
















 首頁
首頁NVIDIA 在 2025 年對於實體 AI 和機器人的願景是什麼?
人工智慧領域正快速發展,將其觸角從純粹的數位空間延伸至有形的實體世界。NVIDIA 是這一領域的領導者,其願景是實體人工智慧 (Physical AI)。此概念旨在讓機器人與自主系統具備智慧、效率與適應力,以進行精密的真實世界互動。透過運用先進的模擬與 AI 模型,NVIDIA 正在為未來打好基礎,讓機器人可以無縫融入日常生活,處理複雜的任務並解決實際問題。本文將探討 NVIDIA 的策略、實現策略的核心技術,以及 Physical AI 對社會的潛在影響。
重點
Physical AI:透過機器人技術讓人工智慧能夠理解並參與實體世界。
模擬為基礎:利用高保真模擬來有效訓練和驗證人工智能模型。
GROOT:通用機器人 00 技術:NVIDIA 開發通用機器人的基礎專案。
物理 API:允許與實體硬體直接控制與互動的軟體介面。
機器人的資料稀缺性:模擬克服真實世界訓練資料有限的挑戰。
物理圖靈測試 (Physical Turing Test):評估人工智能與物理世界互動能力的基準,就像人類一樣自然。
RoboCASA 架構:用於訓練機器人執行日常家務的模擬環境。
邁向數位表親:利用生成物理引擎作為精確數位孪生機器人的靈活替代方案。
機器人核能:提倡使用乾淨、強大的能源來滿足先進機器人的需求。
革新產業:物理人工智慧將改變眾多產業。
瞭解基礎:什麼是實體人工智慧?
定義實體人工智慧
實體人工智慧標誌著一大進化,將人工智慧從軟體轉移到機器人和機器人等實體系統。這些系統可以感知環境,根據物理定律進行推理,並採取行動來達成目標。目標是賦予機器人在非結構化、真實世界環境中運作的智慧。NVIDIA 的 Jim Fan 總結了這個目標:創造出能真正理解並操控物理世界的人工智能。
這個概念的核心是物理圖靈測試

.經典的圖靈測試判斷的是會話智能,而實體版本則要求與環境進行無縫互動。考慮到機器人在活動後進行清潔或烹飪,它必須識別物件、導航空間,並以與人類無異的方式完成這些動作。這需要強大的感知能力、精密的規劃和精確的運動控制。
實體人工智慧將強大的演算法與機器人及自動化結合,有望帶來更高的作業效率、更高的安全性,以及更強的應用適應性。
模擬的必要性:克服機器人技術中的資料稀缺問題
資料:人工智能的燃料
機器人人工智能的一個主要障礙是真實世界數據的稀缺。與擁有大量數位資料集的領域不同,機器人依賴於物理互動資料,而收集這些資料的成本高昂且速度緩慢。Jim Fan 將互聯網稱為「人工智能的化石燃料」。
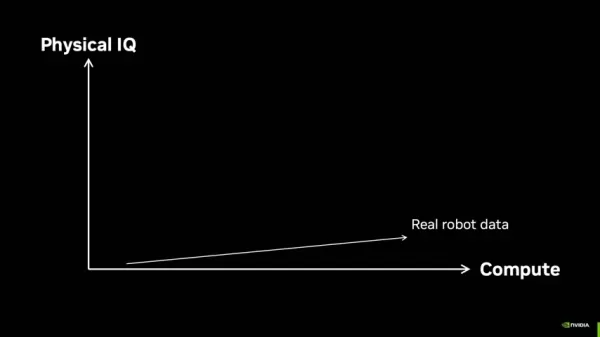
,強調現有資料如何助長模型訓練與進步。
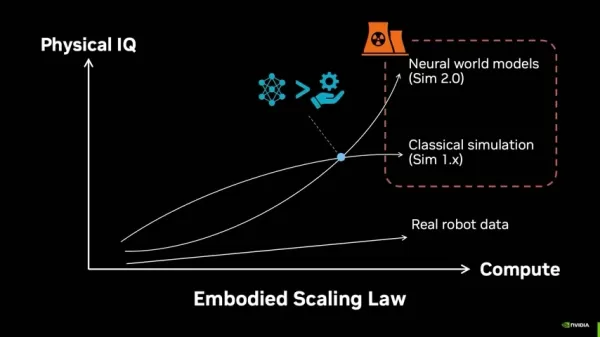
資料短缺妨礙了可靠、通用的機器人人工智慧發展。NVIDIA 的解決方案是讓高保真模擬成為實體 AI 的基本組成部分。模擬創造出逼真的虛擬世界,讓機器人可以在其中進行廣泛的訓練,在受控的環境中產生大量符合成本效益的資料。
高保真模擬:NVIDIA 建立了物理上精確的虛擬環境,讓機器人可以學習並適應無數的情境,而不需承擔現實世界的風險或花費。這些模擬結合了逼真的物理、光線與感測器模型,可將技能轉移到實際機器人身上。
