界基础模型(WFMs)的后训练开始。然后,仅需一张图片作为输入,GR00T-Dreams就能生成机器人在新环境中处理新任务的视频。接着,它提取动作令牌——小块、易于消化的数据——机器人利用这些数据学习新任务。
GR00T-Dreams与早前在英伟达GTC大会上推出的Isaac GR00T-Mimic蓝图协同工作。GR00T-Mimic利用英伟达Omniverse和英伟达Cosmos增强现有数据,而GR00T-Dreams则使用Cosmos从头创建全新数据。
英伟达AI总监兼杰出科学家Jim Fan在新闻发布会上分享了他的热情:“英伟达拥有非常强大的机器人战略,围绕着黄仁勋所说的三台计算机问题。”他解释说,OVX计算机处理仿真和图形仿真物理引擎,生成数据,然后由DGX计算机用来训练基础模型。这些数据随后部署到HX计算机上,HX计算机在边缘运行,用于人形机器人等平台。
Fan自豪地将Gr00t称为物理AI和基于机器人的工作流程的生命周期,强调:“这是三台计算机问题的实例化。”他特别提到Gr00t项目的两大进展:Gr00t Dreams和Gr00t N1.5,并开玩笑说他对这些名字感到非常骄傲。
对于Gr00t Dreams,Fan将其描述为一种生成视频以训练机器人的模型。他展示了大量由英伟达Cosmos生成的视频,解释说:“我们找到了一种方法,将Cosmos这样的高级视频生成模型应用于人形机器人。因此,从高层次来看,这种方法的工作原理是,我们首先对实验室的机器人视频进行Cosmos的微调,使这个视频模型现在为我们实验室的机器人定制。然后,我们可以用这个微调模型通过不同方式提示模型,理论上生成无限数量的梦想视频。这些成为补充我们真实机器人数据集的合成数据。正如你们许多人可能知道的,收集真实机器人的数据非常耗时且成本高昂,因为你每天每个机器人最多只有24小时,对吧?这是一个物理系统,但有了Gr00t Dreams,这种新的工作流程,这种新的算法集,我们现在能够突破这一基本物理限制,并以前所未有的规模倍增数据。”
结果呢?机器人能够正确拿起物体,无论是黄瓜、倒橙汁还是打开笔记本电脑。Fan指出,这些都是机器人从未受过训练的动作,但通过视频模型的训练,机器人能够“理解物理和这些动词的含义”并学会执行它们。
新的Isaac GR00T模型推动人形机器人发展
 英伟达的GR00T-Dreams蓝图不仅是空谈;它已被用于在短短36小时内生成合成训练数据以开发GR00T N1.5——如果没有这个蓝图,这项任务将耗时近三个月。GR00T N1.5现在能更好地适应新环境和工作空间配置,并通过用户指令识别物体。这一更新显著提高了模型在常见任务(如分类或整理物体)中的成功率,并且已准备好部署在今年晚些时候推出的Jetson Thor上。
英伟达的GR00T-Dreams蓝图不仅是空谈;它已被用于在短短36小时内生成合成训练数据以开发GR00T N1.5——如果没有这个蓝图,这项任务将耗时近三个月。GR00T N1.5现在能更好地适应新环境和工作空间配置,并通过用户指令识别物体。这一更新显著提高了模型在常见任务(如分类或整理物体)中的成功率,并且已准备好部署在今年晚些时候推出的Jetson Thor上。
GR00T N1.5基础模型将Gr00t Dreams集成到其合成数据生成管道中。英伟达升级了视觉语言骨干,确保GR00T N1.5将具有更强的适应性和更好的语言指令遵循能力,Fan表示。
GR00T N1.5将在Computex首次亮相,并将于6月9日作为开源发布。至于Gr00t Dreams,英伟达仍在调整时间表,但Fan补充说,他们希望尽可能开源。
