
















 首页
首页我们如何建立新的双子座机器人技术模型
随着谷歌DeepMind为最新的Gemini 2.0机器人定制模型公告做准备,机器人部门负责人卡罗琳娜·帕拉达(Carolina Parada)召集她的团队对技术进行最后一次检查。
他们挑战了一台双臂ALOHA机器人——你知道,那些研究人员喜欢使用的灵活金属手臂,带有多个关节和钳状手——让它完成从未做过的新任务,处理从未见过的物体。卡罗琳娜回忆说:“我们向它扔了一些随机物品,比如把我的鞋子放在桌上,要求它把几支笔塞进去。”“机器人停顿了一秒以理解情况,然后就去执行了。”
接下来,他们找到一个玩具篮球框和球,挑战机器人进行“灌篮”。卡罗琳娜忍不住为它的完美表现感到骄傲。
卡罗琳娜说,观看灌篮真是一个“哇”的时刻。
“我们一直在训练模型来帮助机器人完成特定任务并理解自然语言,但这次?这完全改变了游戏规则,”卡罗琳娜解释道。“机器人对篮球或这个特定玩具毫无经验。然而,它理解了‘将球灌篮’这一复杂概念,并顺利完成了。第一次就成功了。”
这个多功能机器人由Gemini Robotics模型驱动,这是专为机器人设计的新一批多模态模型的一部分。这些模型通过针对机器人的特定数据进行微调,增强了Gemini 2.0,将物理动作与Gemini通常的多模态输出(如文本、视频和音频)结合在一起。谷歌首席执行官桑达尔·皮查伊(Sundar Pichai)在X上发布新模型时说:“这一里程碑为下一波可应用于各种场景的机器人奠定了基础。”
Gemini Robotics模型极其多功能、交互性强且通用,使机器人无需额外训练即可应对新物体、新环境和新指令。考虑到团队的目标,这是一个重大突破。
“我们的目标是创建具身AI,赋予机器人帮助处理现实世界中日常任务的能力,”卡罗琳娜说,她对机器人的热爱源于儿时看的科幻卡通和自动化家务的梦想。“未来,机器人将成为我们与AI交互的另一种方式,就像我们的手机或电脑一样——成为我们世界中的物理代理。”
机器人要出色且安全地完成工作,需要两种关键能力:理解和决策,以及行动能力。基于Gemini 2.0 Flash构建的“具身推理”模型Gemini Robotics-ER专注于前者。它可以识别环境中元素,判断它们的大小和位置,预测移动它们所需的路径和抓取方式。然后,它生成代码来执行动作。我们现已将此模型推广给可信测试者和合作伙伴。
谷歌DeepMind还推出了Gemini Robotics,这是顶级的视觉-语言-动作模型,让机器人能够分析场景、与用户互动并采取行动。它在机器人专家头痛的领域——灵巧性——取得了巨大进步。卡罗琳娜指出:“对我们人类来说是第二天性的东西,对机器人来说却很困难。”“灵巧性涉及空间推理和复杂的物理操作。在测试中,Gemini Robotics为灵巧性设定了新标杆,处理复杂的多步骤任务时动作流畅,完成时间令人印象深刻。”
Gemini Robotics-ER在具身推理方面表现出色,擅长物体检测、指向物体部分、寻找匹配点和3D物体检测。
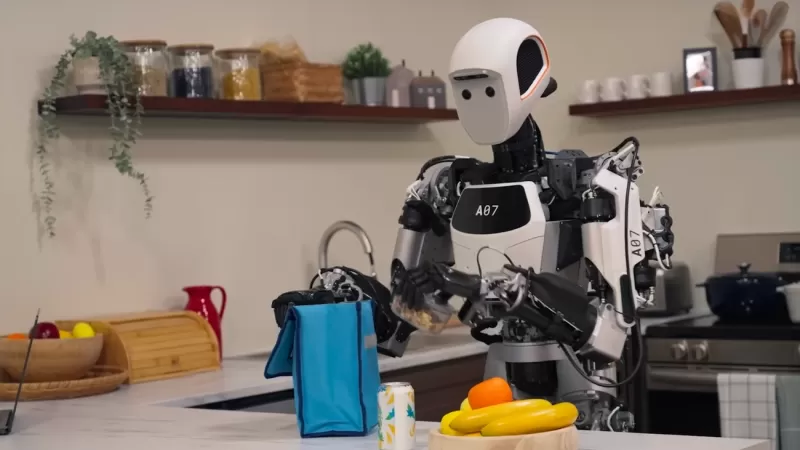
在Gemini Robotics的带领下,机器人已经能够制作沙拉、打包儿童午餐、玩井字游戏,甚至折叠一只折纸狐狸。
让模型准备好处理广泛的任务并非易事——主要是因为这与为单一特定任务训练模型直到完美的传统背道而驰。卡罗琳娜说:“我们选择了广泛任务学习,用大量任务训练模型。”“我们认为,经过一段时间后,模型会开始泛化,我们的判断完全正确。”
这两种模型都能适应各种具身形式,从研究型机器人如双臂ALOHA到我们合作伙伴Apptronik开发的类人机器人Apollo。
这些模型可以适应不同形态,执行如打包午餐盒或擦白板等任务,适用于各种机器人身体。
这种适应性对于机器人可能承担多种角色的未来至关重要。
卡罗琳娜说:“使用这些高度通用且能力强大的模型的机器人的潜力巨大且令人兴奋。”“它们在复杂、需要精确且非为人类设计的空间中可能非常有用。它们还可以在以人为中心的空间(如我们的家)中让生活更轻松。这还有一段路要走,但这些模型正在推动我们前进。”
看来帮助处理家务的日子可能即将来临——最终会实现的。
相关文章