領域隨機化:為了建立更強大的人工智慧,NVIDIA 採用了領域隨機化技術。這項技術會改變模擬參數,例如重力、摩擦力和光線,讓 AI 面對各種不同的狀況。它可以防止模擬過度適應,並提高人工智能對真實世界複雜性的概括能力。有效的模擬需要速度與多樣性,才能接近現實。
RoboCASA:實體圖靈測試訓練
為此,NVIDIA 開發了 RoboCASA 架構
,模擬家庭環境。透過複製日常任務,RoboCASA 可訓練通用機器人在真實世界的環境中運作。
RoboCASA 提供高度的客製化能力,以簡化 AI 訓練。其中一個主要功能是由 AI 產生環境紋理,LLM 會建立 XML 程式碼來詳細描述 3D 資產。此方法可產生高度客製化的模擬平台。
數位雙胞胎與數位表親
NVIDIA 的模擬架構包含數位雙胞胎與數位表親的概念

.一個完美的數位孪生體可以一比一的精確度反映出其物理對應,這可能是一個挑戰。通常,生成物理模型 (或稱為表兄弟) 是一種實用的替代方案。
數位表兄弟是生成式物理引擎,可能會為了速度而犧牲一些精確度。它們的有效性在很大程度上取決於領域隨機化的應用。
有效使用模擬:主要原則
模擬原則
NVIDIA 為有效的機器人 AI 訓練建立了核心原則。首先是模擬世界的速度必須比即時快 10,000 倍。這種加速度可讓機器人體驗更多的情境,並加速模型迭代。最初的一百萬個模擬世界看似相似,但最終還是會出現獨特的挑戰,而有意義的 AI 學習正是發生在這些邊緣案例中。
訓練會在模擬「矩陣」中進行,之後會在現實中部署知識。與產生模擬資料相比,收集真實世界訓練資料的成本過高。
實體 AI 工具的定價
授權與開放原始碼的可及性
NVIDIA 認為開放原始碼開發對於 Physical AI 的未來至關重要。在 3 月的 GTC 會議上,NVIDIA 宣佈未來的核心模型將採用開放原始碼。此舉旨在使該領域民主化、擴大物理 AI 工具的存取範圍,並透過社群合作加速改進。這些模型將根據全球開發人員的意見持續演進。
未來之路:物理 AI 的優缺點
優點
顯著改善多個產業的效率。
提高危險工作環境的安全性。
提高在動態、非結構性環境中的適應能力。
透過工作自動化降低成本。
透過模擬進行 AI 訓練比實體試驗更經濟實惠。
缺點
系統開發與部署的初期投資較高。
耗電量大。
AI 系統通常仍需要人為監督或介入。
與自主系統故障或意外行為相關的潛在風險。
實體機器人硬體可能先於 AI 軟體疲勞或故障。
NVIDIA 實體 AI 生態系統的核心功能
實體 AI 的核心功能
NVIDIA Physical AI 策略的核心整合了模擬、高保真模型與合成資料,超越了簡單的任務執行。
以下各節將詳細介紹這些元件,在此僅作簡要概述。
NVIDIA GROOT:通用機器人 00 技術
GROOT 是 NVIDIA 雄心勃勃的計畫,旨在創造能執行各種任務的通用機器人。它包括為機器人建立統一的 AI 平台,讓開發人員可以在不同的硬體上部署模型。GROOT 包含必要的硬體、軟體與 AI 模型,為下一波智慧型機器人提供動力。
實體 API:縮小差距