GR00T N的早期采用者包括AeiRobot、Foxlink、Lightwheel和NEURA Robotics。AeiRobot使用该模型使ALICE4能够理解自然语言指令并在工业环境中执行复杂的取放工作流程。Foxlink集团利用它来提高工业机器人操作手的灵活性和效率,而Lightwheel正在验证合成数据,以加速工厂中人形机器人的部署。NEURA Robotics正在探索该模型以加速其家用自动化开发。
新的机器人仿真和数据生成框架加速训练管道
 创建高技能的人形机器人不仅仅关乎硬件;还需要为它们提供大量多样化的数据,收集和处理这些数据的成本和时间都很高。此外,在现实世界中测试机器人也带来了一系列挑战和风险。
创建高技能的人形机器人不仅仅关乎硬件;还需要为它们提供大量多样化的数据,收集和处理这些数据的成本和时间都很高。此外,在现实世界中测试机器人也带来了一系列挑战和风险。
为了填补这些空白,英伟达推出了几种仿真技术:
- 英伟达Cosmos Reason,一种新的WFM,使用思维链推理帮助筛选准确、高质量的合成数据,用于物理AI模型训练,现已在Hugging Face上可用。
- Cosmos Predict 2,用于GR00T Dreams,即将在Hugging Face上推出,性能提升用于高质量世界生成并减少幻觉。
- 英伟达Isaac GR00T-Mimic,一种蓝图,仅需少量人类演示即可生成指数级数量的合成运动轨迹,用于机器人操作。
- 开源物理AI数据集,现包括24,000条高质量人形机器人运动轨迹,用于开发GR00T N模型。
- 英伟达Isaac Sim 5.0,一个仿真和合成数据生成框架,现已在GitHub上公开可用。
- 英伟达Isaac Lab 2.2,一个开源机器人学习框架,将包括新的评估环境,帮助开发者测试GR00T N模型。
富士康和Foxlink已经在使用GR00T-Mimic蓝图来加速其机器人训练管道。与此同时,Agility Robotics、Boston Dynamics、Fourier、Mentee Robotics、NEURA Robotics和XPENG Robotics正在使用英伟达Isaac Sim和Isaac Lab进行人形机器人的仿真和训练。Skild AI正在使用这些仿真框架开发通用机器人智能,General Robotics则将其整合到其机器人智能平台中。
面向机器人开发者的通用Blackwell系统
全球系统制造商正在加紧努力,构建英伟达RTX PRO 6000工作站和服务器。这些系统提供统一架构,能够处理从训练和合成数据生成到机器人学习和仿真的每个机器人开发工作负载。
思科、戴尔科技、惠普企业、联想和Supermicro均已宣布推出英伟达RTX PRO 6000 Blackwell驱动的服务器,而戴尔科技和联想还发布了英伟达RTX PRO 6000 Blackwell驱动的工作站。
当需要更多计算能力来运行大规模训练或数据生成工作负载时,开发者可以转向英伟达Blackwell系统,如GB200 NVL72。这些系统通过领先的云提供商和英伟达云合作伙伴的英伟达DGX Cloud提供,承诺数据处理性能提升高达18倍。
相关文章
 英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
相关专题推荐
写作
英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
相关专题推荐
写作
 最佳AI仙侠与武侠助手:创作史诗般的修仙历程与武打场面
最佳AI仙侠与武侠助手:创作史诗般的修仙历程与武打场面
探索2026年最优秀的AI助手,助您创作史诗级的仙侠与武侠故事。XIX.AI精心整理的这份清单汇集了广受好评、能彻底改变创作格局的工具,助您驾驭修仙进阶与武术动作设计。通过实际测试对比免费与付费选项。释放您的创作潜能,今天就开始写作吧!