 WordPress.com 现已支持 AI 助手撰写和发布文章,还有更多功能
广受欢迎的网站托管和发布平台 WordPress.com 现已开始引入人工智能助手——这一举措或将重塑网络的呈现方式。该公司于周五宣布,将允许人工智能助手在用户网站上起草、编辑和发布内容,同时还能管理评论、更新和修正元数据,并通过标签和分类对内容进行整理。所有这些操作均通过一个界面进行控制,网站所有者只需使用自然语言命令说明其需求即可。凭借这些新功能,网站几乎可以完全由人工指导的AI代理来创建和运
Kakao Mobility 概述了面向物理人工智能的 L4 级自动驾驶路线图
Kakao Mobility 计划内部自主研发 L4 级自动驾驶技术,作为其物理人工智能战略的一部分。在首尔COEX举行的2026世界IT展上,Kakao Mobility副总裁兼物理AI部门负责人金镇奎(Kim Jin-kyu)介绍了该路线图。他的演讲聚焦于物理AI时代基于出行平台构建的自动驾驶服务。据韩联社报道,这场题为“超越构想,付诸行动:AI驱动现实”的活动汇聚了来自17个国家的460
巴里·迪勒:随着通用人工智能的临近,对萨姆·阿尔特曼的信任已无关紧要
尽管近期有报道暗示相反的情况,但亿万富翁、媒体大亨巴里·迪勒并不认为OpenAI首席执行官山姆·阿尔特曼不可信。本周,迪勒在《华尔街日报》举办的“万物未来”峰会上发表演讲时,为阿尔特曼进行了辩护。此前,阿尔特曼曾遭到一些前同事和董事会成员的指责,称其有时会采取操纵和欺骗手段。作为阿尔特曼的朋友,迪勒是在回答一个关于人们是否应该信任阿尔特曼以确保人工智能造福人类的问题时作出上述表态的。具体而言,提问
相关专题推荐
商业
WordPress.com 现已支持 AI 助手撰写和发布文章,还有更多功能
广受欢迎的网站托管和发布平台 WordPress.com 现已开始引入人工智能助手——这一举措或将重塑网络的呈现方式。该公司于周五宣布,将允许人工智能助手在用户网站上起草、编辑和发布内容,同时还能管理评论、更新和修正元数据,并通过标签和分类对内容进行整理。所有这些操作均通过一个界面进行控制,网站所有者只需使用自然语言命令说明其需求即可。凭借这些新功能,网站几乎可以完全由人工指导的AI代理来创建和运
Kakao Mobility 概述了面向物理人工智能的 L4 级自动驾驶路线图
Kakao Mobility 计划内部自主研发 L4 级自动驾驶技术,作为其物理人工智能战略的一部分。在首尔COEX举行的2026世界IT展上,Kakao Mobility副总裁兼物理AI部门负责人金镇奎(Kim Jin-kyu)介绍了该路线图。他的演讲聚焦于物理AI时代基于出行平台构建的自动驾驶服务。据韩联社报道,这场题为“超越构想,付诸行动:AI驱动现实”的活动汇聚了来自17个国家的460
巴里·迪勒:随着通用人工智能的临近,对萨姆·阿尔特曼的信任已无关紧要
尽管近期有报道暗示相反的情况,但亿万富翁、媒体大亨巴里·迪勒并不认为OpenAI首席执行官山姆·阿尔特曼不可信。本周,迪勒在《华尔街日报》举办的“万物未来”峰会上发表演讲时,为阿尔特曼进行了辩护。此前,阿尔特曼曾遭到一些前同事和董事会成员的指责,称其有时会采取操纵和欺骗手段。作为阿尔特曼的朋友,迪勒是在回答一个关于人们是否应该信任阿尔特曼以确保人工智能造福人类的问题时作出上述表态的。具体而言,提问
相关专题推荐
商业
 最佳 AI 费用追踪工具:扫描收据并自动分类企业开支
最佳 AI 费用追踪工具:扫描收据并自动分类企业开支
2026年最新最佳AI报销管理工具:广受好评的解决方案,可自动扫描收据并分类企业支出。探索这些功能强大、颠覆传统的解决方案,助您轻松管理报销、精准追踪财务并简化合规流程。我们精心整理并每周更新的免费与付费选项对比指南,助您找到最适合的工具。通过XIX.AI的专家精选,释放您的AI优势。
 10 个工具
10 个工具
 xix.ai
商业
最佳人工智能招聘工具:筛选简历并自动安排候选人面试
xix.ai
商业
最佳人工智能招聘工具:筛选简历并自动安排候选人面试