NVIDIA 願景未來能讓軟體開發人員使用標準化的 Physical API,輕鬆控制實體系統。與軟體 API 將複雜性抽象化類似,Physical API 將為機器人、感測器和致動器提供一致的介面。這可讓開發人員專注於建立創新應用程式,而無需深厚的硬體專業知識。
革新產業:實體人工智慧的使用案例
利用實體人工智慧改造產業
Physical AI 有望改變許多產業,包括
- 製造業:將複雜的組裝自動化,以提高效率並降低成本。
- 物流業:使用自動駕駛車輛和機器人簡化倉庫、優化運送並改善供應鏈。
- 醫療保健:協助手術、運送補給品及提供病患支援。
- 農業:自動化作物監控、收割及其他農場工作,以提高產量並減少勞動力。
- 零售業:協助客戶、管理庫存及處理交易。
- 建築業:執行危險或重複性工作,以加強工人安全並加快工程進度。
每個產業應用都仰賴高效能運算硬體。
常見問題
什麼是實體人工智慧?
實體人工智慧 (Physical AI) 是將人工智慧整合至實體世界,讓機器人和自主系統能夠與環境進行智慧互動。
什麼是物理圖靈測試?
一項基準,用來評估機器人是否有能力像人類一樣執行實體任務。
模擬和數位孪生機器人有什麼好處?
模擬和數位孪生提供了一種安全、具成本效益的方法,以產生訓練強健機器人人工智慧所需的大量資料集。
什麼是 GROOT?
NVIDIA 開發創造多功能、通用機器人基礎平台的計畫。
相關問題
未來機器人的 AI 開發將面臨哪些挑戰?
開發機器人人工智慧面臨重大障礙,包括訓練所需的大量資料、高品質真實世界資料的稀少,以及取得資料的高昂成本。這些挑戰使得 AI 開發的典型困難更加複雜。提到的一個更廣泛的問題是,AI 預先訓練已經開始耗盡現成的資料來源。
相關文章
 Suno 領投方:刪除貼文無法彌補版權訴訟的漏洞
備受矚目的 AI 音樂生成平台 Suno 正面臨一場艱難的版權之爭,而其主要投資人的坦率言論,可能正好提供了對方所期盼的證據。 Menlo Ventures(Suno的核心投資者)合夥人C.C. Gong最近刪除了一則推文,該推文與該公司當前的法律辯護策略直接相悖。在之前的版權訴訟中,Suno 的辯護主要依賴「合理使用」的論點,聲稱 AI 生成的音樂僅僅是一種「工具」,不會直接與受版權保護的原創作
Claude Opus 4.7 正式推出,重視可靠性勝於智能
Anthropic 今年持續保持強勁的開發步調,幾乎每隔一天就會推出新功能。備受期待的 Claude Opus 4.7 剛正式發布,有趣的是,Anthropic 在公告中直言不諱地表示:「這並非我們最強大的模型。」 傳聞中更強大的 Claude Mythos Preview 仍處於待命狀態。儘管如此,Opus 4.7 仍引起了相當大的關注,因為它著重解決的是「更可靠」而非「更聰明」的問題。基準測試
海爾推出全球最輕的 AI 運動外骨骼機器人,重量僅 1.75 公斤
海爾集團推出全球最輕量的運動用人工智慧外骨骼機器人——海爾外骨骼機器人 W3。此次發布創下業界最輕量的新紀錄,標誌著在輕量化設計與智能人體動作增強領域取得重大突破。頂級材質成就超輕量設計W3採用創新的一體成型製造工藝,結合全碳纖維與鈦合金。這種航空級材質組合將總重量控制在僅1.75公斤,實現了輕量化與強度兼備的極致機械性能。為提升舒適度,機器人內置非牛頓流體材質,接觸皮膚時觸感柔軟,但在劇烈運動時