 10 个工具
10 个工具
 xix.ai
代码
AI移动应用开发工具:根据提示生成跨平台的Flutter与React Native代码
xix.ai
代码
AI移动应用开发工具:根据提示生成跨平台的Flutter与React Native代码
探索2026年最适合Flutter和React Native的最佳AI移动应用开发工具。我们精心挑选的这些高评分工具能够提供强大的功能,帮助您根据提示生成跨平台代码。通过实际测试来对比免费选项和付费选项,让开发更加高效,从而打造出更出色的应用程序。现在就访问XIX.AI查看排名吧!
10 个工具
xix.ai
代码
最佳 AI Chrome 扩展程序生成工具:无需编程经验即可创建自定义浏览器插件
在 XIX.AI 上探索 2026 年最佳 AI Chrome 扩展程序生成器。我们精心挑选的这份清单汇集了广受好评、不容错过的工具,让您无需编写代码即可创建自定义浏览器插件。对比免费与付费选项,查看实际测试结果,并释放您的工作效率。立即查看最新排行榜,找到最适合您的工具!
10 个工具
xix.ai
文字转语音
最佳人工智能多语言文本转语音技术:能够生成50多种语言的逼真原声发音
探索2026年最优秀的人工智能多语言文本转语音工具,这些工具能够生成50多种语言中具有真实母语口音的语音。查看我们精心挑选的排名榜单,了解免费版本与付费版本的差异,并通过实际测试来验证它们的效果。在XIX.AI上找到最适合你的语音工具,立即开启全球交流的新篇章吧。
10 个工具
xix.ai
会议助理
最适合提升协作效率的最佳人工智能会议自动化工具
探索2026年最新评选出的顶级AI会议自动化工具,让协作变得更智能、更高效。我们精心挑选的这些工具能够有效实现笔记、总结和待办事项的自动化处理。通过实际测试和每周更新的排名,您可以了解免费选项与付费选项的差异。立即访问XIX.AI,发现最适合您需求的工具,提升团队生产力吧。
10 个工具
xix.ai
提示词
适用于基础设施即代码的 AI 提示:安全部署 Terraform 和 Docker 配置
探索 2026 年最新、评价最高的“基础设施即代码”(Infrastructure-as-Code)AI 提示词。XIX.AI 精心挑选的提示词集可助您安全部署 Terraform 和 Docker 配置、自动化云环境搭建,并提升 DevOps 工作效率。通过实际测试对比免费与付费选项。立即探索,释放您的 AI 优势。
10 个工具
xix.ai

 评论 (2)
0/500
评论 (2)
0/500
![RobertWhite]()
Wow, Nvidia se lance à fond dans la robotique humanoïde ! Leur Isaac G semble incroyable, mais j’espère qu’ils pensent aussi aux questions éthiques. Les robots trop intelligents, ça peut devenir flippant, non ? 😅
![RoyMitchell]()
Nvidia's diving into humanoid robotics is wild! The Isaac G reveal at Computex 2025 sounds like a game-changer. Can't wait to see how this shakes up automation, but I wonder if they're moving too fast with the cloud integration. 🤔
英伟达正全力冲刺人形机器人领域,没有丝毫退缩。在2025年台湾Computex贸易展会上,他们展示了一系列创新,旨在重新定义机器人开发的格局。其中,展会明星是英伟达Isaac GR00T N1.5,这是英伟达开放、可完全定制的人形推理和技能基础模型的最新版本。与此同时,英伟达推出了Isaac GR00T-Dreams,这是一个旨在生成合成运动数据的蓝图,以及强大的英伟达Blackwell系统,这些系统将加速人形机器人的开发。