在 XIX.AI 上探索 2026 年最新、评价最高的人工智能招聘工具。我们精心筛选的清单汇集了功能强大、颠覆传统的解决方案,可帮助您筛选简历并自动安排候选人面试。通过实际测试和每周更新的排名,对比免费与付费选项。立即找到最适合您的招聘助手,优化您的招聘流程!
10 个工具
xix.ai
生产率
AI个人健康与专注力教练:缓解倦怠,提升精神能量
立即访问 XIX.AI,探索 2026 年最优秀的 AI 个人健康与专注力教练。我们的精选排行榜汇集了广受好评、具有颠覆性意义的工具,助您缓解倦怠、提升精神能量。通过真实案例分析,对比免费与付费选项。立即开启通往巅峰生产力和身心健康的道路。
10 个工具
xix.ai
聊天机器人
备受好评的AI浪漫聊天机器人:凭借稳定的个性建立长期关系
探索2026年最新、评价最高的人工智能浪漫聊天机器人,助您建立真实而长久的联系。我们的精选清单涵盖了功能强大且性格鲜明的聊天机器人,并提供了免费与付费版本的对比分析以及实际测试结果。在XIX.AI上找到您的完美伴侣,立即开始建立联系吧。
10 个工具
xix.ai
教育与学习
最佳AI数据科学导师:精通SQL、Pandas及机器学习工作流程
探索2026年最优秀的人工智能数据科学导师,帮助他们掌握SQL、Pandas以及机器学习工作流程。在XIX.AI上查看我们精心挑选的顶级导师名单,获得强大而具有变革性的指导。通过对比免费和付费选项,并结合实际应用案例进行了解,今天就开启你的数据科学精通之路吧。
10 个工具
xix.ai
聊天机器人
最佳AI调情与对话训练工具:实时提升社交魅力与自信
在 XIX.AI 上探索 2026 年最优秀的 AI 调情与对话训练工具。我们精心挑选的高评分工具助您实时提升社交魅力与自信。探索这些必试的、颠覆性的工具,查看免费版与付费版的对比,并了解每周更新的排行榜。立即开启您的社交优势。
10 个工具
xix.ai

 评论 (24)
0/500
评论 (24)
0/500
![JoseAdams]()
Ces bras robotiques ALOHA sont impressionnants, mais je me demande vraiment quel sera leur coût réel pour les petites entreprises. L'article montre bien la partie technique, mais dans le monde réel, l'accès financier compte tout autant. C'est un peu inquiétant pour la compétitivité à long terme. 🤔
![LarryEvans]()
Cet article sur les robots Gemini est fascinant ! 🤖 L'idée d'utiliser l'IA pour contrôler des bras robotisés comme l'ALOHA pourrait vraiment révolutionner l'automatisation industrielle. Mais ça me fait un peu peur aussi - est-ce qu'on va vers un monde où les humains seront remplacés par des machines trop intelligentes ? 😅
![CarlGarcia]()
Finalmente um modelo de robótica que parece promissor! 🤖 Mas confesso que fico pensando se esses braços robóticos vão substituir humanos em tarefas domésticas... Será que um dia vou ter um robô fazendo meu café da manhã? 😅
![KeithLopez]()
The Gemini 2.0 robotics models sound like a game-changer! I’m curious how those bi-arm ALOHA robots handle real-world tasks—hope they don’t get too cocky with all that flexibility! 🤖