相關專題推薦
漫畫創作
Suno 領投方:刪除貼文無法彌補版權訴訟的漏洞
備受矚目的 AI 音樂生成平台 Suno 正面臨一場艱難的版權之爭,而其主要投資人的坦率言論,可能正好提供了對方所期盼的證據。 Menlo Ventures(Suno的核心投資者)合夥人C.C. Gong最近刪除了一則推文,該推文與該公司當前的法律辯護策略直接相悖。在之前的版權訴訟中,Suno 的辯護主要依賴「合理使用」的論點,聲稱 AI 生成的音樂僅僅是一種「工具」,不會直接與受版權保護的原創作
Claude Opus 4.7 正式推出,重視可靠性勝於智能
Anthropic 今年持續保持強勁的開發步調,幾乎每隔一天就會推出新功能。備受期待的 Claude Opus 4.7 剛正式發布,有趣的是,Anthropic 在公告中直言不諱地表示:「這並非我們最強大的模型。」 傳聞中更強大的 Claude Mythos Preview 仍處於待命狀態。儘管如此,Opus 4.7 仍引起了相當大的關注,因為它著重解決的是「更可靠」而非「更聰明」的問題。基準測試
海爾推出全球最輕的 AI 運動外骨骼機器人,重量僅 1.75 公斤
海爾集團推出全球最輕量的運動用人工智慧外骨骼機器人——海爾外骨骼機器人 W3。此次發布創下業界最輕量的新紀錄,標誌著在輕量化設計與智能人體動作增強領域取得重大突破。頂級材質成就超輕量設計W3採用創新的一體成型製造工藝,結合全碳纖維與鈦合金。這種航空級材質組合將總重量控制在僅1.75公斤,實現了輕量化與強度兼備的極致機械性能。為提升舒適度,機器人內置非牛頓流體材質,接觸皮膚時觸感柔軟,但在劇烈運動時
相關專題推薦
漫畫創作
 少年漫畫頂尖 AI 生成器:打造高張力動作場面與能量特效
少年漫畫頂尖 AI 生成器:打造高張力動作場面與能量特效
立即前往 XIX.AI,探索 2026 年最優秀的少年漫畫 AI 生成工具。我們精心挑選的頂級清單,匯集了能打造高張力動作場面與動態能量特效的強大工具。透過實際測試,比較免費與付費選項的差異。釋放您的創作潛能,今天就開始打造史詩級漫畫吧!
 15 個工具
15 個工具
 xix.ai
商業
最佳 AI 支出追蹤工具:掃描收據並自動分類公司開支
xix.ai
商業
最佳 AI 支出追蹤工具:掃描收據並自動分類公司開支
2026 年最新最佳 AI 報銷管理工具:備受好評的解決方案,可自動掃描收據並分類企業支出。探索強大且顛覆傳統的解決方案,助您輕鬆管理報銷、精準追蹤財務,並簡化合規流程。我們精心整理並每週更新的免費與付費方案比較指南,將協助您找到最合適的選擇。透過 XIX.AI 的專家精選,釋放您的 AI 優勢。
10 個工具
xix.ai
商業
最佳 AI 招聘工具:篩選履歷與自動化安排候選人面試
在 XIX.AI 探索 2026 年最新且評價最高的 AI 招聘工具。我們精心挑選的清單收錄了強大且具顛覆性的解決方案,可協助篩選履歷並自動化安排候選人面試。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即找到最適合您的招聘助手,並優化您的招聘流程!