包括Agility Robotics、Boston Dynamics、Fourier、Foxlink、Galbot、Mentee Robotics、NEURA Robotics、General Robotics、Skild AI和XPENG Robotics在内的一些领先的人形和机器人开发者已经加入,借助英伟达的Isaac平台技术,突破人形机器人可能性的边界。
英伟达首席执行官黄仁勋难掩兴奋之情,他表示:“物理AI和机器人将带来下一次工业革命。从机器人的AI大脑到用于练习的模拟世界,再到用于训练基础模型的AI超级计算机,英伟达为机器人开发旅程的每个阶段提供了构建模块。”
新的Isaac GR00T数据生成蓝图填补数据缺口
你有没有想过拥有自己的人形机器人?在Computex的主题演讲中,黄仁勋展示了英伟达Isaac GR00T-Dreams,这是一个改变游戏规则的蓝图,能够生成大量合成运动数据,或称为神经轨迹。这些数据对物理AI开发者来说是一座金矿,帮助他们教授机器人一系列新行为以及如何适应不断变化的环境。
流程从开发者对机器人进行Cosmos Predict世界基础模型(WFMs)的后训练开始。然后,仅需一张图片作为输入,GR00T-Dreams就能生成机器人在新环境中处理新任务的视频。接着,它提取动作令牌——小块、易于消化的数据——机器人利用这些数据学习新任务。
GR00T-Dreams与早前在英伟达GTC大会上推出的Isaac GR00T-Mimic蓝图协同工作。GR00T-Mimic利用英伟达Omniverse和英伟达Cosmos增强现有数据,而GR00T-Dreams则使用Cosmos从头创建全新数据。
英伟达AI总监兼杰出科学家Jim Fan在新闻发布会上分享了他的热情:“英伟达拥有非常强大的机器人战略,围绕着黄仁勋所说的三台计算机问题。”他解释说,OVX计算机处理仿真和图形仿真物理引擎,生成数据,然后由DGX计算机用来训练基础模型。这些数据随后部署到HX计算机上,HX计算机在边缘运行,用于人形机器人等平台。
Fan自豪地将Gr00t称为物理AI和基于机器人的工作流程的生命周期,强调:“这是三台计算机问题的实例化。”他特别提到Gr00t项目的两大进展:Gr00t Dreams和Gr00t N1.5,并开玩笑说他对这些名字感到非常骄傲。
对于Gr00t Dreams,Fan将其描述为一种生成视频以训练机器人的模型。他展示了大量由英伟达Cosmos生成的视频,解释说:“我们找到了一种方法,将Cosmos这样的高级视频生成模型应用于人形机器人。因此,从高层次来看,这种方法的工作原理是,我们首先对实验室的机器人视频进行Cosmos的微调,使这个视频模型现在为我们实验室的机器人定制。然后,我们可以用这个微调模型通过不同方式提示模型,理论上生成无限数量的梦想视频。这些成为补充我们真实机器人数据集的合成数据。正如你们许多人可能知道的,收集真实机器人的数据非常耗时且成本高昂,因为你每天每个机器人最多只有24小时,对吧?这是一个物理系统,但有了Gr00t Dreams,这种新的工作流程,这种新的算法集,我们现在能够突破这一基本物理限制,并以前所未有的规模倍增数据。”
结果呢?机器人能够正确拿起物体,无论是黄瓜、倒橙汁还是打开笔记本电脑。Fan指出,这些都是机器人从未受过训练的动作,但通过视频模型的训练,机器人能够“理解物理和这些动词的含义”并学会执行它们。
新的Isaac GR00T模型推动人形机器人发展
英伟达的GR00T-Dreams蓝图不仅是空谈;它已被用于在短短36小时内生成合成训练数据以开发GR00T N1.5——如果没有这个蓝图,这项任务将耗时近三个月。GR00T N1.5现在能更好地适应新环境和工作空间配置,并通过用户指令识别物体。这一更新显著提高了模型在常见任务(如分类或整理物体)中的成功率,并且已准备好部署在今年晚些时候推出的Jetson Thor上。
GR00T N1.5基础模型将Gr00t Dreams集成到其合成数据生成管道中。英伟达升级了视觉语言骨干,确保GR00T N1.5将具有更强的适应性和更好的语言指令遵循能力,Fan表示。
GR00T N1.5将在Computex首次亮相,并将于6月9日作为开源发布。至于Gr00t Dreams,英伟达仍在调整时间表,但Fan补充说,他们希望尽可能开源。