![WilliamMiller]()
Os novos modelos de robótica Gemini são de tirar o fôlego! Ver o robô ALOHA em ação foi como ver ficção científica se tornar realidade. Mas, o jargão técnico foi um pouco acima da minha compreensão. Poderia usar uma explicação mais simples para nós, não técnicos. Ainda assim, super legal! 🤖
![StephenGreen]()
新しいジェミニロボティクスモデルは驚異的です!ALOHAロボットの動きを見るのは、SFが現実になったようでした。でも、技術用語が少し難しかったです。非技術者向けに簡単な説明が欲しいです。それでも、すごくクール!🤖
随着谷歌DeepMind为最新的Gemini 2.0机器人定制模型公告做准备,机器人部门负责人卡罗琳娜·帕拉达(Carolina Parada)召集她的团队对技术进行最后一次检查。
他们挑战了一台双臂ALOHA机器人——你知道,那些研究人员喜欢使用的灵活金属手臂,带有多个关节和钳状手——让它完成从未做过的新任务,处理从未见过的物体。卡罗琳娜回忆说:“我们向它扔了一些随机物品,比如把我的鞋子放在桌上,要求它把几支笔塞进去。”“机器人停顿了一秒以理解情况,然后就去执行了。”
接下来,他们找到一个玩具篮球框和球,挑战机器人进行“灌篮”。卡罗琳娜忍不住为它的完美表现感到骄傲。
“我们一直在训练模型来帮助机器人完成特定任务并理解自然语言,但这次?这完全改变了游戏规则,”卡罗琳娜解释道。“机器人对篮球或这个特定玩具毫无经验。然而,它理解了‘将球灌篮’这一复杂概念,并顺利完成了。第一次就成功了。”
这个多功能机器人由Gemini Robotics模型驱动,这是专为机器人设计的新一批多模态模型的一部分。这些模型通过针对机器人的特定数据进行微调,增强了Gemini 2.0,将物理动作与Gemini通常的多模态输出(如文本、视频和音频)结合在一起。谷歌首席执行官桑达尔·皮查伊(Sundar Pichai)在X上发布新模型时说:“这一里程碑为下一波可应用于各种场景的机器人奠定了基础。”
Gemini Robotics模型极其多功能、交互性强且通用,使机器人无需额外训练即可应对新物体、新环境和新指令。考虑到团队的目标,这是一个重大突破。
“我们的目标是创建具身AI,赋予机器人帮助处理现实世界中日常任务的能力,”卡罗琳娜说,她对机器人的热爱源于儿时看的科幻卡通和自动化家务的梦想。“未来,机器人将成为我们与AI交互的另一种方式,就像我们的手机或电脑一样——成为我们世界中的物理代理。”
谷歌DeepMind还推出了Gemini Robotics,这是顶级的视觉-语言-动作模型,让机器人能够分析场景、与用户互动并采取行动。它在机器人专家头痛的领域——灵巧性——取得了巨大进步。卡罗琳娜指出:“对我们人类来说是第二天性的东西,对机器人来说却很困难。”“灵巧性涉及空间推理和复杂的物理操作。在测试中,Gemini Robotics为灵巧性设定了新标杆,处理复杂的多步骤任务时动作流畅,完成时间令人印象深刻。”
让模型准备好处理广泛的任务并非易事——主要是因为这与为单一特定任务训练模型直到完美的传统背道而驰。卡罗琳娜说:“我们选择了广泛任务学习,用大量任务训练模型。”“我们认为,经过一段时间后,模型会开始泛化,我们的判断完全正确。”
这两种模型都能适应各种具身形式,从研究型机器人如双臂ALOHA到我们合作伙伴Apptronik开发的类人机器人Apollo。
卡罗琳娜说:“使用这些高度通用且能力强大的模型的机器人的潜力巨大且令人兴奋。”“它们在复杂、需要精确且非为人类设计的空间中可能非常有用。它们还可以在以人为中心的空间(如我们的家)中让生活更轻松。这还有一段路要走,但这些模型正在推动我们前进。”