10 個工具
xix.ai
生產率
AI 個人健康與專注力教練:管理倦怠感並提升精神能量
立即在 XIX.AI 探索 2026 年最佳 AI 個人健康與專注力教練。我們精心策劃的排行榜收錄了備受好評、能帶來革命性改變的工具,助您管理倦怠感並提升精神能量。透過實際使用心得,比較免費與付費方案的差異。立即開啟通往巔峰生產力與身心健康的道路。
10 個工具
xix.ai
聊天機器人
最受好評的 AI 浪漫聊天機器人:透過一貫的個性建立長期關係
探索 2026 年最新、評價最高的 AI 浪漫聊天機器人,助您建立真摯且長久的連結。我們精心整理的清單包含功能強大且性格鮮明的聊天機器人、免費與付費版本的比較,以及實際測試結果。立即前往 XIX.AI 尋找您的完美伴侶,並開始建立這段關係吧。
10 個工具
xix.ai
教育與學習
最佳AI資料科學導師:精通SQL、Pandas及機器學習工作流程
探索2026年最優秀的人工智慧資料科學導師,幫助他們掌握SQL、Pandas以及機器學習工作流程。在XIX.AI上檢視我們精心挑選的頂級導師名單,獲得強大而具有變革性的指導。透過對比免費和付費選項,並結合實際應用案例進行了解,今天就開啟你的資料科學精通之路吧。
10 個工具
xix.ai

 評論 (0)
0/500
評論 (0)
0/500
人工智慧領域正快速發展,將其觸角從純粹的數位空間延伸至有形的實體世界。NVIDIA 是這一領域的領導者,其願景是實體人工智慧 (Physical AI)。此概念旨在讓機器人與自主系統具備智慧、效率與適應力,以進行精密的真實世界互動。透過運用先進的模擬與 AI 模型,NVIDIA 正在為未來打好基礎,讓機器人可以無縫融入日常生活,處理複雜的任務並解決實際問題。本文將探討 NVIDIA 的策略、實現策略的核心技術,以及 Physical AI 對社會的潛在影響。
重點
Physical AI:透過機器人技術讓人工智慧能夠理解並參與實體世界。
模擬為基礎:利用高保真模擬來有效訓練和驗證人工智能模型。
GROOT:通用機器人 00 技術:NVIDIA 開發通用機器人的基礎專案。
物理 API:允許與實體硬體直接控制與互動的軟體介面。
機器人的資料稀缺性:模擬克服真實世界訓練資料有限的挑戰。
物理圖靈測試 (Physical Turing Test):評估人工智能與物理世界互動能力的基準,就像人類一樣自然。
RoboCASA 架構:用於訓練機器人執行日常家務的模擬環境。
邁向數位表親:利用生成物理引擎作為精確數位孪生機器人的靈活替代方案。
機器人核能:提倡使用乾淨、強大的能源來滿足先進機器人的需求。
革新產業:物理人工智慧將改變眾多產業。
瞭解基礎:什麼是實體人工智慧?
定義實體人工智慧
實體人工智慧標誌著一大進化,將人工智慧從軟體轉移到機器人和機器人等實體系統。這些系統可以感知環境,根據物理定律進行推理,並採取行動來達成目標。目標是賦予機器人在非結構化、真實世界環境中運作的智慧。NVIDIA 的 Jim Fan 總結了這個目標:創造出能真正理解並操控物理世界的人工智能。
這個概念的核心是物理圖靈測試
.經典的圖靈測試判斷的是會話智能,而實體版本則要求與環境進行無縫互動。考慮到機器人在活動後進行清潔或烹飪,它必須識別物件、導航空間,並以與人類無異的方式完成這些動作。這需要強大的感知能力、精密的規劃和精確的運動控制。
實體人工智慧將強大的演算法與機器人及自動化結合,有望帶來更高的作業效率、更高的安全性,以及更強的應用適應性。
模擬的必要性:克服機器人技術中的資料稀缺問題
資料:人工智能的燃料
機器人人工智能的一個主要障礙是真實世界數據的稀缺。與擁有大量數位資料集的領域不同,機器人依賴於物理互動資料,而收集這些資料的成本高昂且速度緩慢。Jim Fan 將互聯網稱為「人工智能的化石燃料」。
,強調現有資料如何助長模型訓練與進步。
資料短缺妨礙了可靠、通用的機器人人工智慧發展。NVIDIA 的解決方案是讓高保真模擬成為實體 AI 的基本組成部分。模擬創造出逼真的虛擬世界,讓機器人可以在其中進行廣泛的訓練,在受控的環境中產生大量符合成本效益的資料。