GR00T N的早期采用者包括AeiRobot、Foxlink、Lightwheel和NEURA Robotics。AeiRobot使用该模型使ALICE4能够理解自然语言指令并在工业环境中执行复杂的取放工作流程。Foxlink集团利用它来提高工业机器人操作手的灵活性和效率,而Lightwheel正在验证合成数据,以加速工厂中人形机器人的部署。NEURA Robotics正在探索该模型以加速其家用自动化开发。
新的机器人仿真和数据生成框架加速训练管道
创建高技能的人形机器人不仅仅关乎硬件;还需要为它们提供大量多样化的数据,收集和处理这些数据的成本和时间都很高。此外,在现实世界中测试机器人也带来了一系列挑战和风险。
为了填补这些空白,英伟达推出了几种仿真技术:
- 英伟达Cosmos Reason,一种新的WFM,使用思维链推理帮助筛选准确、高质量的合成数据,用于物理AI模型训练,现已在Hugging Face上可用。
- Cosmos Predict 2,用于GR00T Dreams,即将在Hugging Face上推出,性能提升用于高质量世界生成并减少幻觉。
- 英伟达Isaac GR00T-Mimic,一种蓝图,仅需少量人类演示即可生成指数级数量的合成运动轨迹,用于机器人操作。
- 开源物理AI数据集,现包括24,000条高质量人形机器人运动轨迹,用于开发GR00T N模型。
- 英伟达Isaac Sim 5.0,一个仿真和合成数据生成框架,现已在GitHub上公开可用。
- 英伟达Isaac Lab 2.2,一个开源机器人学习框架,将包括新的评估环境,帮助开发者测试GR00T N模型。
富士康和Foxlink已经在使用GR00T-Mimic蓝图来加速其机器人训练管道。与此同时,Agility Robotics、Boston Dynamics、Fourier、Mentee Robotics、NEURA Robotics和XPENG Robotics正在使用英伟达Isaac Sim和Isaac Lab进行人形机器人的仿真和训练。Skild AI正在使用这些仿真框架开发通用机器人智能,General Robotics则将其整合到其机器人智能平台中。
面向机器人开发者的通用Blackwell系统
全球系统制造商正在加紧努力,构建英伟达RTX PRO 6000工作站和服务器。这些系统提供统一架构,能够处理从训练和合成数据生成到机器人学习和仿真的每个机器人开发工作负载。
思科、戴尔科技、惠普企业、联想和Supermicro均已宣布推出英伟达RTX PRO 6000 Blackwell驱动的服务器,而戴尔科技和联想还发布了英伟达RTX PRO 6000 Blackwell驱动的工作站。
当需要更多计算能力来运行大规模训练或数据生成工作负载时,开发者可以转向英伟达Blackwell系统,如GB200 NVL72。这些系统通过领先的云提供商和英伟达云合作伙伴的英伟达DGX Cloud提供,承诺数据处理性能提升高达18倍。










 英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
英伟达的OpenClaw版本或许能解决其最大的难题:安全性
英伟达首席执行官黄仁勋认为,每家公司都需要一套OpenClaw战略——而英伟达已准备好提供这一解决方案。在周一的GTC主题演讲中,黄仁勋宣布英伟达已开发出NemoClaw,这是一个源自广受欢迎的本地AI自主代理的企業级平台。该开源平台本质上是集成了企业级安全与隐私功能的OpenClaw。据英伟达介绍,其目标是将OpenClaw转变为一个安全平台,企业只需一条命令即可访问,从而能够控制代理的行为方式
 五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
五角大楼与英伟达、微软和亚马逊网络服务公司签订了协议,以便在机密网络中部署人工智能技术。