看来帮助处理家务的日子可能即将来临——最终会实现的。










 WordPress.com 现已支持 AI 助手撰写和发布文章,还有更多功能
广受欢迎的网站托管和发布平台 WordPress.com 现已开始引入人工智能助手——这一举措或将重塑网络的呈现方式。该公司于周五宣布,将允许人工智能助手在用户网站上起草、编辑和发布内容,同时还能管理评论、更新和修正元数据,并通过标签和分类对内容进行整理。所有这些操作均通过一个界面进行控制,网站所有者只需使用自然语言命令说明其需求即可。凭借这些新功能,网站几乎可以完全由人工指导的AI代理来创建和运
Kakao Mobility 概述了面向物理人工智能的 L4 级自动驾驶路线图
Kakao Mobility 计划内部自主研发 L4 级自动驾驶技术,作为其物理人工智能战略的一部分。在首尔COEX举行的2026世界IT展上,Kakao Mobility副总裁兼物理AI部门负责人金镇奎(Kim Jin-kyu)介绍了该路线图。他的演讲聚焦于物理AI时代基于出行平台构建的自动驾驶服务。据韩联社报道,这场题为“超越构想,付诸行动:AI驱动现实”的活动汇聚了来自17个国家的460
WordPress.com 现已支持 AI 助手撰写和发布文章,还有更多功能
广受欢迎的网站托管和发布平台 WordPress.com 现已开始引入人工智能助手——这一举措或将重塑网络的呈现方式。该公司于周五宣布,将允许人工智能助手在用户网站上起草、编辑和发布内容,同时还能管理评论、更新和修正元数据,并通过标签和分类对内容进行整理。所有这些操作均通过一个界面进行控制,网站所有者只需使用自然语言命令说明其需求即可。凭借这些新功能,网站几乎可以完全由人工指导的AI代理来创建和运
Kakao Mobility 概述了面向物理人工智能的 L4 级自动驾驶路线图
Kakao Mobility 计划内部自主研发 L4 级自动驾驶技术,作为其物理人工智能战略的一部分。在首尔COEX举行的2026世界IT展上,Kakao Mobility副总裁兼物理AI部门负责人金镇奎(Kim Jin-kyu)介绍了该路线图。他的演讲聚焦于物理AI时代基于出行平台构建的自动驾驶服务。据韩联社报道,这场题为“超越构想,付诸行动:AI驱动现实”的活动汇聚了来自17个国家的460
 巴里·迪勒:随着通用人工智能的临近,对萨姆·阿尔特曼的信任已无关紧要
尽管近期有报道暗示相反的情况,但亿万富翁、媒体大亨巴里·迪勒并不认为OpenAI首席执行官山姆·阿尔特曼不可信。本周,迪勒在《华尔街日报》举办的“万物未来”峰会上发表演讲时,为阿尔特曼进行了辩护。此前,阿尔特曼曾遭到一些前同事和董事会成员的指责,称其有时会采取操纵和欺骗手段。作为阿尔特曼的朋友,迪勒是在回答一个关于人们是否应该信任阿尔特曼以确保人工智能造福人类的问题时作出上述表态的。具体而言,提问
巴里·迪勒:随着通用人工智能的临近,对萨姆·阿尔特曼的信任已无关紧要
尽管近期有报道暗示相反的情况,但亿万富翁、媒体大亨巴里·迪勒并不认为OpenAI首席执行官山姆·阿尔特曼不可信。本周,迪勒在《华尔街日报》举办的“万物未来”峰会上发表演讲时,为阿尔特曼进行了辩护。此前,阿尔特曼曾遭到一些前同事和董事会成员的指责,称其有时会采取操纵和欺骗手段。作为阿尔特曼的朋友,迪勒是在回答一个关于人们是否应该信任阿尔特曼以确保人工智能造福人类的问题时作出上述表态的。具体而言,提问

2026年最新最佳AI报销管理工具:广受好评的解决方案,可自动扫描收据并分类企业支出。探索这些功能强大、颠覆传统的解决方案,助您轻松管理报销、精准追踪财务并简化合规流程。我们精心整理并每周更新的免费与付费选项对比指南,助您找到最适合的工具。通过XIX.AI的专家精选,释放您的AI优势。
10 个工具
xix.ai
在 XIX.AI 上探索 2026 年最新、评价最高的人工智能招聘工具。我们精心筛选的清单汇集了功能强大、颠覆传统的解决方案,可帮助您筛选简历并自动安排候选人面试。通过实际测试和每周更新的排名,对比免费与付费选项。立即找到最适合您的招聘助手,优化您的招聘流程!