高保真模擬:NVIDIA 建立了物理上精確的虛擬環境,讓機器人可以學習並適應無數的情境,而不需承擔現實世界的風險或花費。這些模擬結合了逼真的物理、光線與感測器模型,可將技能轉移到實際機器人身上。
領域隨機化:為了建立更強大的人工智慧,NVIDIA 採用了領域隨機化技術。這項技術會改變模擬參數,例如重力、摩擦力和光線,讓 AI 面對各種不同的狀況。它可以防止模擬過度適應,並提高人工智能對真實世界複雜性的概括能力。有效的模擬需要速度與多樣性,才能接近現實。
RoboCASA:實體圖靈測試訓練
為此,NVIDIA 開發了 RoboCASA 架構
,模擬家庭環境。透過複製日常任務,RoboCASA 可訓練通用機器人在真實世界的環境中運作。
RoboCASA 提供高度的客製化能力,以簡化 AI 訓練。其中一個主要功能是由 AI 產生環境紋理,LLM 會建立 XML 程式碼來詳細描述 3D 資產。此方法可產生高度客製化的模擬平台。
數位雙胞胎與數位表親
NVIDIA 的模擬架構包含數位雙胞胎與數位表親的概念
.一個完美的數位孪生體可以一比一的精確度反映出其物理對應,這可能是一個挑戰。通常,生成物理模型 (或稱為表兄弟) 是一種實用的替代方案。
數位表兄弟是生成式物理引擎,可能會為了速度而犧牲一些精確度。它們的有效性在很大程度上取決於領域隨機化的應用。
有效使用模擬:主要原則
模擬原則
NVIDIA 為有效的機器人 AI 訓練建立了核心原則。首先是模擬世界的速度必須比即時快 10,000 倍。這種加速度可讓機器人體驗更多的情境,並加速模型迭代。最初的一百萬個模擬世界看似相似,但最終還是會出現獨特的挑戰,而有意義的 AI 學習正是發生在這些邊緣案例中。
訓練會在模擬「矩陣」中進行,之後會在現實中部署知識。與產生模擬資料相比,收集真實世界訓練資料的成本過高。
實體 AI 工具的定價
授權與開放原始碼的可及性
NVIDIA 認為開放原始碼開發對於 Physical AI 的未來至關重要。在 3 月的 GTC 會議上,NVIDIA 宣佈未來的核心模型將採用開放原始碼。此舉旨在使該領域民主化、擴大物理 AI 工具的存取範圍,並透過社群合作加速改進。這些模型將根據全球開發人員的意見持續演進。
未來之路:物理 AI 的優缺點
優點
顯著改善多個產業的效率。
提高危險工作環境的安全性。
提高在動態、非結構性環境中的適應能力。
透過工作自動化降低成本。
透過模擬進行 AI 訓練比實體試驗更經濟實惠。
缺點
系統開發與部署的初期投資較高。
耗電量大。
AI 系統通常仍需要人為監督或介入。
與自主系統故障或意外行為相關的潛在風險。
實體機器人硬體可能先於 AI 軟體疲勞或故障。
NVIDIA 實體 AI 生態系統的核心功能
實體 AI 的核心功能
NVIDIA Physical AI 策略的核心整合了模擬、高保真模型與合成資料,超越了簡單的任務執行。
以下各節將詳細介紹這些元件,在此僅作簡要概述。
NVIDIA GROOT:通用機器人 00 技術
GROOT 是 NVIDIA 雄心勃勃的計畫,旨在創造能執行各種任務的通用機器人。它包括為機器人建立統一的 AI 平台,讓開發人員可以在不同的硬體上部署模型。GROOT 包含必要的硬體、軟體與 AI 模型,為下一波智慧型機器人提供動力。
實體 API:縮小差距
NVIDIA 願景未來能讓軟體開發人員使用標準化的 Physical API,輕鬆控制實體系統。與軟體 API 將複雜性抽象化類似,Physical API 將為機器人、感測器和致動器提供一致的介面。這可讓開發人員專注於建立創新應用程式,而無需深厚的硬體專業知識。
革新產業:實體人工智慧的使用案例
利用實體人工智慧改造產業
Physical AI 有望改變許多產業,包括
- 製造業:將複雜的組裝自動化,以提高效率並降低成本。
- 物流業:使用自動駕駛車輛和機器人簡化倉庫、優化運送並改善供應鏈。
- 醫療保健:協助手術、運送補給品及提供病患支援。
- 農業:自動化作物監控、收割及其他農場工作,以提高產量並減少勞動力。
- 零售業:協助客戶、管理庫存及處理交易。
- 建築業:執行危險或重複性工作,以加強工人安全並加快工程進度。
每個產業應用都仰賴高效能運算硬體。
常見問題
什麼是實體人工智慧?