在此前与谷歌、SpaceX和OpenAI达成协议之后,美国国防部于周五宣布,它现已与Nvidia、微软、亚马逊网络服务和Reflection AI签订了合同,这些公司将会将其人工智能技术和模型部署在保密网络上,用于“合法的操作用途”。声明中还指出:“这些协议加速了将美国军队建设成为以人工智能为核心作战力量的进程,并将增强我们的战士在所有战争领域保持决策优势的能力。”这些协议的签署,正值五角大楼试图在与Anthropic就使用条款发生争议后,多元化其人工智能供应商的选择。五角大楼希望无限制地使
 英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
英伟达GTC大会发布NemoClaw、机器人奥拉夫,并押注万亿美元
正在加载播放器……本周,英伟达CEO黄仁勋身着标志性的皮夹克登上GTC大会的舞台,发表了一场长达两个半小时的主题演讲。他在演讲中预测,到2027年人工智能芯片销售额将达到1万亿美元,并宣称每家公司都需要制定“OpenClaw战略”,最后登场的是一个语无伦次的Olaf机器人,最终不得不被切断麦克风。 其核心信息不言而喻:英伟达希望成为一切事物的基石,从AI训练到自动驾驶汽车,乃至迪士尼乐园。在本期T
探索2026年最优秀的AI助手,助您创作史诗级的仙侠与武侠故事。XIX.AI精心整理的这份清单汇集了广受好评、能彻底改变创作格局的工具,助您驾驭修仙进阶与武术动作设计。通过实际测试对比免费与付费选项。释放您的创作潜能,今天就开始写作吧!
10 个工具
xix.ai

探索2026年最适合Flutter和React Native的最佳AI移动应用开发工具。我们精心挑选的这些高评分工具能够提供强大的功能,帮助您根据提示生成跨平台代码。通过实际测试来对比免费选项和付费选项,让开发更加高效,从而打造出更出色的应用程序。现在就访问XIX.AI查看排名吧!
10 个工具
xix.ai
在 XIX.AI 上探索 2026 年最佳 AI Chrome 扩展程序生成器。我们精心挑选的这份清单汇集了广受好评、不容错过的工具,让您无需编写代码即可创建自定义浏览器插件。对比免费与付费选项,查看实际测试结果,并释放您的工作效率。立即查看最新排行榜,找到最适合您的工具!
10 个工具
xix.ai
探索2026年最优秀的人工智能多语言文本转语音工具,这些工具能够生成50多种语言中具有真实母语口音的语音。查看我们精心挑选的排名榜单,了解免费版本与付费版本的差异,并通过实际测试来验证它们的效果。在XIX.AI上找到最适合你的语音工具,立即开启全球交流的新篇章吧。
10 个工具
xix.ai
探索2026年最新评选出的顶级AI会议自动化工具,让协作变得更智能、更高效。我们精心挑选的这些工具能够有效实现笔记、总结和待办事项的自动化处理。通过实际测试和每周更新的排名,您可以了解免费选项与付费选项的差异。立即访问XIX.AI,发现最适合您需求的工具,提升团队生产力吧。
10 个工具
xix.ai
探索 2026 年最新、评价最高的“基础设施即代码”(Infrastructure-as-Code)AI 提示词。XIX.AI 精心挑选的提示词集可助您安全部署 Terraform 和 Docker 配置、自动化云环境搭建,并提升 DevOps 工作效率。通过实际测试对比免费与付费选项。立即探索,释放您的 AI 优势。
10 个工具
xix.ai

Wow, Nvidia se lance à fond dans la robotique humanoïde ! Leur Isaac G semble incroyable, mais j’espère qu’ils pensent aussi aux questions éthiques. Les robots trop intelligents, ça peut devenir flippant, non ? 😅
Nvidia's diving into humanoid robotics is wild! The Isaac G reveal at Computex 2025 sounds like a game-changer. Can't wait to see how this shakes up automation, but I wonder if they're moving too fast with the cloud integration. 🤔