10 个工具
xix.ai
立即访问 XIX.AI,探索 2026 年最优秀的 AI 个人健康与专注力教练。我们的精选排行榜汇集了广受好评、具有颠覆性意义的工具,助您缓解倦怠、提升精神能量。通过真实案例分析,对比免费与付费选项。立即开启通往巅峰生产力和身心健康的道路。
10 个工具
xix.ai
探索2026年最新、评价最高的人工智能浪漫聊天机器人,助您建立真实而长久的联系。我们的精选清单涵盖了功能强大且性格鲜明的聊天机器人,并提供了免费与付费版本的对比分析以及实际测试结果。在XIX.AI上找到您的完美伴侣,立即开始建立联系吧。
10 个工具
xix.ai
探索2026年最优秀的人工智能数据科学导师,帮助他们掌握SQL、Pandas以及机器学习工作流程。在XIX.AI上查看我们精心挑选的顶级导师名单,获得强大而具有变革性的指导。通过对比免费和付费选项,并结合实际应用案例进行了解,今天就开启你的数据科学精通之路吧。
10 个工具
xix.ai
在 XIX.AI 上探索 2026 年最优秀的 AI 调情与对话训练工具。我们精心挑选的高评分工具助您实时提升社交魅力与自信。探索这些必试的、颠覆性的工具,查看免费版与付费版的对比,并了解每周更新的排行榜。立即开启您的社交优势。
10 个工具
xix.ai

Ces bras robotiques ALOHA sont impressionnants, mais je me demande vraiment quel sera leur coût réel pour les petites entreprises. L'article montre bien la partie technique, mais dans le monde réel, l'accès financier compte tout autant. C'est un peu inquiétant pour la compétitivité à long terme. 🤔
Cet article sur les robots Gemini est fascinant ! 🤖 L'idée d'utiliser l'IA pour contrôler des bras robotisés comme l'ALOHA pourrait vraiment révolutionner l'automatisation industrielle. Mais ça me fait un peu peur aussi - est-ce qu'on va vers un monde où les humains seront remplacés par des machines trop intelligentes ? 😅
Finalmente um modelo de robótica que parece promissor! 🤖 Mas confesso que fico pensando se esses braços robóticos vão substituir humanos em tarefas domésticas... Será que um dia vou ter um robô fazendo meu café da manhã? 😅
The Gemini 2.0 robotics models sound like a game-changer! I’m curious how those bi-arm ALOHA robots handle real-world tasks—hope they don’t get too cocky with all that flexibility! 🤖
Os novos modelos de robótica Gemini são de tirar o fôlego! Ver o robô ALOHA em ação foi como ver ficção científica se tornar realidade. Mas, o jargão técnico foi um pouco acima da minha compreensão. Poderia usar uma explicação mais simples para nós, não técnicos. Ainda assim, super legal! 🤖
新しいジェミニロボティクスモデルは驚異的です!ALOHAロボットの動きを見るのは、SFが現実になったようでした。でも、技術用語が少し難しかったです。非技術者向けに簡単な説明が欲しいです。それでも、すごくクール!🤖