實體人工智慧 (Physical AI) 是將人工智慧整合至實體世界,讓機器人和自主系統能夠與環境進行智慧互動。
什麼是物理圖靈測試?
一項基準,用來評估機器人是否有能力像人類一樣執行實體任務。
模擬和數位孪生機器人有什麼好處?
模擬和數位孪生提供了一種安全、具成本效益的方法,以產生訓練強健機器人人工智慧所需的大量資料集。
什麼是 GROOT?
NVIDIA 開發創造多功能、通用機器人基礎平台的計畫。
相關問題
未來機器人的 AI 開發將面臨哪些挑戰?
開發機器人人工智慧面臨重大障礙,包括訓練所需的大量資料、高品質真實世界資料的稀少,以及取得資料的高昂成本。這些挑戰使得 AI 開發的典型困難更加複雜。提到的一個更廣泛的問題是,AI 預先訓練已經開始耗盡現成的資料來源。










 Suno 領投方:刪除貼文無法彌補版權訴訟的漏洞
備受矚目的 AI 音樂生成平台 Suno 正面臨一場艱難的版權之爭,而其主要投資人的坦率言論,可能正好提供了對方所期盼的證據。 Menlo Ventures(Suno的核心投資者)合夥人C.C. Gong最近刪除了一則推文,該推文與該公司當前的法律辯護策略直接相悖。在之前的版權訴訟中,Suno 的辯護主要依賴「合理使用」的論點,聲稱 AI 生成的音樂僅僅是一種「工具」,不會直接與受版權保護的原創作
Suno 領投方:刪除貼文無法彌補版權訴訟的漏洞
備受矚目的 AI 音樂生成平台 Suno 正面臨一場艱難的版權之爭,而其主要投資人的坦率言論,可能正好提供了對方所期盼的證據。 Menlo Ventures(Suno的核心投資者)合夥人C.C. Gong最近刪除了一則推文,該推文與該公司當前的法律辯護策略直接相悖。在之前的版權訴訟中,Suno 的辯護主要依賴「合理使用」的論點,聲稱 AI 生成的音樂僅僅是一種「工具」,不會直接與受版權保護的原創作
 Claude Opus 4.7 正式推出,重視可靠性勝於智能
Anthropic 今年持續保持強勁的開發步調,幾乎每隔一天就會推出新功能。備受期待的 Claude Opus 4.7 剛正式發布,有趣的是,Anthropic 在公告中直言不諱地表示:「這並非我們最強大的模型。」 傳聞中更強大的 Claude Mythos Preview 仍處於待命狀態。儘管如此,Opus 4.7 仍引起了相當大的關注,因為它著重解決的是「更可靠」而非「更聰明」的問題。基準測試
Claude Opus 4.7 正式推出,重視可靠性勝於智能
Anthropic 今年持續保持強勁的開發步調,幾乎每隔一天就會推出新功能。備受期待的 Claude Opus 4.7 剛正式發布,有趣的是,Anthropic 在公告中直言不諱地表示:「這並非我們最強大的模型。」 傳聞中更強大的 Claude Mythos Preview 仍處於待命狀態。儘管如此,Opus 4.7 仍引起了相當大的關注,因為它著重解決的是「更可靠」而非「更聰明」的問題。基準測試
 海爾推出全球最輕的 AI 運動外骨骼機器人,重量僅 1.75 公斤
海爾集團推出全球最輕量的運動用人工智慧外骨骼機器人——海爾外骨骼機器人 W3。此次發布創下業界最輕量的新紀錄,標誌著在輕量化設計與智能人體動作增強領域取得重大突破。頂級材質成就超輕量設計W3採用創新的一體成型製造工藝,結合全碳纖維與鈦合金。這種航空級材質組合將總重量控制在僅1.75公斤,實現了輕量化與強度兼備的極致機械性能。為提升舒適度,機器人內置非牛頓流體材質,接觸皮膚時觸感柔軟,但在劇烈運動時
海爾推出全球最輕的 AI 運動外骨骼機器人,重量僅 1.75 公斤
海爾集團推出全球最輕量的運動用人工智慧外骨骼機器人——海爾外骨骼機器人 W3。此次發布創下業界最輕量的新紀錄,標誌著在輕量化設計與智能人體動作增強領域取得重大突破。頂級材質成就超輕量設計W3採用創新的一體成型製造工藝,結合全碳纖維與鈦合金。這種航空級材質組合將總重量控制在僅1.75公斤,實現了輕量化與強度兼備的極致機械性能。為提升舒適度,機器人內置非牛頓流體材質,接觸皮膚時觸感柔軟,但在劇烈運動時
立即前往 XIX.AI,探索 2026 年最優秀的少年漫畫 AI 生成工具。我們精心挑選的頂級清單,匯集了能打造高張力動作場面與動態能量特效的強大工具。透過實際測試,比較免費與付費選項的差異。釋放您的創作潛能,今天就開始打造史詩級漫畫吧!
15 個工具
xix.ai

2026 年最新最佳 AI 報銷管理工具:備受好評的解決方案,可自動掃描收據並分類企業支出。探索強大且顛覆傳統的解決方案,助您輕鬆管理報銷、精準追蹤財務,並簡化合規流程。我們精心整理並每週更新的免費與付費方案比較指南,將協助您找到最合適的選擇。透過 XIX.AI 的專家精選,釋放您的 AI 優勢。
10 個工具
xix.ai

在 XIX.AI 探索 2026 年最新且評價最高的 AI 招聘工具。我們精心挑選的清單收錄了強大且具顛覆性的解決方案,可協助篩選履歷並自動化安排候選人面試。透過實際測試與每週更新的排行榜,比較免費與付費選項。立即找到最適合您的招聘助手,並優化您的招聘流程!
10 個工具
xix.ai

立即在 XIX.AI 探索 2026 年最佳 AI 個人健康與專注力教練。我們精心策劃的排行榜收錄了備受好評、能帶來革命性改變的工具,助您管理倦怠感並提升精神能量。透過實際使用心得,比較免費與付費方案的差異。立即開啟通往巔峰生產力與身心健康的道路。
10 個工具
xix.ai

探索 2026 年最新、評價最高的 AI 浪漫聊天機器人,助您建立真摯且長久的連結。我們精心整理的清單包含功能強大且性格鮮明的聊天機器人、免費與付費版本的比較,以及實際測試結果。立即前往 XIX.AI 尋找您的完美伴侶,並開始建立這段關係吧。
10 個工具
xix.ai

探索2026年最優秀的人工智慧資料科學導師,幫助他們掌握SQL、Pandas以及機器學習工作流程。在XIX.AI上檢視我們精心挑選的頂級導師名單,獲得強大而具有變革性的指導。透過對比免費和付費選項,並結合實際應用案例進行了解,今天就開啟你的資料科學精通之路吧。
10 個工具
xix.ai













